Clear Sky Science · ja
PMSMの逐次モデル予測直接速度制御
日常の電動機のためのより賢い制御
電動機は工場の生産ライン、ポンプ、ロボット、さらには一部の家電製品まで静かに動かしています。これらのモーターを効率的かつ滑らかに動作させることは、エネルギーの節約、騒音や摩耗の低減、信頼性向上につながります。本論文は、広く使われているタイプのモーターを、変化にすばやく反応させながら不安定化や過度の電気的“ノイズ”を生じさせないよう制御する新しい方法を探ります。著者らは、エンジニアにとって調整が簡単でありながら、高速かつ正確な速度制御を実現することを約束する戦略に着目しています。
なぜ現在のモータ制御は調整が難しいのか
永久磁石同期電動機は、コンパクトで効率的、かつ精密な速度制御が可能なため広く使われています。従来の制御方式は複数の入れ子ループと試行錯誤で調整する多数のノブに依存します。モデル予測制御に基づく新しいアプローチは、モーターにとって最良の動作を将来のごく短い時間先まで予測して選ぶことで応答性を高め、正確な速度制御や低電流消費など複数の目標を同時に扱えるようにします。しかし、これらの予測型コントローラは通常、すべての目標をいくつかの「重み付け係数」に依存する大きな数式にまとめます。これらの重みを選ぶのは極めて難しく、適切な選択は優れた性能をもたらす一方、悪い選択はシステムを鈍くしたり不安定にすることがあります。
段階的に意思決定する方法
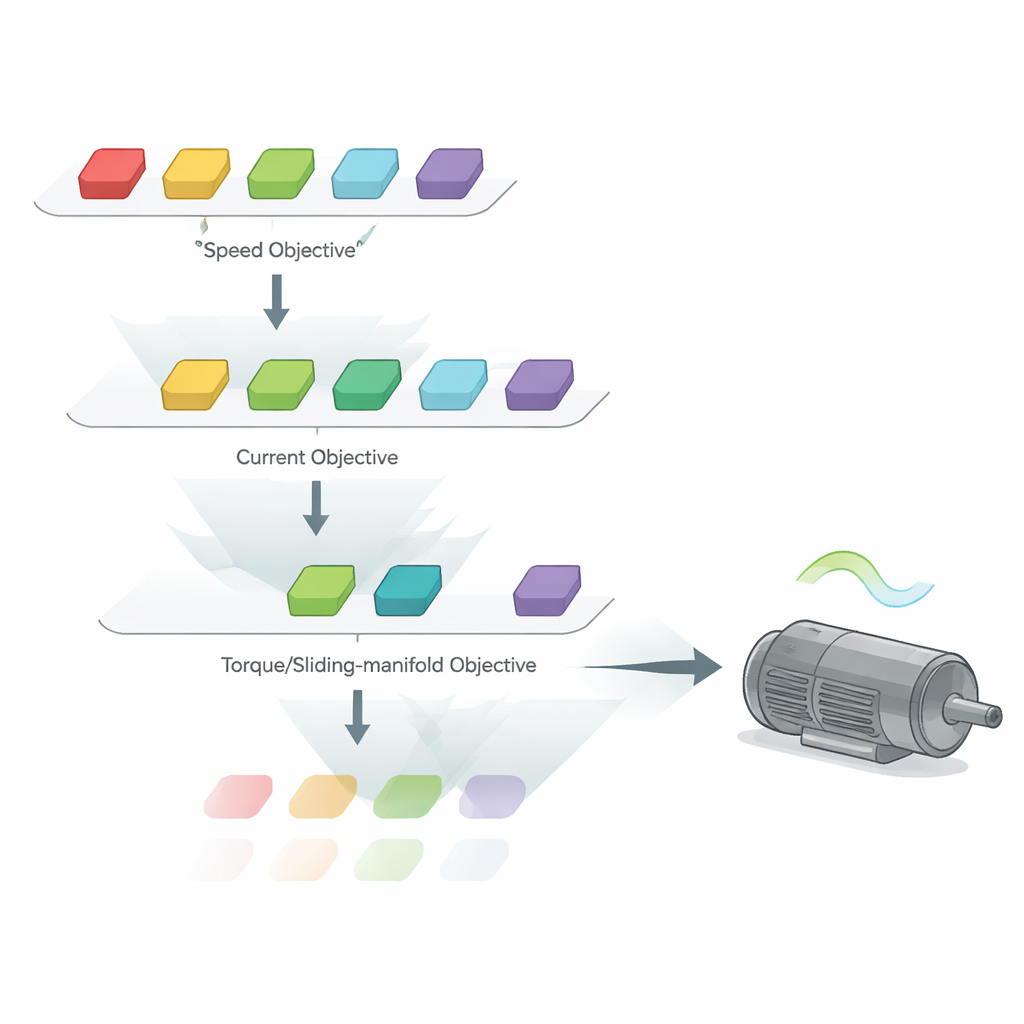
すべての目標を一つの複雑な式に詰め込む代わりに、著者らは「逐次」アプローチを検討します。ここでは、コントローラは各スイッチ位置に対してモーターがどう振る舞うかを予測しますが、評価する目標は順番により簡潔なものに分けられます。まず速度挙動が悪化するスイッチ選択肢を排除します。次に残った選択肢の中から電流の効率的利用を満たすものだけを残します。最後に、速度誤差とトルク誤差を結びつける特別なスライディングルールを用いてモーターのトルクを最も良く形成する選択肢を選び、速度がより速く収束するようにします。各段階が単一の目標に集中するため、複数の重み付け係数を使いこなす必要がなく、論理的な削除プロセスで候補を絞り込みます。併せて、負荷トルクを推定するオブザーバが存在するため、外乱があっても予測が正確に保たれます。
安定性を高める改良設計
