Clear Sky Science · ja
ソフトロボティクスの前進:誘電エラストマーおよび誘電流体アクチュエータの最近の進展
筋肉のように動くソフトロボット
子どもを安全に抱きしめたり、倒壊現場の瓦礫の間を這って進んだり、衰弱した心臓を優しくマッサージしたりできるロボットを想像してみてください。そうした仕事をこなすには、金属のようにガチャガチャ動くのではなく、生体組織のように曲がり伸びる必要があります。本レビューは、ゴム状の固体や液体から作られる新しいクラスの「ソフト」電気筋肉がそのビジョンを現実に近づけつつあること、そして研究室から日常に出るまでに残る課題を説明します。
剛性モーターからソフトな電気筋肉へ
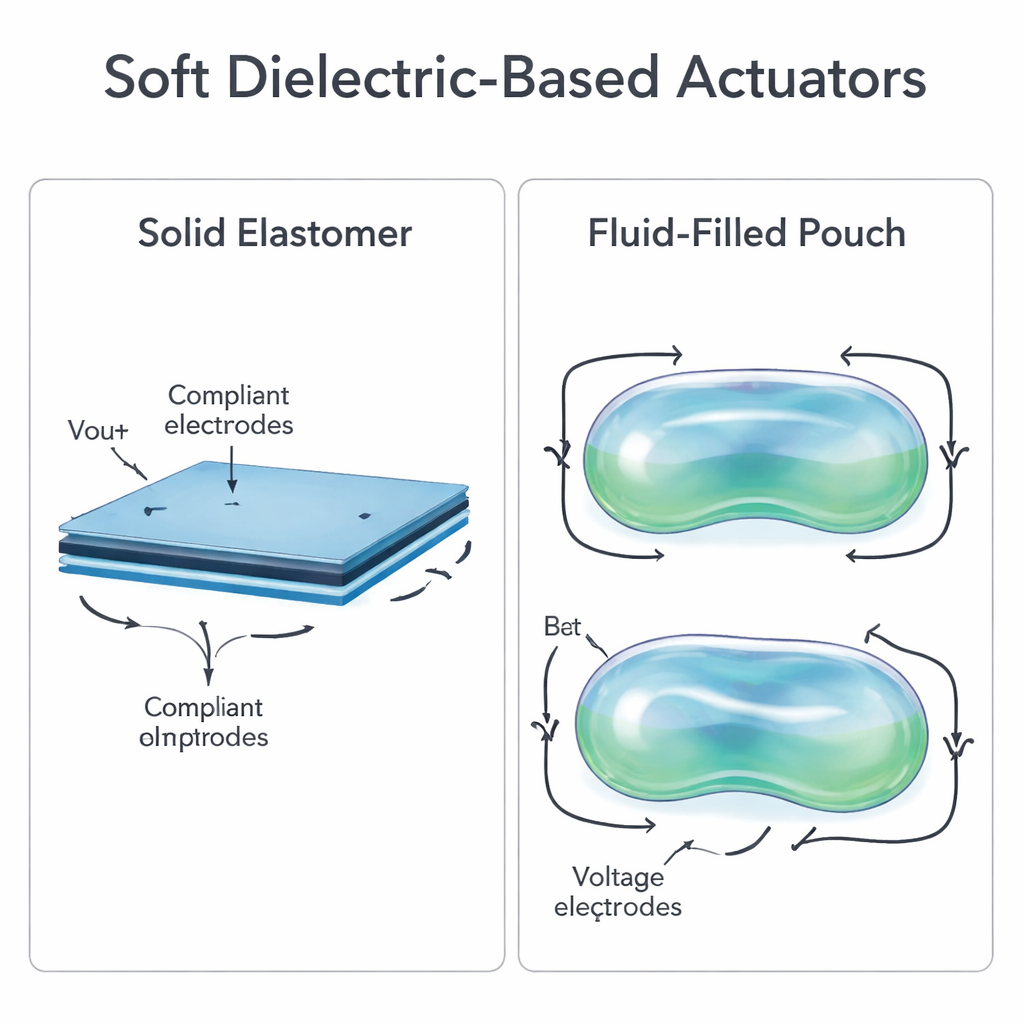
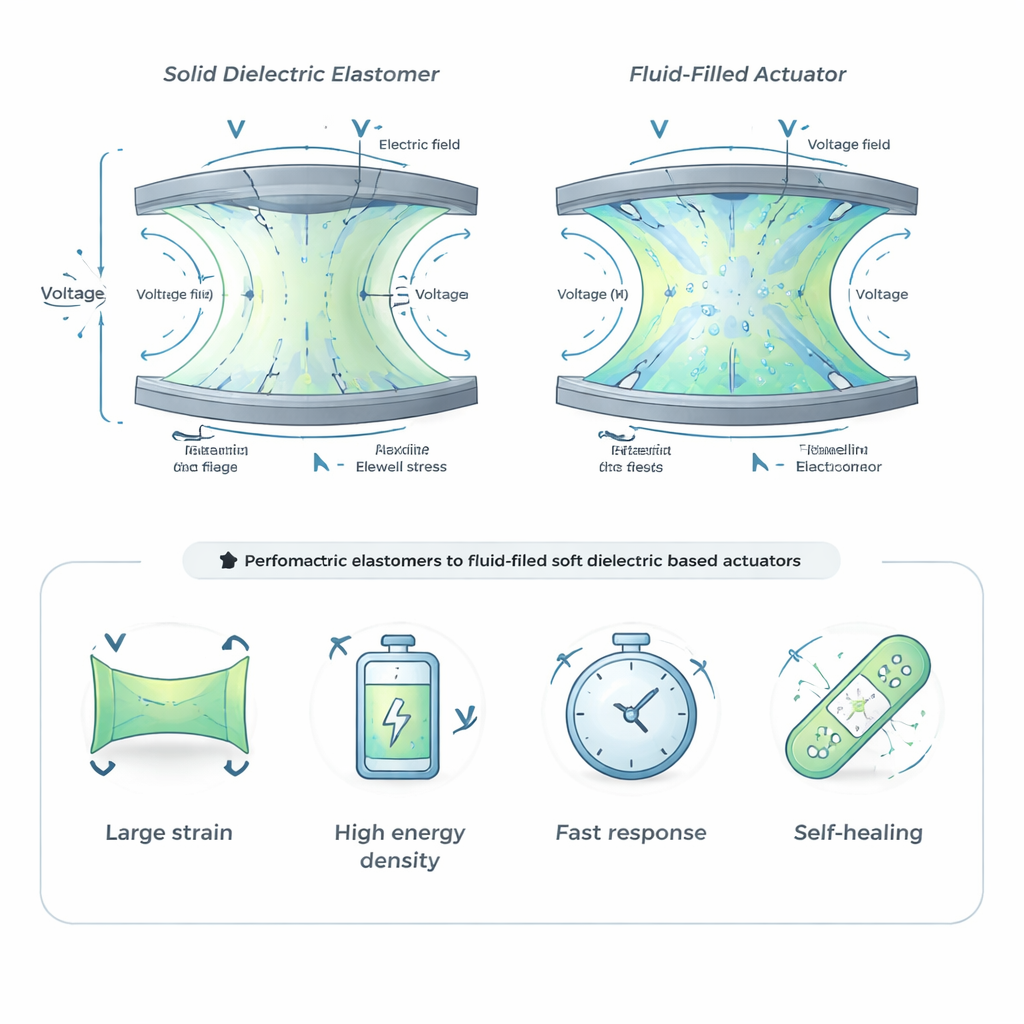
大半の産業用ロボットは重くて剛性の高いモーターとギアに依存しています。それらは高出力で精密ですが、コストが高く壊れやすく、人のそばでは危険になり得ます。シリコーン製のベーキング型や輪ゴムに似た伸縮性材料で作られるソフトロボットは、力任せの強さを手放す代わりに、優しさ、順応性、耐久性を獲得します。本稿の焦点は電気で駆動されるソフトアクチュエータです。誘電エラストマーアクチュエータ(DEA)は弾性ゴム層を使い、誘電流体アクチュエータ(DFA)は柔軟なポーチに封入した電気絶縁液体を使います。いずれの場合も、二つの柔軟な電極間に電圧をかけることで静電力が材料を押し縮め、電気エネルギーを大きなひずみ、高いエネルギー密度、速い応答に直接変換します。
材料が筋肉を動かす仕組み
有用な筋肉のように振る舞わせるには、これらのデバイスに非常に特定の材料性が求められます。DEAでは中心となるゴムシートが非常に柔らかく容易に伸びる一方で、高電界に耐えて破れたり短絡したりしない必要があります。研究者たちはこのバランスを二つの主要戦略で調整します。