Clear Sky Science · ja
ACFM:UAV交通における小物体検出性能を向上させる適応チャネル重み付け融合アルゴリズム
空からもっとよく見えること
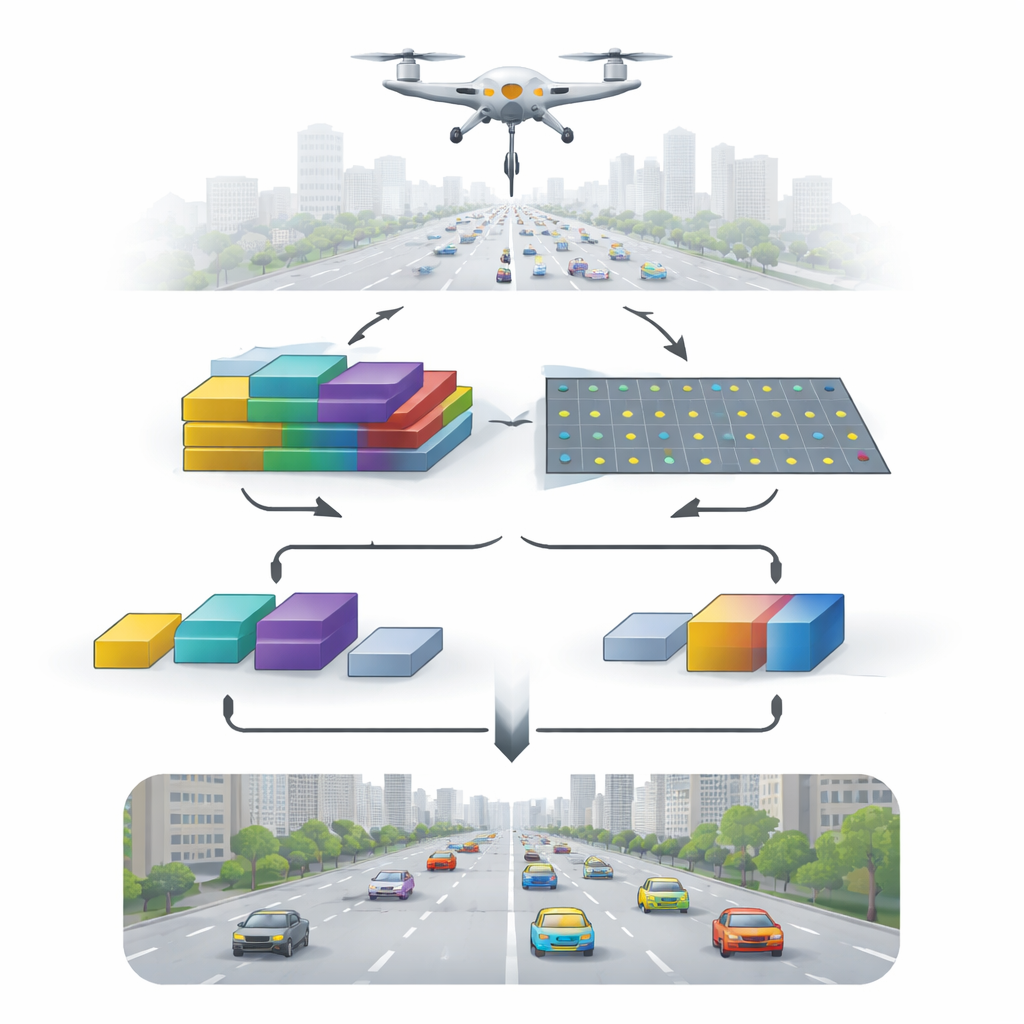
ドローンが交通監視、群衆の安全確保、災害現場の観察にますます利用される中で、単純だが厄介な問題が残ります:高高度から見ると、我々が関心を持つ対象—自動車やバス、さらには人間—は画面のごくわずかなピクセルしか占めないことが多いのです。これらの小さな点は、影や看板、モーションブラーの多い街路ではアルゴリズムに見落とされやすい。本論文は、検出速度を著しく低下させることなく、ドローン映像中のこうした小物体をコンピュータがより明確に“見る”のを助ける新しい手法を紹介します。
なぜ小さな点が重要なのか
ドローンカメラは高高度から広い景観を捉えるため、1枚の画像に高速道路、建物、樹木、そして多数の車両が含まれます。それらの多くの車両は非常に小さく表示され、互いに重なったり隠れたりします。従来の深層学習検出器は大きく明瞭な物体を見つけるのは得意ですが、ネットワークの深い層へ情報が流れると細部が失われがちです。その結果、小さな車両は背景に溶け込み、特に混雑した交差点、低照度、わずかにブレた映像では見落とされやすくなります。既存のマルチスケール手法は異なる層から情報を結合することである程度助けになりますが、通常は固定された事前設定のルールに依存しており、シーンが特に煩雑・複雑になると適応が難しくなります。
手がかりを賢く融合する方法
著者らは、既存の物体検出器に組み込んでドローン交通シーンの小さなターゲット検出を向上させる適応チャネル重み付け融合モジュール(ACFM)を提案します。すべての視覚情報を同等に扱う代わりに、ACFMは並列に動作する2つの専門化されたブランチを実行し、それらの出力をシーンに応じて融合します。