Clear Sky Science · ja
時間変化する多層媒質環境における機械学習支援のリアルタイム音響トラッピング:磁気共鳴画像法(MRI)誘導によるマイクロバブル操作に向けて
音と画像で小さな薬物運搬体を導く
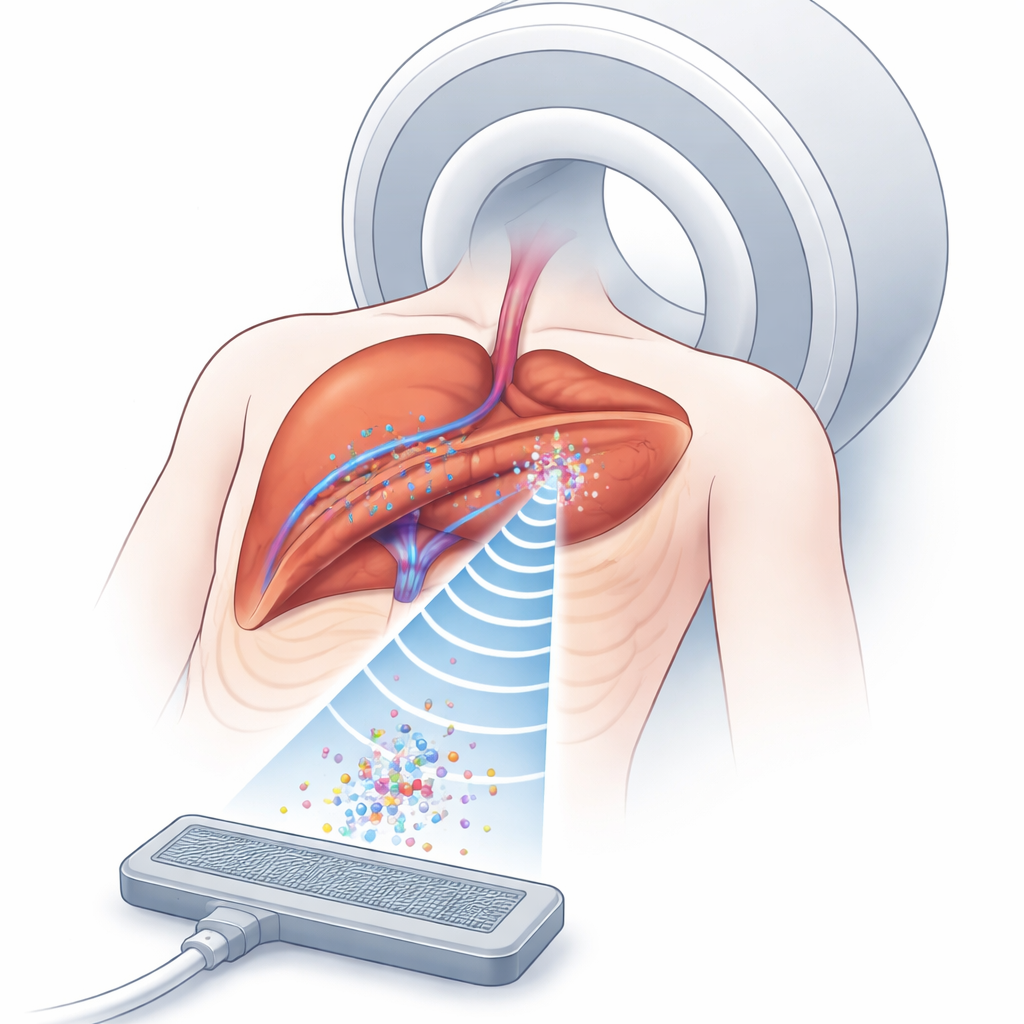
現代のがん治療は、健康な組織を守りながら腫瘍に薬剤を直接運ぶスマートな薬物運搬体にますます依存しています。本研究は、超音波による「トラップ」を磁気共鳴画像法(MRI)で誘導することで、体内のそのような運搬体を操る未来的な方法を探ります。音波、医療画像、機械学習を組み合わせることで、呼吸に伴って体が動いても、腫瘍の近くに微視的な薬物バブルを留めておくことを目指します。
マイクロバブルのトラッピングが重要な理由
薬を運ぶマイクロバブルは血管を通って移動し、超音波で誘発されると薬剤を放出できます。課題は、これらのバブルを十分な量だけ正しい場所に、深部で十分な時間留めておくことです。超音波は目に見えない力のポケット(音響トラップ)を作り、接触せずに小さな物体を流体中に保持できます。一方MRIは、臓器内部でも組織と超音波の影響パターンの両方を可視化できます。これら二つの手段を組み合わせれば、薬剤単体よりも精度よく腫瘍周辺に薬物運搬体を集中させる手段が得られます。しかし実際の人体では脂肪、筋肉、臓器、呼吸する肺など異なる組織が音波を屈折・歪ませるため、正確な腫瘍位置で安定したトラップを形成・維持するのは非常に困難です。
動く多層体の問題
空気や水のような単純な環境では、技術者は位相配列を用いた超音波エミッタのアレイで微小物体を押したり引いたり回転させたりする方法を既に知っています。しかし体内では、音波は異なる密度や速度を持つ複数の層を越えて進み、それらの境界で屈折や歪みが生じます。従来の計算手法は原理的には各エミッタから標的点までの音波の伝播時間を計算して補正できますが、そのためには体を数百万の小さなブロックに分割して波の伝播を逐次的にシミュレートする必要があり、非常に時間がかかります。また、これらの手法は組織がほぼ完全に静止している場合にのみ有効です。呼吸だけでも腹部組織を数ミリ移動させ、事前に計算した解をすぐに無効化してしまいます。
