Clear Sky Science · ja
InFoRM: 感覚運動制御のための統一的な逆モデルと順モデル
脳が運動を簡略化する仕組み
コップに手を伸ばしたりキーボードを打ったりするたびに、脳は「そこへ手を動かす」という意図を正確な筋肉活動に変換すると同時に、その動きがどのように感じられるかを予測しなければなりません。従来の理論では、この仕事に対して脳は二つの別々の内部計算機を使うと考えられてきました:一つは筋肉への指令を生成するため、もう一つは入ってくる感覚を予測するためです。本研究は、大胆な代替案を検討します。すなわち、単一の統一回路が問題の両側面を同時に扱うことで、エネルギーを節約し性能を向上させうる、という考えです。
制御を考える二つの見方
運動制御の従来モデルは分裂したシステムを想定します。望ましい結果(たとえば指先の空間経路)を必要な筋活動に変換する「逆」部分と、身体がどのように動き、どのような感覚フィードバックが生じるかを予測する「順」部分です。教科書ではこれら二つはしばしば別の箱として描かれます。しかし、脳画像や病変データはそのようなきれいな分離を明確に支持しておらず、ある脳領域が両方の役割に関与しているように見えることもあります。さらに、二つの複雑な回路を維持することは代謝的に高コストである可能性があります。著者らはそこで、単一の柔軟なネットワークが運動コマンドを生成し、感覚フィードバックを予測し、内部信号だけから元の目標を推定することすら学べるかどうかを問いかけます。
すべてをこなす単一ネットワーク
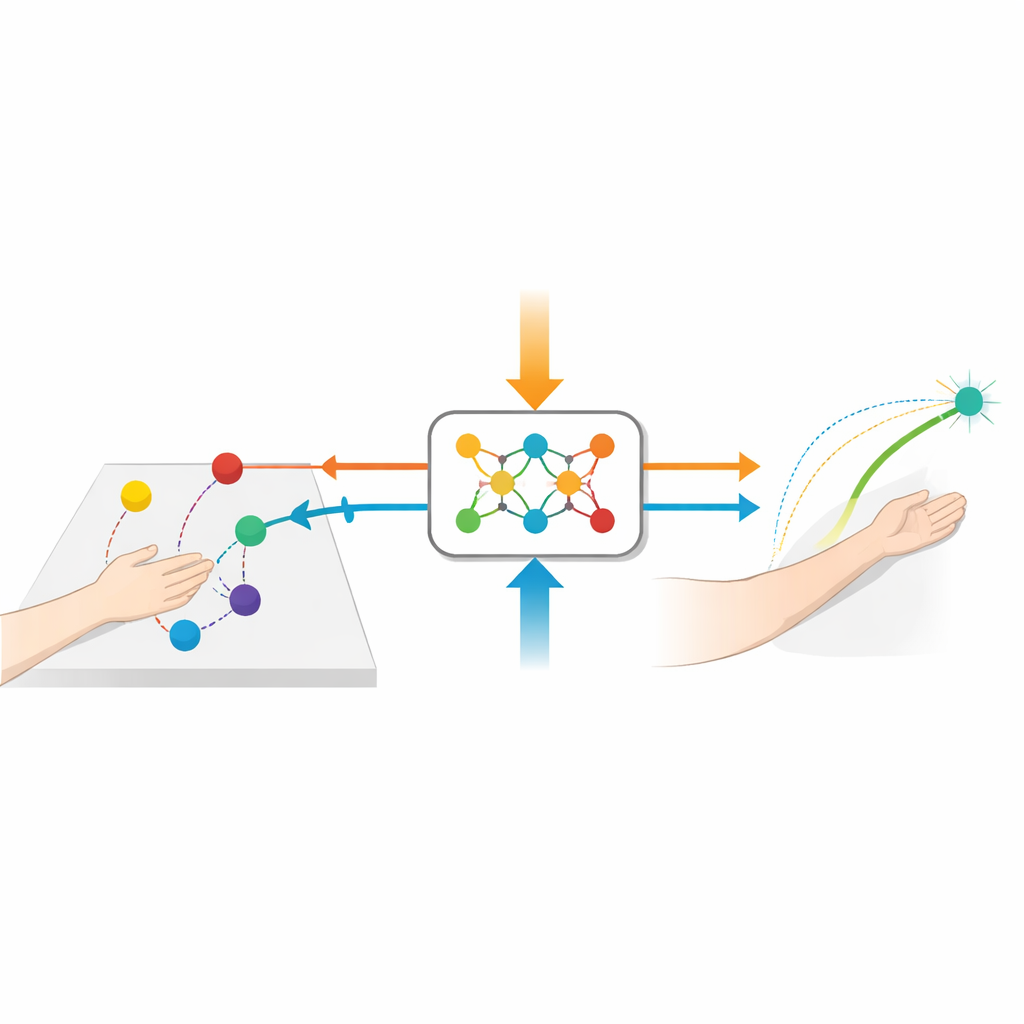
この考えを検証するために、研究者たちはInFoRM(inverse–forward–recognition modelの略)という計算モデルを構築しました。二つの積み重なったモジュールの代わりに、InFoRMは単一の再帰型ニューラルネットワークを用います—目標、筋肉、感覚の信号がすべて流れ込む相互接続ユニットの網です。この共通の「リザーバ」活動から、三つの読み出しが並行して訓練されます:一つは望ましい手の軌道を再構成し、一つはそれを達成するために必要な筋活動を生成し、一つは続くであろう筋長や速度といった感覚信号を予測します。重要なのは、同じ内部ダイナミクスが三つの課題すべてを同時に支えるため、モデルは各課題を個別に学習するのではなく情報を共有できる点です。
モデルを現実世界の試験にかける