1つのブランチはスケール間で特徴を扱う方法を洗練させ、細かな空間的詳細が失われないようにします。もう1つのブランチはスポットライトのように機能し、小さな物体の重要な手がかりを増幅し、気を散らす背景パターンを抑制します。重要なのは、これらブランチ間の融合が固定的ではないことです。ACFMは現在の画像に応じて各ブランチをどれだけ信頼するかを調整し、静かな高速道路と混雑した交差点とで異なる応答ができるようにします。
スケール間で詳細を保持する
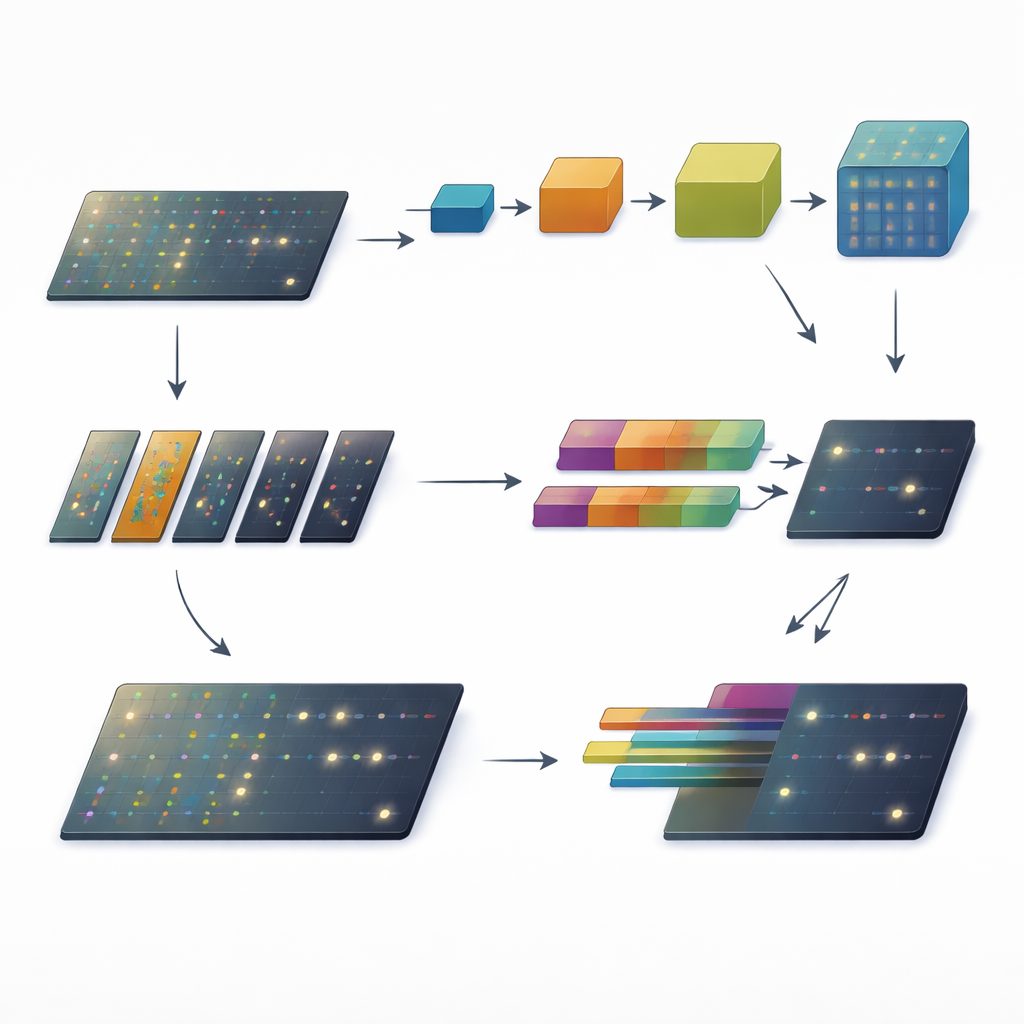
最初のブランチはマルチスケール改良ブロックと呼ばれ、ネットワークは特徴量を2つの経路に通します。1つの経路は元の情報を単純に保持し、シャープで高解像度の細部が残るようにします。もう1つの経路は表現を圧縮してから拡張し、モデルが小さな車両がシーン内のどこにあるかという広い文脈を理解することを促します。最後にこれらの経路は統合され、各出力ピクセルが局所の鋭い詳細と周辺領域の理解の両方の恩恵を受けます。これにより、背景が煩雑あるいは部分的に覆われている場合でも、小さな車やバスに対してより厳密で一貫したバウンディングボックスを描くことが容易になります。
背景ノイズを抑える
第2のブランチは注意機構に焦点を当てます。特徴チャネルをグループに分割し、各グループについて最も有望な領域だけを強調するスパースな「マスク」を学習します。路面、屋根、樹冠のように背景に見える領域は抑えられ、車両の反射やエッジといった小さいが意味のある信号は増幅されます。これらの強調された詳細を制御された方法で元の特徴と組み合わせることで、このグループ化されたスパース注意ブランチはよりきれいで識別力の高いシーン表現を生成します。その結果、検出器がアスファルトの模様や建物の影を本物の車両と混同する可能性が低くなります。
シーンに応じた融合を可能にする