音の経路を予測するモデルを教える
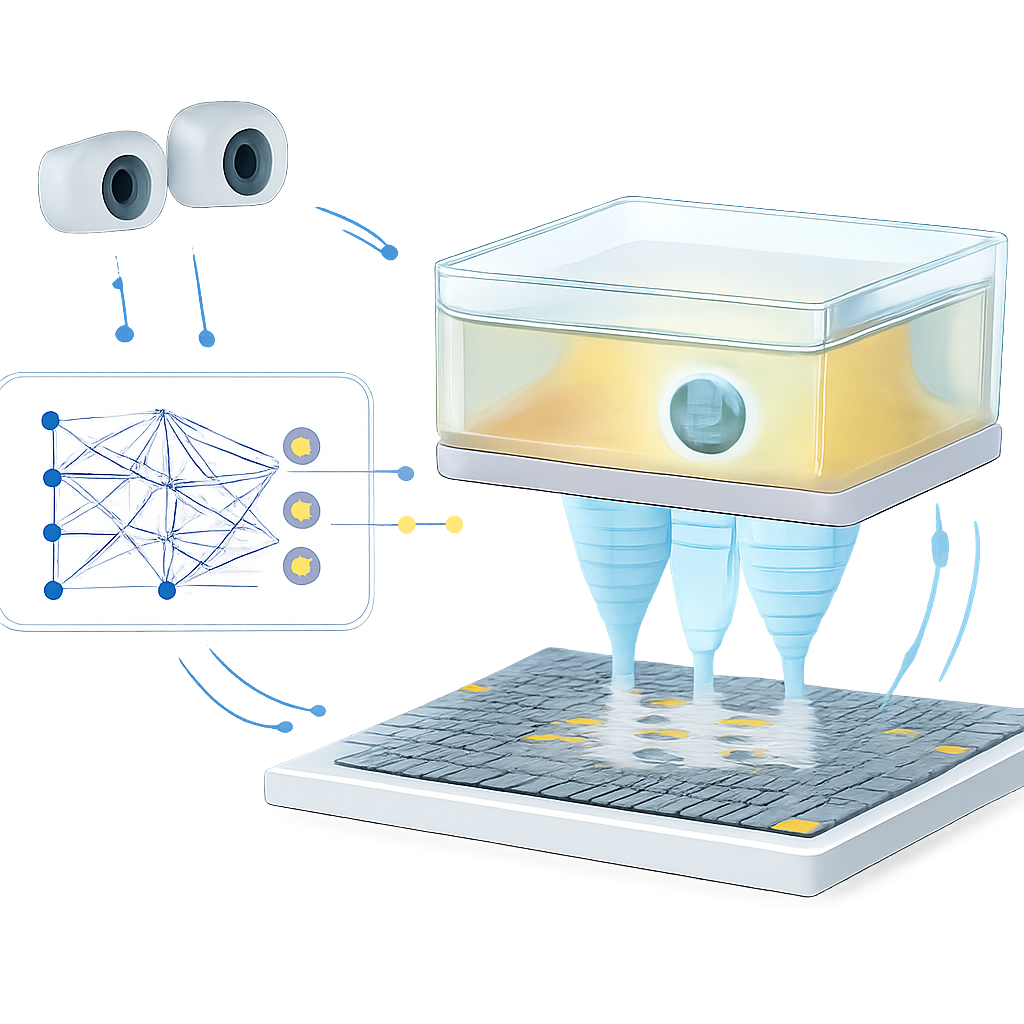
著者らは、このボトルネックに対して学習ベースのモデルを用いることで高速な近道を構築しました。波のシミュレーションを毎回行う代わりに、ニューラルネットワークに各超音波パルスが標的点に届くまでの所要時間を予測させます。まず、薄いプラスチック膜で空気と隔てられたガス充填チャンバーのような詳細な仮想環境を構築し、異なる組織層を音がどのように通過するかを模倣しました。物理ベースのシミュレータを用いて、多数の標的と14×14の超音波アレイ間の音の伝播時間の訓練データを生成します。さらに、チャンバーを二方向に移動させて動きを模倣し、その位置を将来のMRI可視マーカーが患者の呼吸を追跡するように、三つの視覚マーカーで記述します。学習済みネットワークは、目的とするトラップ位置とチャンバーの位置を入力として、196個のエミッタ全てに必要なタイミングパターンを直接出力することを学び、約26ミリ秒でマイクロ秒レベルの精度を達成します。
ビジョンと高速更新による閉ループ
速度だけでは不十分であり、環境が予期せず変化した際にトラップが適応する必要があります。その実証のために、チームは閉ループ制御システムを構築しました。ステレオカメラが、移動するチャンバー内で音響トラップによって浮遊している小さなポリスチレンビーズを監視します。ビーズが設定した閾値以上に目標から逸れたとき、システムは目標位置を修正し、更新された座標とチャンバーの姿勢を学習モデルに送り、位相パターンを迅速に更新します。実験では、システムは位相パターンを1秒あたり最大15回更新でき、ビーズをH字、K字、U字の経路に沿って平均約1ミリの誤差で誘導しました。