Clear Sky Science · ja
合成X線駆動による微小医療機器の追跡と制御
より小さな器具、より安全な手術
外科医は今、小さくてコードのない医療機器を使い始めています。これらは血管やその他の狭い通路を這うように移動して薬剤を投与したり、詰まった動脈を開通させたり、体内深部から生体情報を測定したりできます。こうした微小医療機器は、より侵襲の少ない処置と速い回復を約束しますが、それは医師がリアルタイムで安全に位置を把握し操作できる場合に限られます。本稿ではMicroSyn-Xを紹介します。X線画像上でこれらの小さな機器を追跡するコンピュータを訓練する新しい手法で、より精密で侵襲の少ない手術への道を開きます。
見えない助っ人の問題点
現在の手術用画像の主力はX線透視で、骨や血管、器具の動く影をモニターに映します。しかし微小機器は非常に小さく薄いため、しばしばノイズの多い背景に埋もれてしまいます。骨や金属器具、造影剤に隠れることもあり、柔らかいロボットや液体ロボットは動くたびに形を変えます。人が画面を監視しながら磁石やカテーテルを手で操作する必要があり、それは遅く疲れやすく、ミスのリスクを伴います。コンピュータビジョン、つまり自動で「見る」ソフトウェアが役立つ可能性はありますが、通常は大量の注意深くラベル付けされた画像が必要です。これらの新しい機器に対するそうしたデータセットはほとんど存在せず、収集は費用がかかり時間もかかり、患者のプライバシーにも制約されます。
偽だが忠実なX線でコンピュータを教える
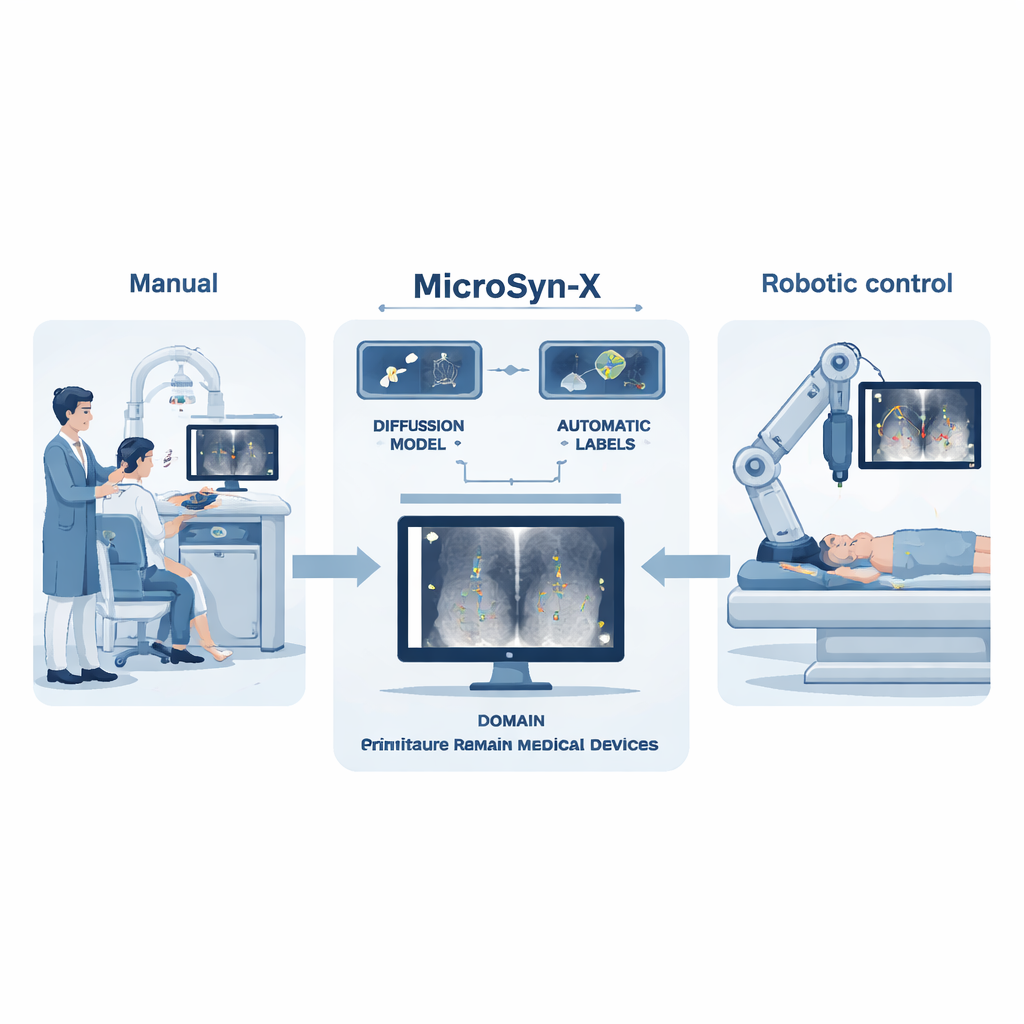
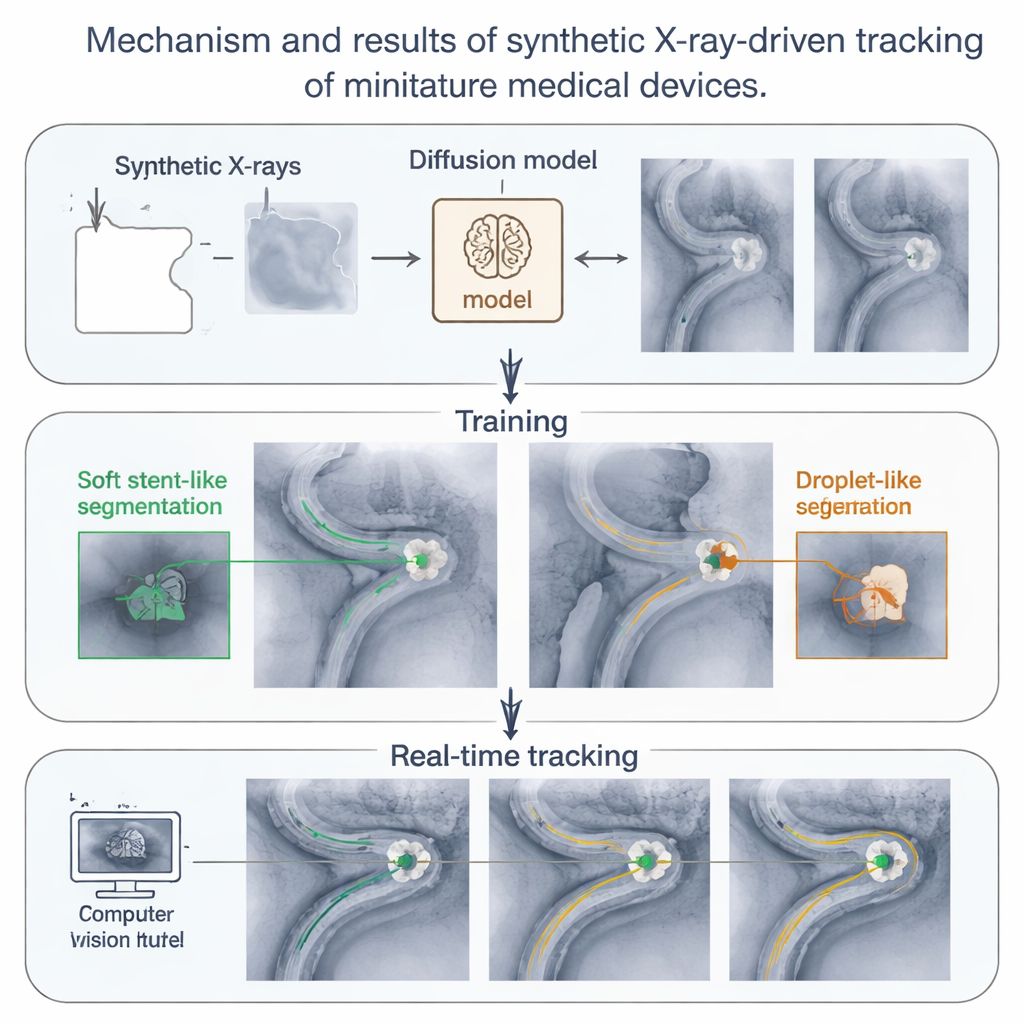
