Clear Sky Science · ja
個別化・ターゲット型インタラクティブ支援のためのモデル予測ゲーム制御
よきトレーニングパートナーのように感じられるロボット
いつ助けるべきか、少し頑張らせるべきか、次にどれくらい強く動こうとしているかを常に見極める運動パートナーや理学療法士を想像してみてください。本稿は、リハビリや工場で使われる外骨格などの接触型ロボットに同様の直感を与える方法を示します。人が次の1〜2秒にどう動くつもりかを数学的に「推測」することで、ロボットは力の分担を滑らかにし、疲労を減らし、人の動きや学習をさりげなく導けるようになります。
ロボットと力を分かち合うのが難しい理由
ロボットが人と物理的につながり—手足の動きを助けたり重い物を運んだりする場合—両者は常に押し合い、反応し合っています。従来のロボット制御は多くの場合、人間の計画を無視して、精度やエネルギー節約といった性能目標だけを追います。その結果、ロボットは過度に硬く命令的になったり、逆に受け身で役立たなくなったりします。実際の人間のパートナーはもっと優れており、相手の動きを感じ取り、その能力に適応し、リラックスから強い努力まで行動を促します。著者らは、こうした相互作用に近づくには、ロボットが人間の運動計画やどれだけ努力を払う意志があるかを明示的にモデル化する必要があると主張します。
ヒューマン—ロボット相互作用をゲーム理論で見る
研究者たちは戦略的相互作用の数学であるゲーム理論に基づき、人間とロボットを同じ課題を共有する2人の「プレーヤー」として扱います。それぞれに目標があり:人間は望ましい動きを追跡しつつできるだけ少ない努力で済ませたいと考え、ロボットは動作追従を助けつつ人の努力を減らしたいと望みます。重要なのは、双方が実際の人の運動計画に合わせて約1〜2秒という有限の短い将来だけを見ていると仮定する点です。このウィンドウ内で、研究チームはナッシュ均衡の簡潔な式を導きます:どちらも相手が変わらない限り自分の成果を改善できない、力のバランスしたパターンです。この均衡が各瞬間に誰がどれだけ押すべきかを定義します。
人間の意図を読み取るようロボットを教える
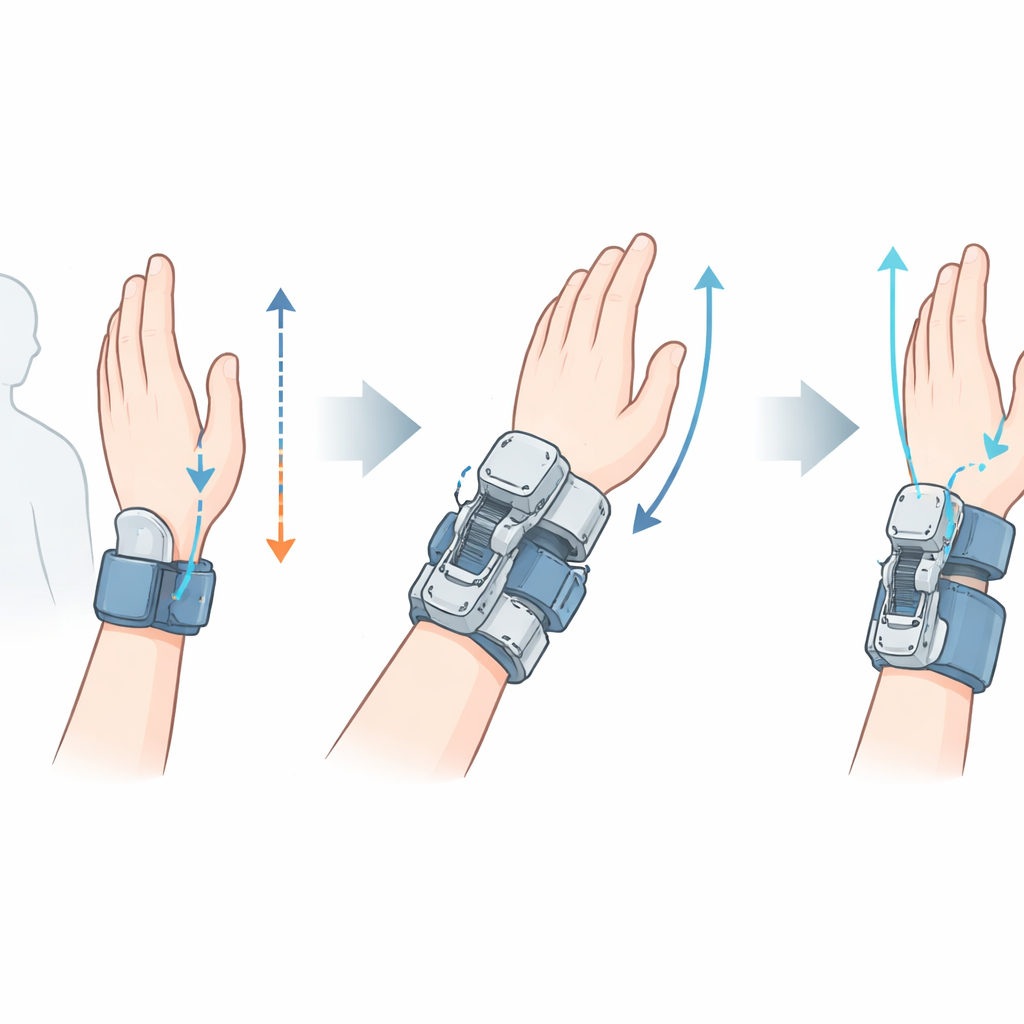
ロボットがこの「運動ゲーム」をプレイするには、まず人が精度と努力のどちらをどれだけ重視しているかという、個人差や時間変化のある隠れた嗜好を推定しなければなりません。著者らは逆ゲーム(inverse game)のアプローチでこれを解決します。人が動くとき、センサが関節角や出力トルクを測定します。コントローラはその動きと力の最近の履歴を最もよく説明する人間の嗜好の組を繰り返し探索します。その嗜好が得られれば、人が次の短いホライズンでどう行動しそうかを予測し、ロボットの最適な補助力を計算します。これらはすべて、被験者が手で動く目標を追跡するのを助ける手首用外骨格でリアルタイムに動作します。
人とロボットは協調を学ぶ
