Clear Sky Science · ja
ドメインに依存しない弱教師あり外科器具セグメンテーション
外科器具を賢く捉えることが重要な理由
現代の外科医は、カメラや顕微鏡、先進的なスキャナの助けを借りて手術を行うことが増えています。ロボットの誘導、3Dビューの整合、あるいは特定の画像から器具を隠すためには、コンピュータが各フレーム内のすべての外科器具を確実に検出する必要があり、これをセグメンテーションと呼びます。今日では通常、医療専門家による数千枚のピクセル単位の注釈が必要で、それでも撮像条件や手技が変わるとシステムが壊れやすいという問題があります。本研究は、事前にすべての器具を詳細に描くことなく、強力なビジョンモデルが非常に異なる種類の医用画像でも器具を見つけられる方法を提示します。
多様な画像で器具を見つける難しさ
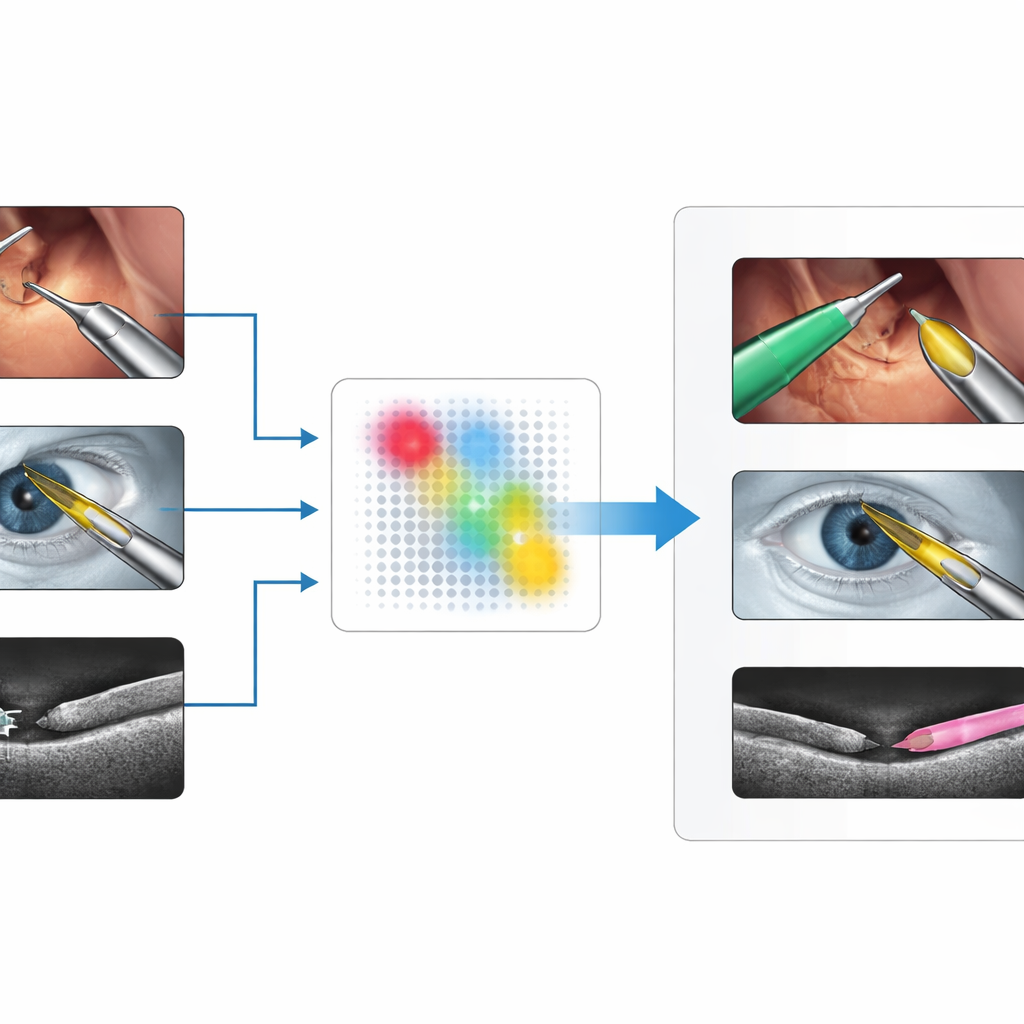
外科医はさまざまな撮像システムを使用します:腹腔内の腹腔鏡カメラによるカラー動画、白内障手術中の眼の顕微鏡画像、光干渉断層撮影(OCT)や超音波のような断面スキャンなどです。それぞれの画像で器具は大きく見え方が異なります—カラー画像では光る金属棒、OCTでは細い明るい線や三日月状のもの、超音波では斑点状の塊に見えることもあります。既存の深層学習手法は非常に高い性能を発揮しますが、特定の環境で注意深くラベル付けされた大規模データセットで訓練された場合に限られます。撮像装置、解剖学、器具の種類が変わると性能は急落しやすく、新たな注釈を集めるのは遅く高価で、プライバシーや専門性の制約もあります。
新しい発想:器具を場違いの物体として扱う
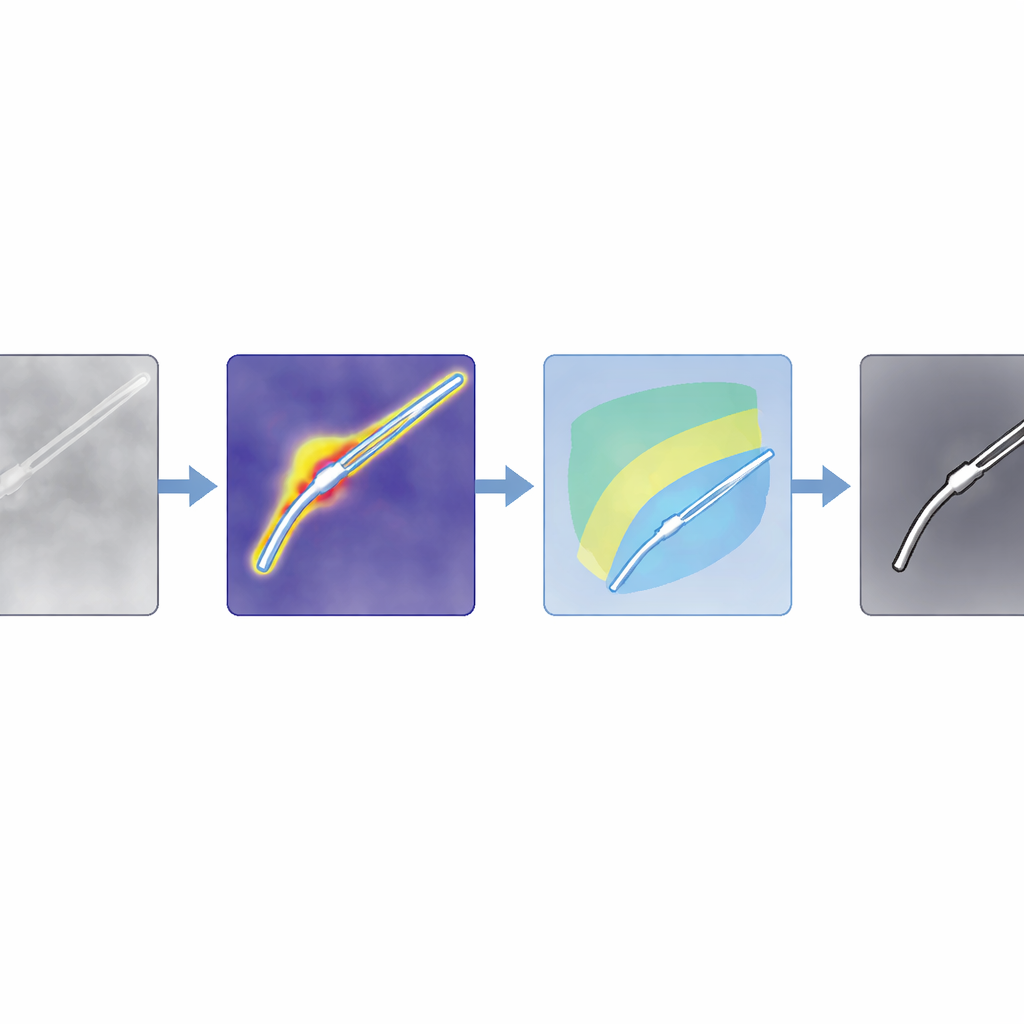
