Clear Sky Science · ja
不確実性を考慮した試行時適応を伴う深層確率的走破性:惑星探査ローバーの安全志向ナビゲーション
なぜより安全なローバー走行が重要か
月や火星に車輪ロボットを送る際、砂や岩、斜面の上を人の手を借りずに走行しなければなりません。地面の軟らかさを一度誤判断するだけで、数十億円規模のローバーが永遠に動けなくなってしまう可能性があります。実際、NASAのオポチュニティは波打つ砂地に何週間も閉じ込められたことがありました。本研究は、ローバーが先行する地面の危険度を「感じ取り」、より安全な経路を選び、走行中に過ちから学習する新たな方法を提示します。
隠れた危険としての軟弱地盤
他の天体では、カメラで容易に見える大岩や崖だけが危険というわけではなく、一見平坦に見えるゆるい砂地が思わぬ脅威になります。車輪がこうした地形で空転すると、車体は滑り、指令どおりの速さで進めず、エネルギーを浪費し、最悪の場合は動けなくなります。従来のナビゲーションシステムは見た目の幾何学的危険—何が障害物に見えるか—に主に注目し、車輪に対する地面の挙動を十分に捉えていません。一方、画像や3D地形から車輪のスリップを予測する機械学習手法は、照明や斜度など見慣れない条件下では誤ることがあり、予測の不確実性を明示しないことが多いのです。
ローバーにリスクを推論させる
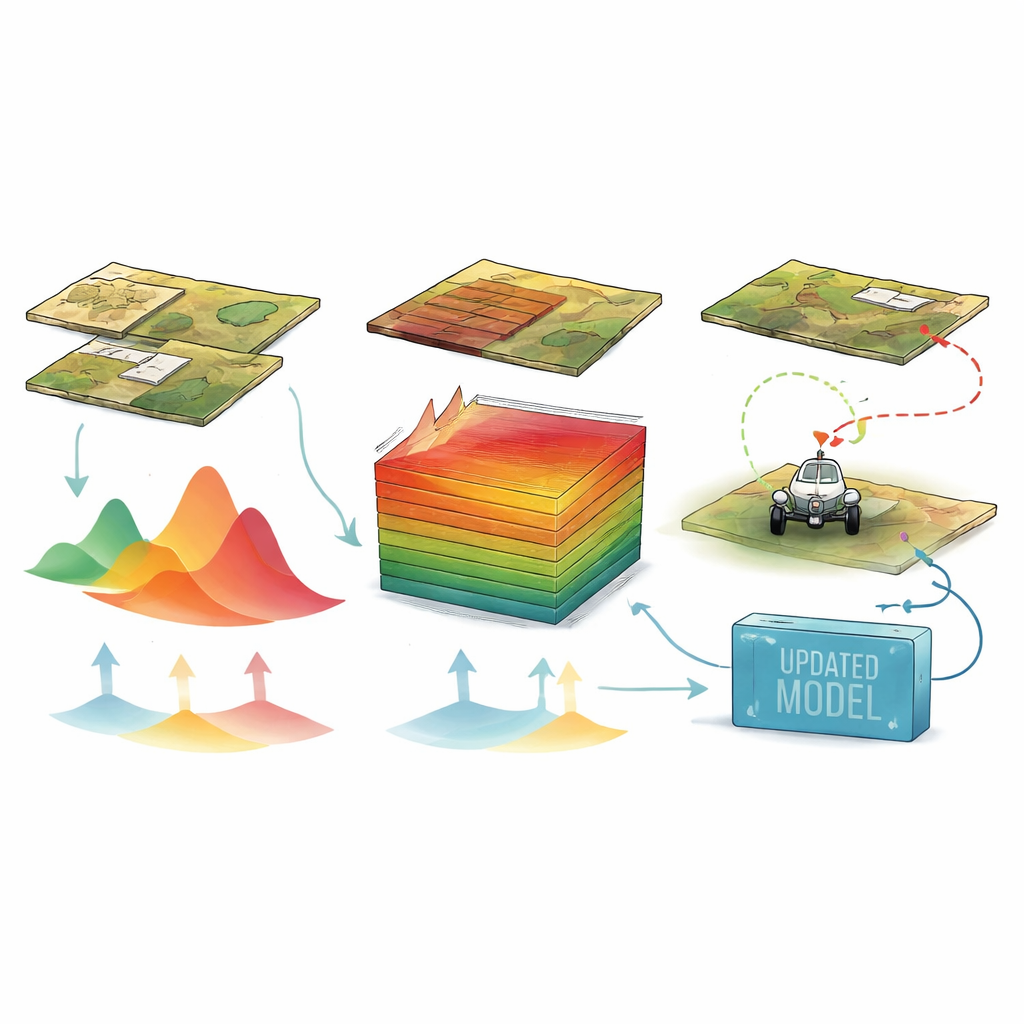
著者らは「深層確率的走破性」と呼ぶ学習と経路計画を統合した枠組みを提案します。各地形パッチで車輪がどれだけ滑るかを単一の「最良推定」で出す代わりに、色画像と局所傾斜に基づいて起こりうるスリップの確率分布全体を予測します。複数の深層ニューラルネットワークのアンサンブルが上空から地形を捉え、格子上の各移動候補について期待スリップ値とその不確実性の両方を出力します。その分布から、システムはスリップを実効走行速度に変換し、最終的に各ステップの移動時間コストに変換します。ローバーがはまり込みやすい領域には非常に高いコストが割り当てられ、予測が有利かつ確信がある領域には低いコストが与えられます。標準的な経路探索アルゴリズムが、短距離と座礁リスクの低さをトレードオフする経路を見つけます。
走行しながら学習させる