これはいくつかの臨床用集束超音波システムの位置決め精度に匹敵します。同じフィードバック原理は、チャンバーが動いたときにビーズが意図した場所から逸れる時間を短縮することも示しており、制御ループがプラスチック膜や支持構造からの未モデル化効果や運動を補償できることを示しています。
将来の治療にとっての意義
非専門家向けの核心は、研究者たちが一種の遠隔操作可能な非接触「トラクタービーム」を構築し、将来的には患者が呼吸しても薬剤を含むバブルを腫瘍近傍に停めておける可能性を示したことです。彼らの機械学習モデルは重いシミュレーションを高速な予測器に置き換え、カメラ(および将来的にはMRIマーカー)が体の動きを伝えてトラップを動的に再調整します。本研究は空気、ガス、プラスチックを用い、実際の組織ではなくプラスチックビーズを浮上させていますが、動的な多層媒質でのリアルタイム制御の実現を示しています。より強力なハードウェア、高い超音波周波数、MRIベースの動作追跡が組み合わされば、このアプローチはMRI誘導のロボット支援超音波治療として、体深部へより正確かつ安全に薬剤を届ける臨床ツールへと発展する可能性があります。
引用: Wu, M., Li, X. & Tang, T. Machine learning-facilitated real-time acoustic trapping in time-varying multi-medium environments toward magnetic resonance imaging-guided microbubble manipulation. Commun Eng 5, 52 (2026). https://doi.org/10.1038/s44172-026-00600-z
キーワード: 音響トラッピング, MRI誘導治療, マイクロバブル薬物送達, 超音波における機械学習, 非侵襲的ロボット操作