著者らはSAM4SISと呼ぶ手法を提案し、発想を逆転させます。システムにあらゆる器具の見た目を逐一教える代わりに、まず器具のない画像を見せて「正常な」組織の見た目を学習させます。彼らはPatchCoreという異常検知器を用いてこれらの正常パターンのメモリを構築します。新しい画像が来ると、PatchCoreはこのメモリに合致しない外観の領域を強調します—つまり外科器具が含まれている可能性が高い領域です。このステップには器具の存在があるかないかという画像レベルの単純な情報だけが必要で、輪郭をピクセル単位で描く必要がないため準備が格段に容易になります。
粗い手がかりから精密な輪郭へ
異常マップは粗いので、チームはこれを強力なファンデーションモデルであるSegment Anything Model 2(SAM2)と組み合わせます。SAM2は対象物の内部に点が与えられると鋭い輪郭を描けます。重要な工夫は、その点を人間にクリックさせるのではなく異常マップから自動的に選ぶことです。著者らは通常のカラー画像とOCTのような強度ベースのスキャンに合わせたフィルタを設計し、影や明るいアーティファクトを抑えつつ器具である可能性の高い領域を強調します。次に潜在的な器具領域にスコアを付け、最も強い点をSAM2へのプロンプトとして選びます。SAM2は複数の候補マスクを返すため、著者らはSAM4SISという新しい採点規則を導入し、各候補が異常ベースのマップとどれだけ一致するかを測り、最も適合するマスクを選びます。
多くの手術とスキャナで機能する
研究者らはこのアプローチを3つの要求の高いデータセットで評価しました:腹部ロボット手術の動画(EndoVis2017)、白内障手術の顕微鏡画像(CaDIS)、および小さな器具を含むブタ眼の断面OCTスキャン(PASO-SIS)。これらは視点、色、ノイズ特性が大きく異なります。