惑星探査で大きな課題となるのは、到着後にローバーが目にする条件が訓練データと大きく異なる場合があることです:斜面がより急であったり、土壌特性が未知であったり、照明が大きく異なったりします。これに対応するため、枠組みには試行時適応の仕組みが組み込まれています。ローバーが走行する間に実際のスリップを計測し、短い移動ごとに得られる新しい観測を用いてニューラルネットワークの追加された「スケールとシフト」層を穏やかに調整し、元の重みは固定します。この戦略により、ごく少数の観測だけで新しい地形に素早く適応しつつ、これまでに学んだ知識を保持できます。更新された予測は再計画に反映され、選択された経路は走りながら改善されます。
厳しい試験での検証
実際のローバーデータは地形の種類が限られているため、研究チームは火星に似た大規模な合成データセットを構築しました。コンピュータ生成の粗い地形に、色とスリップ挙動が異なる10種類の隠れ地形クラスを組み合わせ、斜度の急さや照明方向を変えて、見慣れたシナリオと見慣れないシナリオを作り出しました。数千のシミュレーションミッションで、新手法は不確実性を無視するか、あるいはそれを間接的にしか使わない二つの最先端プランナーと比較されました。見慣れた条件では手法間の性能に大差はありませんでしたが、最も厳しいケース—暗い照明やクレーター状の急斜面—では、深層確率的走破性が成功率の向上と最大スリップの低下を実現し、移動時間も競争力を保ちました。試行時適応を有効にすると、予測誤差がさらに減り、安全性が向上しました。特に訓練条件と大きく異なる環境で顕著でした。
今後のミッションへの意義
一般向けには、本研究は惑星ローバーにより慎重で自己認識的な走行手段を与えるという点が要旨です。車輪のグリップに関する単一の予測を盲信する代わりに、ローバーは期待される挙動とその不確実性の両方を評価し、速さと座礁のリスクを天秤にかけて経路を選べるようになります。自身のスリップ経験から継続的に学習することで、人手による救助なしに新しい砂質や斜面、照明条件に適応できます。宇宙機関がより長期で野心的な表面ミッションを計画する際、こうした不確実性を考慮したナビゲーションは、貴重なロボットが新たな科学ターゲットを探査する時間をより多く確保し、自らを掘り出す時間を減らすのに役立つでしょう。
引用: Endo, M., Taniai, T. & Ishigami, G. Deep probabilistic traversability with test-time adaptation for uncertainty-aware planetary rover navigation. Sci Rep 16, 9499 (2026). https://doi.org/10.1038/s41598-026-40109-1
キーワード: 惑星ローバーの航行, 地形の走破性, 不確実性を考慮した計画, 機械学習とロボティクス, 自律探査