チームは30人の健常成人を対象に3つの実験でコントローラを検証しました。第1実験では、被験者に能動的に目標を追うフェーズと受動的にいるフェーズを切り替えてもらいました。コントローラはその人が精度をどれだけ重視しているかの内部推定を素早く調整し、能動期に上昇し、リラックス時にはほぼゼロまで下がりました。第2実験では、参加者はロボット補助あり・なしの試行を交互に行いました。新しいコントローラにより、ロボットは人間の関節の努力と筋活動を低減しつつ追跡精度を向上させました。繰り返しの試行で、各人の相互作用パターンは安定した個人ごとの「均衡」に落ち着き、人間とロボットの力の相関が増した—相互理解が深まった証拠です。第3実験では、研究者らは単一の補助ノブ、すなわちロボットが人の努力をどれほど減らそうとするかを変えるメタパラメータを導入しました。このノブを回すと、人が選ぶ努力量が滑らかに変化し、課題の性能は損なわれませんでした。
1つのダイヤルで行動を操る
補助のメタパラメータにより、デザイナーは1つの制御で相互作用スタイルのスペクトラムをカバーできます:ほとんど助けない状態から、力を等しく分担する状態、そしてロボットが主導して人がリラックスできるほぼ完全な支援まで。中間設定では、人とロボットが最もよく協調し、各々がほぼ半分ずつ負担する傾向がありました。推定された人の嗜好のパターンは、ほとんどすべての補助レベルで各人ごとに一貫していました。例外はロボットがほぼすべてを行う場合で、その時は人々がほとんど関与をやめるため行動が均一化しました。これはロボットが個々の制御スタイルを明らかにすると同時に、それらを穏やかに誘導できることを示しています。例えば、訓練のある段階ではより多くをユーザにさせ、別の段階では少なくさせるといったことが可能です。
リハビリや作業にとっての意味
一般の人にとっての要点は、このコントローラがロボットを硬直した機械というより賢いパートナーのように振る舞わせるということです。私たちの動きの意図を予測し、助ける量を調整することで、必要なときに努力を減らし、有益なときにはより頑張らせ、動作を正確かつ安定に保つことができます。同じ数学的枠組みは、リハビリでは徐々に努力をロボットから患者へ移すよう調整でき、協働製造では人とロボットが荷重を安全かつ効率的に共有するように調整できます。要するに、人は「同じゲーム」をするロボットに自然に適応するため、より個別化されターゲットを絞ったインタラクティブ支援への道が開けるのです。
引用: Hafs, A., Farr, A., Verdel, D. et al. Model predictive game control for personalized and targeted interactive assistance. Commun Eng 5, 57 (2026). https://doi.org/10.1038/s44172-026-00605-8
キーワード: ヒューマンロボットインタラクション, 外骨格アシスト, ゲーム理論に基づく制御, 運動リハビリテーション, 共有制御