大規模なセグメンテーションモデルを再訓練したり新しいマスクを描いたりすることなく、SAM4SISは境界精度スコアで約53%〜73%の範囲に到達し、テキストベースのプロンプト手法に匹敵、あるいは上回り、一部の教師ありシステムに迫ります。特に従来手法が苦手とするOCTや超音波データで良好に機能し、セットアップには1分未満しか必要としません。チームは同じ考え方で脳の超音波に映る綿球のような他の異物も強調できることを示し、この概念が器具に限定されないことを示唆しています。
将来のスマート手術にとっての意義
読者にとっての核心的なメッセージは、コンピュータがまず正常な組織の見た目を理解し、次に見慣れない形状を器具の可能性として検出し、それを汎用のビジョンモデルで精緻化することで、外科シーンの「未知のものをセグメントする」ことを学べるようになったという点です。この手法は大規模な注釈作業を回避し、異なる撮像技術に適応でき、最小限の準備で手術ワークフローに組み込めます。十分なラベル付きデータがある場合には注意深く訓練された専門モデルが依然として優れますが、SAM4SISは新しい手技、稀な撮像環境、初期段階の研究に対する実用的な代替案を提供し、堅牢な自動器具検出を日常の臨床現場に近づけます。
引用: Peter, R., Pham, D.X.V., Matten, P. et al. Domain-agnostic weakly supervised surgical instrument segmentation. Sci Rep 16, 9337 (2026). https://doi.org/10.1038/s41598-026-43054-1
キーワード: 外科器具セグメンテーション, 医用画像AI, 異常検知, ファンデーションビジョンモデル, ロボット外科