研究チームは、参加者が中心位置から卓上に配置された異なる方向と距離のターゲットへリズミカルに到達する実際の腕の動きを記録しました。モーションキャプチャデータと詳細な筋骨格モデルにより、各運動について指先の経路、推定される筋活動、および筋からの感覚様信号が得られました。InFoRMはある方向の部分集合で訓練され、その後いくつかの難しいシナリオで試験されました:学習済みの動作を繰り返すこと、学習したものの中間にある新しい方向で動作を生成する(見たものを「モーフィング」する)こと、そして被験者が自発的にターゲット間を移る自然な遷移を扱うことです。比較のために、著者らは従来型の分離した逆・順ネットワーク構造や、追加の入力情報を与えられた拡張版も構築しました。

より少ない資源でより鋭い予測
すべての試験において、統一されたInFoRMネットワークは記録された動作と筋信号を、いずれの分離アーキテクチャよりも正確に再現しました。その出力は真の信号により忠実に追随し、誤差も小さかった。これは、未訓練の方向への補間を求められた場合や現実的なスクリプトなしのターゲット列に対処する場合でも同様でした。重要なのは、InFoRMが同等かそれ以下のニューロン数で、はるかに少ない訓練反復回数でこの高い精度に達したことであり、計算効率の向上を示唆しています。また、同じ目標・運動・感覚情報の組み合わせへアクセスできる最良の拡張制御モデルさえ上回ったことから、有利さは単に入力が豊富であることによるのではなく、すべてを一つの再帰回路に統合している点に起因すると考えられます。
脳の理解にとっての意味
この発見は、脳が運動のために鋭く分離された「順」と「逆」のエンジンを維持しているとは限らないという考えを支持します。代わりに、単一の豊かに結合された回路が両者を暗黙のうちに包含し、運動指令と予測が同じ基盤的ダイナミクスから生じる可能性があります。この視点は、自らの身体や世界に関する期待を絶えず生成・更新する予測装置としての脳という現代的見方とよく符合します。モデルは依然として単純化された抽象表現であり、神経遅延や可塑的なシナプスのような生物学的詳細は今後の課題ですが、InFoRMは統一設計が強力で経済的であり得ることを示し、我々の神経系がどのように運動を制御しているかについて魅力的な代替設計を提示します。
引用: de Graaf, M.L., Kloock, L., Schwarze, A. et al. InFoRM: a unified inverse and forward model for sensorimotor control. Sci Rep 16, 8490 (2026). https://doi.org/10.1038/s41598-026-39944-z
キーワード: 感覚運動制御, 内部モデル, ニューラルネットワーク, 運動学習, 予測処理