一つは新しいポリマーを設計することです。アクリル、シリコーン、ポリウレタンからより複雑なブロックコポリマーまで、柔軟で低剛性のネットワークに多くの極性化学基(電気応答を高める)を取り込む手法です。もう一つは微粒子や液体を混ぜて電気エネルギーを蓄える能力を高める複合材料を作ることです。DFAの設計でも同様の考え方が働きます:エンジニアは適切な粘度、安定性、および薄いプラスチックやシリコーンの殻と相性の良い油やその他の誘電液を選び、電圧で流体を迅速に押し動かして膨らみや打撃、振動を生み出しつつ漏れや化学分解を防ぎます。
スケールに応じたソフトアクチュエータの構築と駆動
これらの巧妙な材料を信頼できるデバイスに仕立てること自体もまた工学的課題です。従来の製造は薄膜をフレームに張る、柔らかい電極を塗布・印刷する、積層する、そしてDFAでは液体を注入して封をするなど手作業が多く手間がかかります。本稿はインクジェットやスクリーン印刷、繊維状の筋肉の押出、多素材3Dプリントといった新しい製造法を概観します。後者は電極と誘電体を一度に配置できることもあります。また、形状の違いが異なる動作を生むことも説明します:面積が拡大する平坦なパッチ、盛り上がるドーム、長さ方向に収縮するロール状シリンダー、曲げや振動を生む構造などです。これらの材料は経年劣化、漏洩、電気的破壊で故障するため、著者らは寿命試験と一般的な故障モードをまとめ、火花や刺し傷の後に回復できる自己修復設計への取り組みを強調しています。
高度な制御と新たな応用
自然の筋肉と同様に、ソフトアクチュエータは制御が必要です。単純なオープンループ方式は電圧パターンを与えるだけですが、素材が温度上昇やクリープにより挙動を変えるとズレが生じます。より進んだアプローチではセンサーを埋め込む、あるいはアクチュエータ自身の電気信号を使ってひずみ、力、振動をリアルタイムで測定し、駆動信号を調整します。研究者たちは現在、ソフト材料の非線形で履歴依存的な振る舞いに対処できるよう、機械学習や強化学習による制御器を試しています。