Clear Sky Science · ja
受粉を支援するAI搭載ドローン(ナツメヤシ向け)
ナツメヤシの開花を助けるロボット
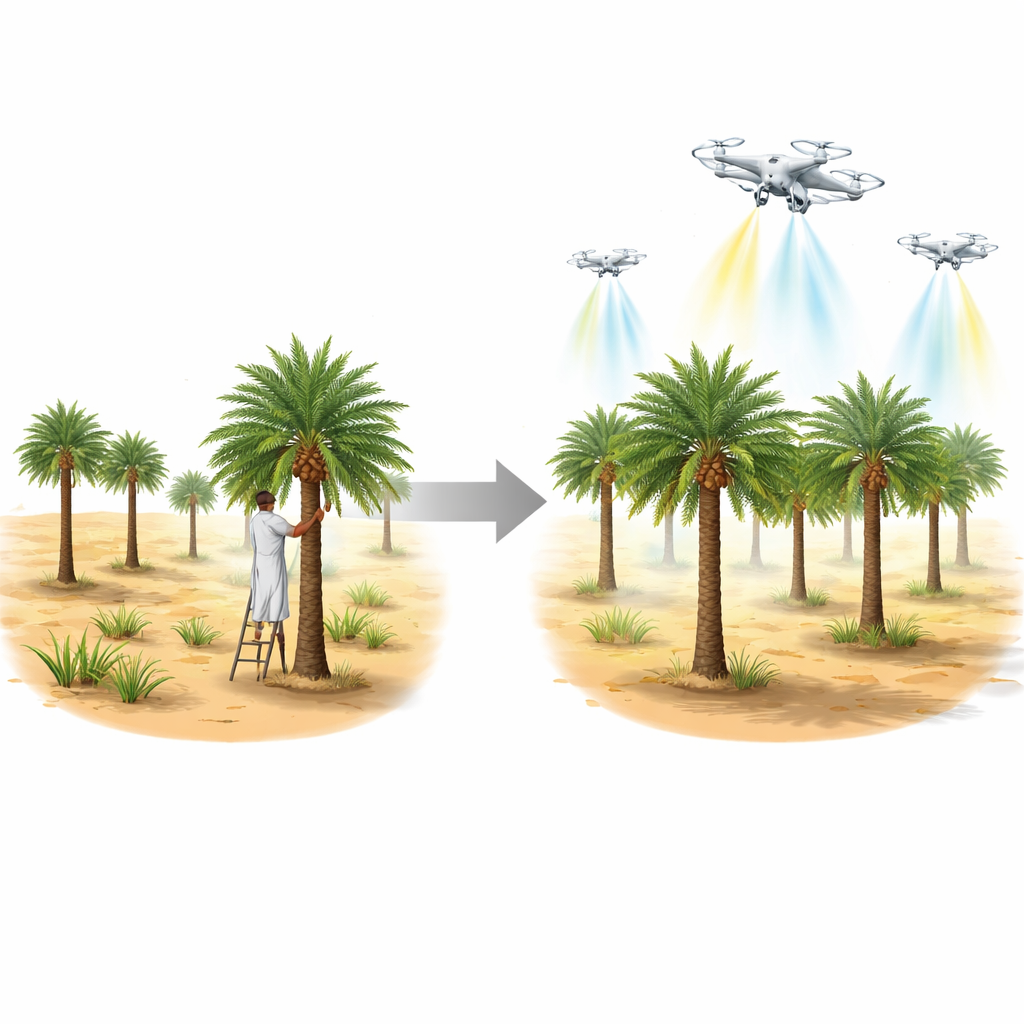
ナツメヤシは多くの乾燥地域で食料、収入、文化的遺産を支える重要な存在です。しかし、各樹に実をつけさせる作業はいまだに手作業に頼る煩雑な工程が残っています。作業者が高い幹をよじ登り、花に手で花粉をはたく必要があるのです。本論文では、小型の飛行ロボット(ドローン)を人工知能で誘導し、その多くの作業を代替させることで、農家の受粉をより速く、安価に、そして持続可能にできる可能性を探ります。
なぜこの樹の受粉は難しいのか
ナツメヤシは暑く過酷な環境で育ち、高層建物ほどの高さに達することがあります。雄花と雌花が別々の樹に咲くため、花粉は意図的に移さなければなりません。従来の方法――雄花の房を雌房に結びつける、あるいは乾燥粉末状の花粉を吹き付ける――は、熟練作業者、厳密なタイミング、大量の花粉を要します。農場が拡大し熟練労働者が不足する中、これらの方法は追いつかなくなりがちです。しかも開花は数週間にわたって分散して起こるため、同じ樹に何度も訪れる必要があります。気候変動や自然の送粉者の減少も問題を悪化させています。
果樹園に入るドローン
近年の小型飛行機体と高性能カメラの進歩によって、新しいアプローチが可能になりました。本研究では、ナツメヤシの開花部位を見つけ、花粉溶液の微細なミストを噴霧できるドローンシステムを設計・モデル化しています。二つの運用モードを検討しました。半自律モードでは、操作者がドローンを樹の近くまで飛ばし操作する一方で、機載ソフトウェアが花を検出し噴霧を制御します。完全自律モードでは、ドローンがあらかじめ設定された飛行経路をたどり、バッテリーやセンサーを監視し、障害物を回避し、花を検出して姿勢を合わせて噴霧し、自律的に基地に戻ります。どちらの方式も、樹に登る何時間分もの作業を、案内された数分の飛行で代替することを目指しています。