MicroSyn-Xはこのデータボトルネックに対し、高度に現実的なX線画像を自ら作成し、学習アルゴリズムに各機器の正確な位置を示すラベルを付与することで対処します。まず、拡散モデルと呼ばれる最新の画像生成器を用いて、臓器、骨、手術器具の生き生きとしたX線背景を、簡単なプロンプトと組織・金属・液体の通路を大まかに示すマスクで導きながら生成します。次に、微小機器の画像(白バックで一度撮影したものや、液滴の場合は数学的に描いたもの)をこれらのシーンにデジタル合成して、まるで体内にあるかのように見せます。コンピュータが各機器の配置を正確に知っているため、アウトラインやバウンディングボックスを自動生成でき、面倒な手動ラベリングを排除します。
制御された混沌で実世界に備える
MicroSyn-Xの重要な工夫は「ドメインランダマイゼーション」で、合成画像に意図的な多様性を注入します。システムは自動で臓器形状や機器位置、明るさ、ノイズレベル、さらには骨や器具による隠蔽の程度まで変化させます。液体ロボットについては、伸びたり群れに分裂したり再結合したりする多様な形状も多数生成します。学習アルゴリズムに何千ものわずかに異なる状況——実患者では稀だったり現実的に取得しにくいケースを含む——を提示することで、モデルは表層的なパターンではなく機器の本質的な視覚手がかりに注目するよう訓練されます。評価では、これら合成画像のみで訓練したモデルが、低コントラスト、高ノイズ、強い遮蔽といった困難な状況で、実際のX線で訓練したモデルに匹敵またはそれを上回る性能を示しました。
画面から手術室のロボットへ
