Clear Sky Science · ja
屋内再局所化と経路計画のための確率密度関数を用いた物体認識型意味地図
なぜ賢い屋内地図が重要なのか
家庭用やサービス用ロボットが研究室から実際の住居へ移るにつれて、単に壁や家具を避けるだけでは不十分になります。本当に役立つためには、ベッドがあれば寝室を示すことが多いとか、冷蔵庫があれば台所を示唆するといった理解が必要です。本論文は、部屋を特徴づける物体を通して屋内空間をロボットに「見せる」新しい方法を提示し、ロボットが自分の位置を推定し、人間の住まい方に即した経路を選べるようにします。
日常の物体を通して部屋を捉える
従来のロボット地図は、粗い幾何情報に注力するものと抽象的な記号に注力するものに分かれます。レーザースキャンから作るグリッド地図は詳細な形状を捉えますが、保存や探索に重く、ロボットの経路を不自然なグリッド状にしてしまいがちです。部屋やドアをノードとする高レベルなグラフは扱いやすいものの、精密な運転に必要な細部を失います。著者らは、このギャップを埋めるために、部屋とその中にある主要な静的物体(ベッド、ソファ、冷蔵庫、テーブルなど)を軸に地図を構成します。各部屋は平面図上に輪郭が描かれ、重要な物体クラスごとにレイヤーが割り当てられるため、異なる種類の家具が互いに上書きされることはありません。
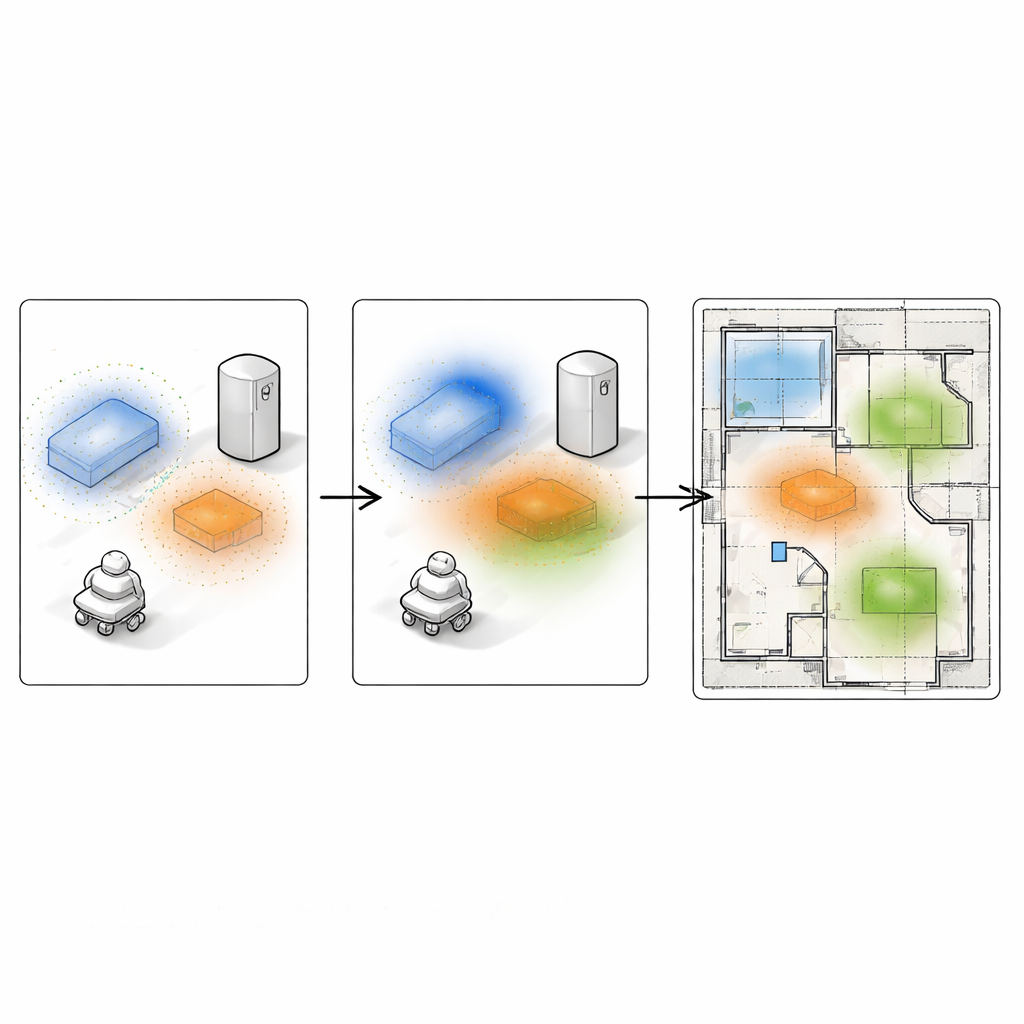
家具を柔らかな確率の雲に変換する
物体を硬いエッジの箱で表すのではなく、本手法は家具の3Dスキャンを床上の滑らかな“ヒートマップ”に変換します。まずロボットはRGB‑Dカメラと標準的なツールで各部屋を3D再構成し、壁やベッド、椅子などの物体に属する点群に意味ラベルを付与します。部屋内の各物体タイプについて、点群のクラスタを検出して床面に射影します。