ACFMの最後の要素は、チャネルごとに各ブランチにどれだけ依存するかを決定するチャネルレベルの適応重み付け機構です。まず画像全体で何が起きているかを要約し、次に軽量な演算で0から1の間の重みを推定します。シーンが単純で対象物がよく分離している場合は、ネットワークはマルチスケール改良により重みを置くことがあります。シーンが密集していたり煩雑だったりノイズが多い場合は、背景の気を散らす要素を抑える注意ブランチにより重点を移せます。この動的なバランスは、手作りの固定的な融合ルールに代わり、自動でデータ駆動型の戦略を提供し、フレームごとに変化する条件に柔軟に応答できるようにします。
ドローン交通のための鋭い視線
提案手法を人気のある検出器GFLに組み込み、3つの公開ドローン交通データセットで評価したところ、ACFMは特に多くの小さな重なり合う車両を含む難しいセットにおいて一貫して検出スコアを向上させました。精度の改善は追加の計算コストがほとんど伴わず、強化されたシステムが実用的な交通監視に必要なリアルタイムに近い動作を維持できることを意味します。専門外の読者への要点は明快です:詳細を保持し、ノイズを抑え、シーンに基づいて特徴の組み合わせ方を適応させることで、ACFMはドローンを硬直したパターンマッチャーではなく注意深い人間の観察者により近づけ、将来のスマートシティや航空監視アプリケーションのより信頼できる基盤を提供します。
引用: Liu, S., Zhu, H., Yuan, Z. et al. ACFM: adaptive channel weighted fusion algorithm for improving small object detection performance in UAV traffic. Sci Rep 16, 8366 (2026). https://doi.org/10.1038/s41598-026-39789-6
キーワード: ドローンによる交通監視, 小物体検出, コンピュータビジョン, 注意機構, マルチスケール特徴融合