Clear Sky Science · ja
UAVによる構造健全性検査における効率的なひび割れ分類のためのTinyMLパイプライン
空に漂う、より賢い目
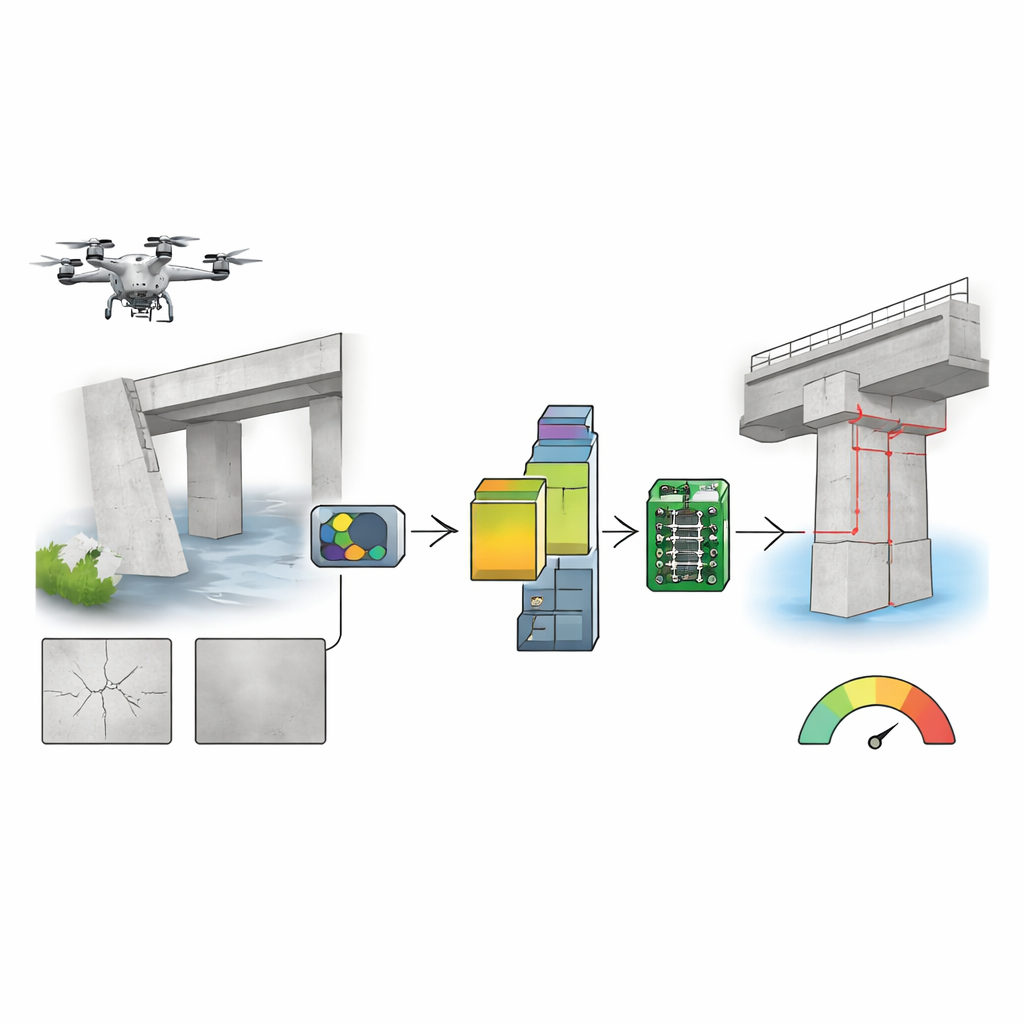
橋梁やダムなどの重要構造物は人間と同じように経年劣化し、小さなひびが将来の破壊を示す初期の警告であることがあります。技術者たちはこうした表面を撮影するために小型ドローンをますます活用していますが、現在は多くの画像を遠隔サーバーに送って解析する必要があり、バッテリー消費が増え、データのプライバシーが懸念されます。本稿は、ひび割れ検出の「頭脳」をドローンに搭載できるミリワット級の小型チップにまで縮小する方法を探り、検査をより速く、安全で、効率的にするアプローチを示します。
なぜひび割れが重要か
従来の構造健全性の監視法は、コンクリートや鋼材にボルトや接着で取り付ける接触型センサーに頼ることが多く、設置コストが高く、損傷が進行してから問題を検出しがちです。目視検査はより直接的な情報を与えますが、足場に人を乗せたり車線内で点検したりするのは遅くリスクが伴い、主観的になりやすい。カメラを搭載した小型無人航空機(UAV)は、橋面や壁を素早くスキャンして数千枚の高詳細写真を取得し、微細なひびを明らかにする有望な手段を提供します。しかし、ドローンはバッテリー容量が限られ、通信が不安定になることが多いため、取得した大量のデータをどう扱うかが課題になります。
すべてをクラウドに送る問題点
現在の多くのシステムは「エッジで取得→クラウドで推論」というパターンを採っています。ドローンは単なる飛行カメラとして動作し、画像を遠隔の高性能コンピュータへストリームして、そこにあるディープラーニングモデルがコンクリートの各領域にひびがあるかどうかを判定します。計算の観点では理にかなっていますが、重大な欠点も伴います。高品質な画像のストリーミングはドローンのバッテリーを著しく消耗し、飛行時間を大幅に短くします。無線リンクが切断または弱まれば、検査ミッションがまさに不都合な瞬間に停滞する恐れがあります。さらに、重要インフラの詳細画像を遠隔サーバーに送ることは、プライバシーやセキュリティの観点からも懸念を招きます。こうした問題が、デジタル腕時計程度の計算力しかないハードウェア上に知能を載せるという別のアプローチの動機となっています。