これらのクラスタから、連続的な確率密度を推定します—物体が最も存在しそうな場所で値が高く、外側に向かってゆるやかに減衰するソフトな塊です。物体タイプごとにこれらの塊を重ねることで、物体の意味とおおよその形状を保持しつつ、ノイズや部分的な視点の不完全さに自然に対処できる、コンパクトで階層化された地図が得られます。
ロボットが自分の居場所を再発見させる
この物体中心の地図の主要な用途の一つは、ロボットがフロアプラン上で自分の位置がまったくわからないときに再定位を助けることです。これはロボットが起動した直後や移動されたときに頻繁に起こります。ロボットは深度カメラで現在の視野を見直し、視界にある物体を検出して、その部分シーンに対する小さな確率塊の集合を生成します。次に進化的探索アルゴリズムが建物地図上の多くの可能なロボット姿勢を探索します。各候補姿勢について、局所的な塊を全体地図に重ね合わせ、その類似度を統計的距離で測定します。部屋の境界や可視線チェックは、壁越しに冷蔵庫が見えるといった不可能な姿勢を排除します。多くの世代を経て、候補姿勢の集団は観測された物体が保存された確率場と最もよく一致する位置へと収束し、ロボットの位置と向きの頑健な推定が得られます。
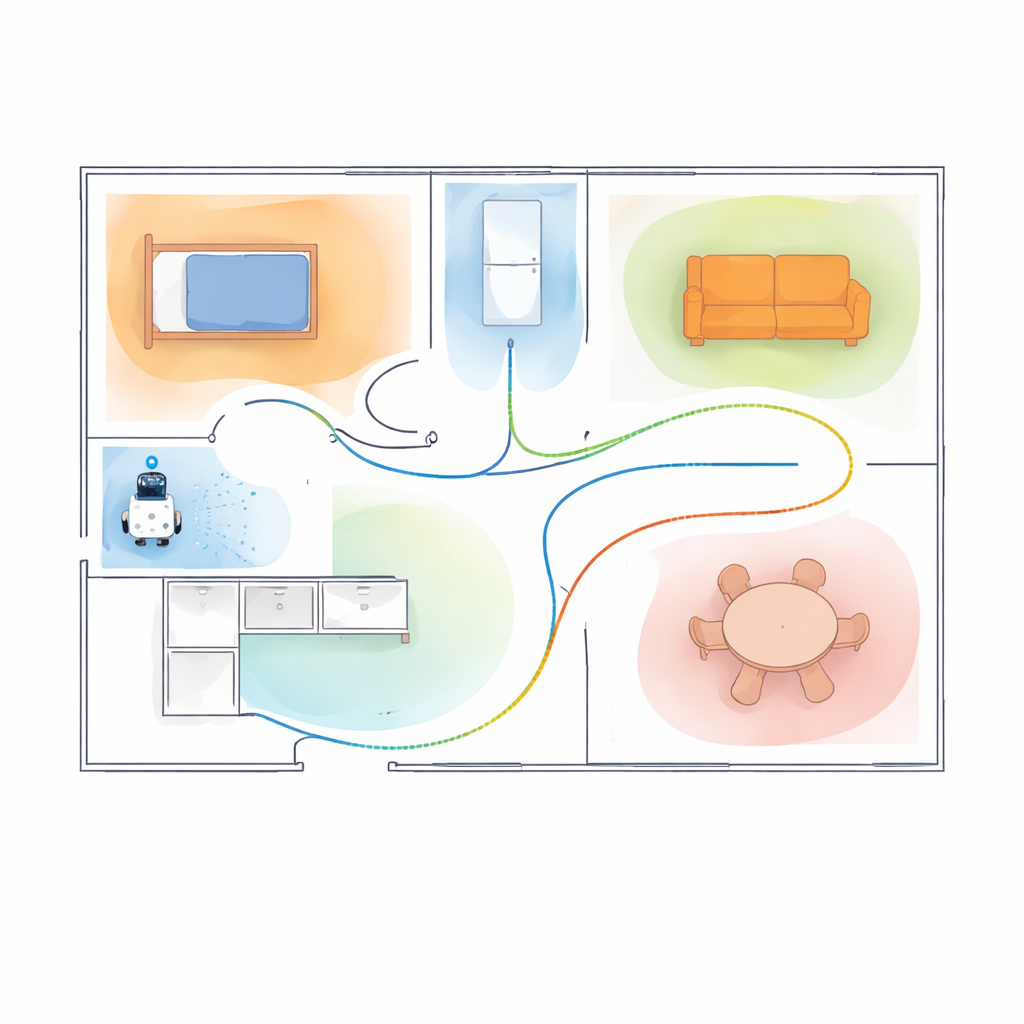
人の空間利用を尊重する経路計画
同じ地図はロボットの移動にも役立ちます。各物体タイプが滑らかな影響場として表現されているため、数値ウェイトを調整することで特定の領域を好むように、あるいは避けるように指示できます。夜間はベッド周りを避ける領域にしたり、物を探す際にはテーブルを引き寄せる領域にしたりできます。これらの意味的好みは、標準的な障害物地図や壁まわりの安全マージンと組み合わされて、フロアプラン上の単一のコスト地形を形成します。