Clear Sky Science · ja
1024段階のコンダクタンスを備えたMoS2メムトランジスタと統合されたセンサ融合のための多段カルマンフィルタリングシステム
より賢いセンシングで自動運転車をより安全に
現代の自動運転車は道路を把握するために多数のセンサーに頼っていますが、それらの情報を迅速かつ効率的に統合するのは非常に難しい作業です。本研究は、メムトランジスタと呼ばれる新型の微小電子デバイスが、その統合プロセス(センサ融合)を高速化・簡素化できることを示しています。主要な計算を大型のデジタルチップから軽量なアナログハードウェアに移すことで、研究者たちは消費エネルギーと遅延を大幅に削減し、悪天候や視界の遮蔽、混雑した道路にも対応できる、より安全で応答性の高い自動運転システムへの道筋を示しています。
多くの目が一つより優れている理由
今日のテストコースや高速道路で、自律走行車はカメラ、レーザー測距(LiDAR)、ミリ波レーダー、そして車両の動きを追うモーションセンサーを組み合わせて外界を観測しています。それぞれに長所と短所があり、LiDARはトラックや建物で遮られることがあり、レーダーは細部の検出が苦手で、モーションセンサーは単独では徐々に誤差が蓄積します。周囲の交通の信頼できる像を得るには、これら不完全な観測を一つの一貫した推定に融合する必要があります。カルマンフィルタという数学的手法はリアルタイムでこれを実現するための有力な道具となっていますが、従来の形ではアナログのセンサーとデジタル論理の間でデータを何度もやり取りするデジタルプロセッサ上で動作するため、消費電力が増え遅延を招きます。

新しいタイプの電子ビルディングブロック
研究チームはモリブデン二硫化物(MoS2)の単原子層で作られたデバイスを用いてこの問題に取り組みます。彼らのメムトランジスタは、メモリ素子とトランジスタの役割を三端子構造で併せ持ち、その電気伝導度を滑らかに調整して電源を切っても保持できます。原子格子中の微小な空孔を電場で精密に制御することで、デバイスは広い範囲にわたり1024段階の異なる伝導度を信頼性高く保持でき、1年以上その状態を保つことが可能です。同様に重要なのは、制御電圧を掃引した際にこれらのレベルがほぼ直線的に変化することで、カルマンフィルタで必要とされる数学的な重みをメムトランジスタの物理的設定に直接対応させることが可能になる点です。
数学をハードウェアに変える
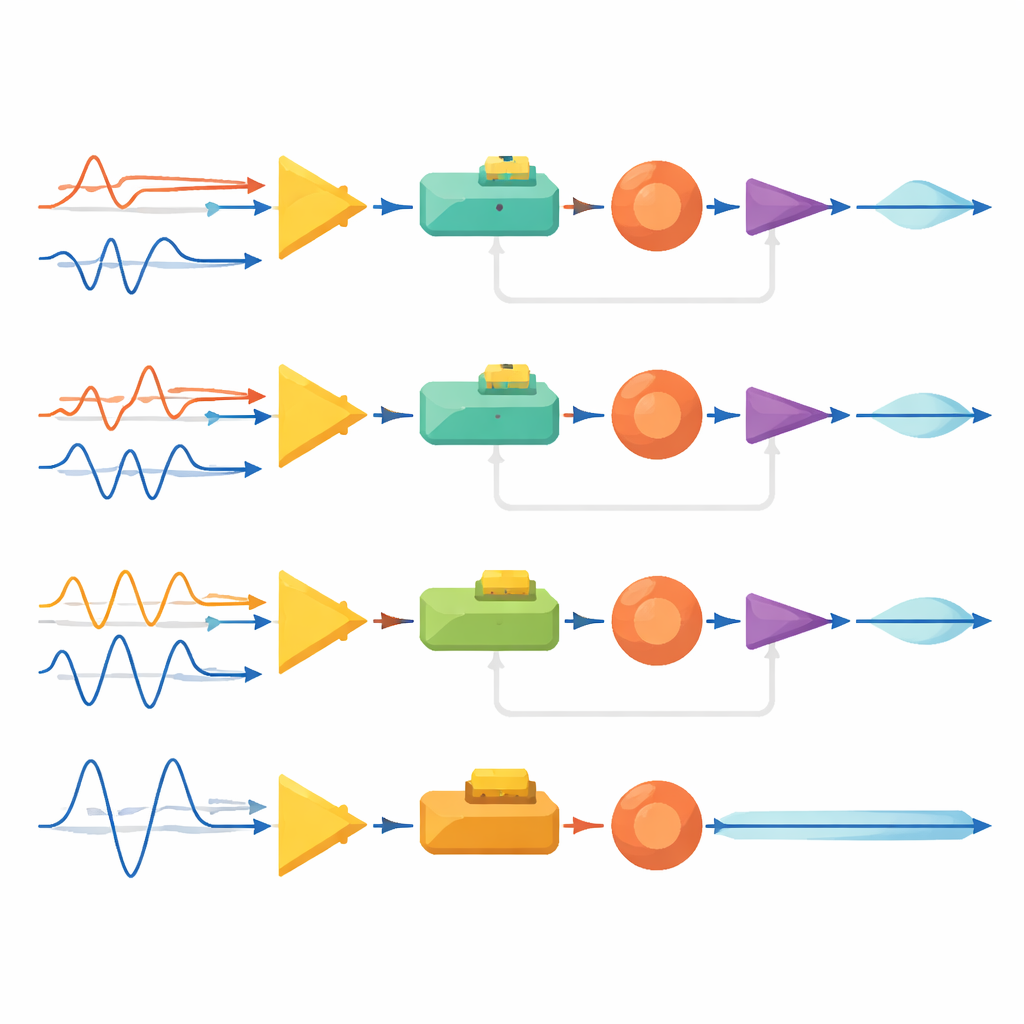