頭脳を小さなチップに収める
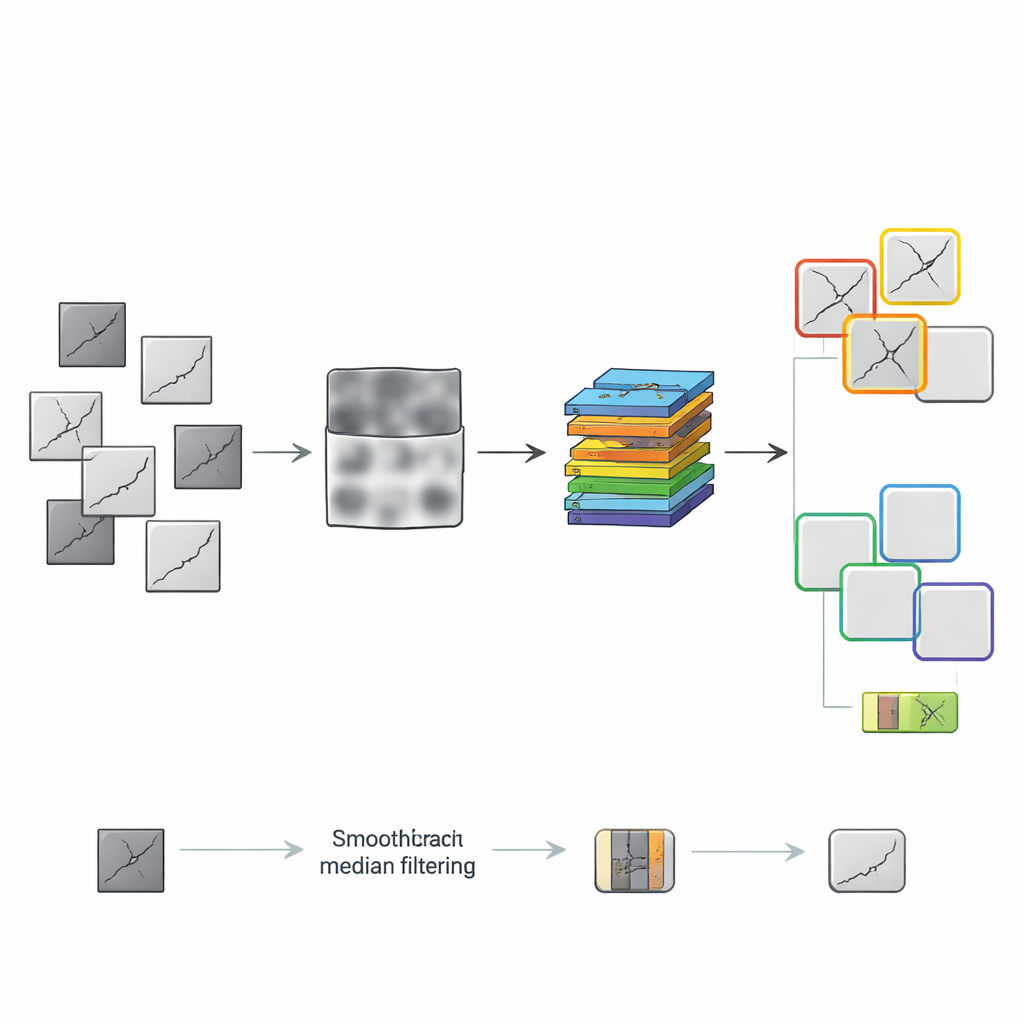
著者らは、低消費電力マイクロコントローラSTM32H7上で動作するエンドツーエンドのパイプラインを構築し、MobileNetV1x0.25というコンパクトなニューラルネットワークを用いました。新しいモデルを発明する代わりに、画像の前処理やモデルの圧縮といった周辺部分に注力しています。50,000枚を超えるコンクリート画像から成る広く研究されたデータセットを、ひびあり/ひびなしにラベル付けした小さなパッチに分割し、こうしたパッチを小型モデル向けに準備するさまざまな方法を学習・評価しました。一つの経路では、グレースケール化、コントラスト強調、ノイズ除去、平滑化、最終的に二値化して白黒のシルエットにする、といった手作業の一連の処理を採りました。別の経路では、性能が改善する組み合わせを常に保持する「貪欲(グリーディ)」探索によって前処理チェーンを段階的に構築させました。
パイプラインの最適点を見つける
テストの結果、処理を増やせば常に良くなるわけではないことが明らかになりました。厳しい二値化で終わる手作業のパイプラインは、ネットワークにとって有害で、微妙な陰影を剥ぎ取り、モデルが微細なひびを認識するために必要な情報を失わせていました。対照的に、貪欲探索はより単純な2ステップ、すなわちグレースケール変換とメディアンフィルタによる穏やかなノイズ平滑化が最良であることを見つけました。これに加え、著者らはモデルを圧縮する4つの方法を体系的に検討しました:全精度から8ビット整数への数値変換、量子化を想定して学習する量子化認識学習、重要度の低い重みの枝刈り(プルーニング)、類似重み値のクラスタリングです。これらを単独および組み合わせで試行し、マイクロコントローラにデプロイして、精度だけでなくメモリ使用量、処理時間、1決定あたりのエネルギー消費を測定しました。
小さなコンピュータ、高い性能