ドローンに花を見分けさせる
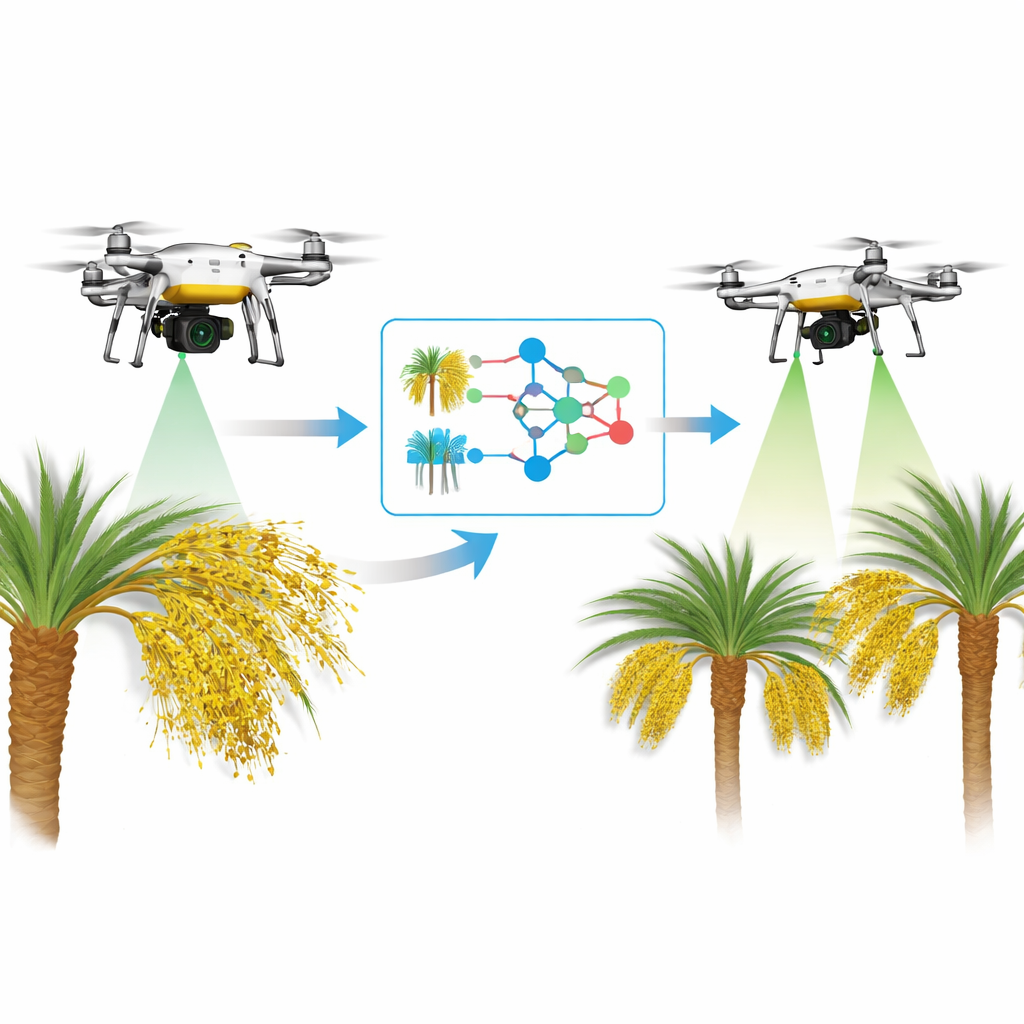
これを実現するために、ドローンは花房を十分に明確に「見て」、どこでいつ受粉するかを判断できなければなりません。研究者たちは、さまざまな照明、角度、発育段階で撮影したヤシの樹冠の大量画像データセットを構築しました。専門家が花房の周りにバウンディングボックスを描き、コンピュータビジョンがそれらを認識できるようにしました。チームは最新の「You Only Look Once(YOLO)」モデル――リアルタイムで物体を検出できる高速な深層学習システム――をこのデータに学習させました。いくつかのバージョンと関連モデルを試し、最も性能の良いものを圧縮・最適化して、ドローンに搭載した小型低消費電力コンピュータ上で効率的に動作させました。綿密な調整の末、システムはフレームを毎秒十数枚以上解析しつつ、噴霧の精度を保つのに十分な検出精度を確保できました。
飛行アシスタントの設計
ビジョンシステムと並行して、著者らは果樹園作業に適したクアッドコプターのプラットフォームを設計しました。モーターとプロペラがフレーム、バッテリー、1リットルの花粉溶液を安全に持ち上げるために必要な推力や、充電前に飛行できる時間を計算しました。典型的なバッテリーで、実験用プラットフォームは1回の飛行で約6本の樹を受粉でき、各樹は主要な花房を整列して噴霧するのにおよそ1分かかります。研究では4、6、8ローターなど異なるドローン配置を比較し、機動性、搭載量、信頼性、コストのトレードオフを明らかにしました。大規模農場では複数のドローンを並列運用することで、単一機で何時間もかかる1000本の受粉を、小規模な機隊でわずか数時間に短縮できることを示しています。