研究者たちはソフトウェアの実証に留まらず、MicroSyn-Xをロボットシステムに直接接続しました。ロボットアームが組織近傍に強力な磁石を保持し、Cアーム透視装置がX線画像を取得します。MicroSyn-Xで訓練したビジョンモデルは、各フレームで軟らかいステント状ロボットや液滴を検出し、追跡アルゴリズムがこれらの検出を滑らかな軌跡に繋ぎます。機器が一時的に骨の背後に消えても追跡を保ちます。このフィードバックを用いてロボットはねじれた人工血管、体外の実動物臓器、ウサギやラットの生体動脈内を機器で誘導しました。複数機器を同時に操縦し、分岐する血管をたどり、磁場で分裂・合流する液滴群れをリアルタイムで監視することにも成功しています。いずれも困難な撮像条件下での成果です。
より賢く、より低侵襲な医療へ
簡単に言えば、本研究はコンピュータが希少な実データの代わりに大量の精巧に作られた「偽」X線で練習することで、体内の小さな外科器具を安全に追跡することを学べることを示しています。MicroSyn-Xは合成画像をロボティクスの実用的なエンジンに変え、現実的な訓練データを作り、ビジョンモデルを教育し、その出力を既に生体動物で機能している磁気ナビゲーションシステムに供給します。これらの手法が成熟しより複雑な症例で試験されるにつれて、外科医が微妙な処置をより正確に、より少ない負担で行えるようになり、微小ロボット群が体内から静かに治療を改善する未来に近づく可能性があります。
引用: Wang, C., Kang, W., Sun, M. et al. Synthetic X‑ray‑driven tracking and control of miniature medical devices. Nat Mach Intell 8, 276–291 (2026). https://doi.org/10.1038/s42256-026-01190-3
キーワード: 微小医療機器, X線画像, 合成データ, 医療ロボティクス, コンピュータビジョン