総合的に最良だった構成は、グレースケール変換+メディアンフィルタの入力に対して、プルーニングと量子化認識学習を組み合わせた8ビット形式のモデルを与えるものでした。このコンパクトな構成は、実際のひびを見逃さず誤検出を避けるバランスを示すF1スコアで0.938を達成し、従来のオンデバイスひび割れ検出器に比べて11ポイント以上の向上を示しました。同時に、作業用メモリは約2.9メガバイト、プログラム領域は309キロバイト、各画像パッチの処理時間は0.5秒未満に抑えられました。各判定のエネルギー消費は約0.6ジュールです。これをDJI Mini 4 Proドローンに搭載して継続的に動作させても、飛行時間の短縮は約4%にとどまり、一般的に重いエッジコンピューティングボードが消費する約25%に比べ格段に少ない負荷です。
実地検査への意味
非専門家向けの要点は、真剣な構造評価がもはや機密画像を遠方のデータセンターに送ることや、かさばり消費電力の大きなコンピュータを空へ持ち上げることを必要としない、ということです。画像のクリーニング方法やニューラルネットワークの圧縮を慎重に調整することで、親指サイズのチップがドローンのバッテリーをほとんど消費することなくコンクリートのひびを確実に検出できることを著者らは示しました。システムは運動によるブレや照明変化に対して合理的に堅牢であり、ひびが稀な健全領域が多い状況でも妥当な振る舞いを示します。こうした成果は、スウォームで配備された小型で安価なUAVが、スマートで効率的なオンボード知能を使ってインフラを静かに巡回し、早期に異常を発見する未来に近づけるものです。
引用: Zhang, Y., Nürnberg, A., Rau, L.S.M. et al. TinyML pipeline for efficient crack classification in UAV-based structural health inspections. Sci Rep 16, 8964 (2026). https://doi.org/10.1038/s41598-026-43534-4
キーワード: ドローン点検, コンクリートひび割れ, Tiny Machine Learning, 構造健全性モニタリング, エッジAI