労力・花粉・環境の節約
このシステムの主な利点の一つは花粉の使い方です。粉状の雲を木全体に浴びせる代わりに、ドローンは希釈した液状懸濁液を必要な箇所に直接塗布します。著者らの計算と既存の市販システムとの比較によれば、この設計では1本当たりの花粉使用量を約97%削減しつつ、同等の効果を与えられる可能性があります。同時に、労力は約80%削減できると見積もられており、1人の操作者と少数のドローンでより多くのクライマーを置き換えられます。同じプラットフォームは、肥料や農薬の精密な散布にも応用でき、化学物質の無駄や流出を減らす効果も期待できます。
農家にとっての意味
本研究は工学的な性能に焦点を当てており、長期的な収穫量がどれだけ増えるかを証明するものではありません。それでも、AI誘導ドローンがナツメヤシの花を安定して検出し、やさしい噴霧で到達でき、従来法よりはるかに少ない労力と花粉で作業を行えることを示しています。簡潔に言えば、この試作は将来の農場が小規模なスマート飛行ロボットの群れに季節的な負担の大きい仕事の一つを任せ、人々を危険な登高作業から解放しつつ、世界でも最も乾燥した地域の信頼できる収穫を支える手段になり得ることを示唆しています。
引用: AlRaeesi, I., El-Khazali, R. AI-enabled drones for date palm pollination. Sci Rep 16, 10158 (2026). https://doi.org/10.1038/s41598-026-39739-2
キーワード: ドローン受粉, ナツメヤシ栽培, 精密農業, 農業用ロボティクス, コンピュータビジョン