著者らがこの逐次法を最初に試したとき、速度変化への応答は速かったものの、不安定になりやすく、特に応答を速めようとするとモーター電流に大きなリップルが発生することがわかりました。これを改善するために、彼らは最初の決定ステップに巧妙な修正を加えた改良版を提案しました:予測される速度だけでなく、特定の電流成分に穏やかなペナルティを課し、そのペナルティを要求速度に応じてスケーリングするのです。低速ではコントローラは電流の安定化により重点を置き、高速では性能を維持するためにより強い作用を許容します。この変更により、トルクに対するより攻めたスライディングルールを用いても不安定化を引き起こさずに済みます。詳細なコンピュータシミュレーションでは、改良版は良く調整された従来の予測コントローラの立ち上がり時間に匹敵し、電気的歪みのレベルも同等でありながら、調整パラメータは少なくて済みました。
実験室で方法を試す
研究チームは、オリジナルと改良の逐次コントローラの両方を、ラピッドプロトタイピングプラットフォームを用いて実際の1.1キロワットのモータドライブ上に実装しました。急速な速度ランプ、突発的な負荷投入、さらには速度反転など現実に即した条件下で、標準的な予測コントローラと比較しました。オリジナルの逐次コントローラは速度を制御できましたが、特に高回転域で時折安定性を失い、強い電流リップルを示しました。対照的に改良版は、試験した範囲で安定に動作しました。スライディングルールを形作る単一の主要パラメータを調整することで、研究者らはより厳密な速度追従とより滑らかな電流波形の間でトレードオフを行えました。中間的な設定は実用的なバランスを提供し、保守的な設定と比較して速度誤差は大きく改善され、電流歪みの増加は許容範囲にとどまりました。
実用的な駆動にとっての意義
専門外の読者にとっての主なメッセージは、著者らが高性能電動機を制御するための、よりシンプルでありながら強力な方法を実証したことです。彼らの改良された逐次戦略は、従来の予測型コントローラの調整に伴う多くの試行錯誤を取り除きつつ、速度変化や外乱に対する迅速な応答を維持します。欠点もあり、特に要求の厳しい設定では電流波形が理想よりもややノイジーになることがありますが、本手法はより堅牢で立ち上げが容易なモータドライブに向けた重要な一歩です。今後の研究ではこれらの電流歪みを低減し、安定性のさらなる解析を進めることで、より大規模で厳しく規定された産業システムに本格導入できるようにすることが目標とされています。
引用: Pancurák, L., Horváth, K. & Kyslan, K. Sequential model predictive direct speed control of PMSM. Sci Rep 16, 8226 (2026). https://doi.org/10.1038/s41598-026-39256-2
キーワード: 永久磁石同期電動機, モデル予測制御, モータ速度制御, 逐次制御, パワーエレクトロニクス駆動