このデバイスを基盤に、研究者たちはセンサの電圧上で直接動作する多段カルマンフィルタのアナログ版を設計しました。回路は車両の位置、速度、加速度を推定する三つの連結された段階で構成されます。各段階内では、差分、積分、加算、微分といった基本演算がコンパクトなアナログモジュールによって実行されます。フィルタが新しいセンサー読み取り値をどれだけ信頼するかを決める重要な“ゲイン”因子は、メムトランジスタの伝導度で実装されています。ゲート電圧を調整するだけで、ソフトウェアを書き換えることなくLiDAR、レーダー、モーションセンサーのどれをどれだけ重視するかを滑らかに変更できます。
走行シナリオと厳しい条件
実際の動作を示すために、チームはMoS2デバイスと標準的なアナログ部品を載せた回路基板上で完全な三段フィルタを実装しました。彼らは、高速道路での車線変更を伴う追い越し操作中にLiDAR、レーダー、モーションセンサーが観測するであろう現実的でノイズを含む信号を入力しました。信号が各段階を流れるにつれて出力はよりクリーンになり、位置・速度・加速度の一貫した推定が得られ、安全に重要な急ブレーキなどの鋭い変化も保持されます。特に印象的なのは、例えばトラックが一時的にLiDARから車両を隠してしまい一つのセンサーが信頼できなくなった場合です。ハードウェア側でその劣化したセンサーに対応するゲインを下げることで、アナログフィルタは自動的に残りの入力と過去の運動パターンを重視するようシフトし、速度や加速度の推定を滑らかで物理的に妥当なものに保ちます。
機械のためのより高速で軽量な「脳」
同じフィルタリングタスクを標準的なデジタル実装と比較すると、メムトランジスタベースのアナログシステムは約13倍少ないエネルギーで動作し、計算を約59倍速く完了し、同時に三つの主要な運動変数を扱います。デバイスはコンパクトで安定しており大規模製造と互換性があるため、この手法はカメラやレーダーの近くに配置できる「インセンサー」や「ニアセンサー」処理ブロックの将来を示唆します。専門外の読者への要点は、高度な材料の物理特性に数学の一部を担わせることで、エンジニアはより賢く、より速く、より効率的な電子的“脳”を構築でき、それによって視界が完璧でない状況でも自律システムが信頼性をもって走行できるということです。
引用: Tan, T., Guo, H., Wang, S. et al. Multi-stage Kalman filtering system for sensor fusion integrated with MoS2 memtransistor featuring 1024 conductance levels. npj 2D Mater Appl 10, 31 (2026). https://doi.org/10.1038/s41699-026-00672-7
キーワード: 自動運転, センサ融合, カルマンフィルタ, メムトランジスタ, アナログ計算