古典的な経路プランナーは、このコスト地形に基づき、衝突を避けるだけでなく意図した社会的・タスク関連の偏好にも従う経路を見つけます。現実に即したデータセットと実際の家具のあるアパートでの実験により、こうした意味的に偏った経路は意図した好みによりよく従う一方で、経路長がわずかに増えることがあり、実際の住居ではより滑らかになることが示されました。
日常のロボットにとっての意義
簡単に言えば、本研究はロボットに住宅を人間と同じように考えさせます:単に壁に囲まれた空の箱ではなく、家具によって定義された部屋として捉えるのです。各主要物体を柔らかな確率クラウドで包むことで、単一でコンパクトな地図が「私はどこか?」と「どう行くべきか?」の両方をサポートし、用途ごとの別個のモデルを必要としません。評価では、このアプローチにより散乱した物や見た目が似た部屋でもロボットの自己位置推定がより確実になり、人間の期待に合った経路を選べることが示されました。これらの考えが成熟すれば、将来の家庭用ロボットはより礼儀正しく、知的に空間を移動できるようになり、動きがより機械的でない印象を与えるようになるでしょう。
引用: Mora, A., Mendez, A., Moreno, L. et al. Object-aware semantic mapping using probability density functions for indoor relocalization and path planning. Sci Rep 16, 9450 (2026). https://doi.org/10.1038/s41598-026-40498-3
キーワード: 屋内ロボットの位置特定, 意味地図, 物体認識ナビゲーション, 確率的ロボット地図, 経路計画