応用面では、本稿は広がりある領域を紹介します:自重の何倍も持ち上げる人工筋肉、泳いだり飛んだりする魚や昆虫に似たロボット、リアルな触覚を提供するウェアラブルハプティックバンドや指先パッド、イカや人の目に着想を得たズームレンズや光学皮膜、形状変化する表面、そしていつか衰弱した心臓や麻痺した顔を助けるかもしれない医療用コンセプト機器などです。
実験室のデモから実世界のロボットへ立ちはだかる課題
これらの電気筋肉には大きな可能性がある一方で、家庭用のヘルパーや医療埋め込み機器、量産ウェアラブルに安全に搭載されるまでにはいくつかの障壁があります。多くはキロボルト級の駆動電圧を必要とし、安全性や電子機器設計を複雑にします。短期試験で優れた性能を示す材料も、数百万サイクル後に硬化したり乾燥したり故障したりします。製造は大規模生産には遅く不均一になりがちです。また、現在の多くのポリマーはリサイクルや生分解が難しいままです。著者らは、進展はスケール横断的な共同設計に依存すると論じます:低剛性、高い電気応答、堅牢性、さらには自己修復性を兼ね備えた新しいソフト材料、自動化されデータ駆動の製造と試験、内蔵センサーと軽量AIを活用する制御システム。これらが揃えば、将来のロボットは強く速いだけでなく、安全で適応的、そして持続可能な“筋肉”を備えることができるでしょう。
引用: Molla, M.H.O.R., Chen, J. & Xu, C. Advancing soft robotics: recent progress in dielectric elastomer and fluid actuators. npj Robot 4, 17 (2026). https://doi.org/10.1038/s44182-026-00074-3
キーワード: ソフトロボティクス, 誘電エラストマーアクチュエータ, 誘電流体アクチュエータ, 人工筋肉, ハプティックインターフェース