Clear Sky Science · ja
周波数低ランク強調による悪天候ドメイン一般化セマンティックセグメンテーションのためのRFGLNet
悪天候時でも道路を見失わない
自動運転車や配送ロボットはより安全で効率的な交通をもたらす可能性がありますが、それは周囲を確実に「見る」能力があってこそです。雨、霧、雪、そして夜間は視覚を著しく難しくし、コントラストを消し、ノイズを付加し、人や車、縁石の輪郭をぼやけさせます。本論文は、天候が最悪のときでも機械の道路理解を鮮明に保つことを目指した新しいコンピュータビジョンシステム、RFGLNetを紹介します。

なぜ悪天候が機械の視覚を奪うのか
現在の自動運転システムはしばしばセマンティックセグメンテーションと呼ばれる処理に依存しており、画像内の各ピクセルに道路、車、歩行者、建物などのクラスを割り当てます。晴天の昼間では、現代のニューラルネットワークはこれを驚くほど正確に行います。しかし大雨や濃霧下では、画像は輝度を失い、ノイズが増え、物体間の境界がぼやけます。あらゆる悪天候条件に対応する大規模なデータ収集とラベリングは費用がかかりすぎるため、多くのシステムは主に通常の晴天画像で訓練されています。未見の嵐や雪に直面すると性能は急落します。従来の対策は、まず画像をきれいにしてからセグメントするか、特定のターゲット条件にモデルを適応させるというものでしたが、いずれも脆弱で遅く、悪天候のラベルデータに過度に依存しがちです。
過酷な条件のために設計された新しいネットワーク
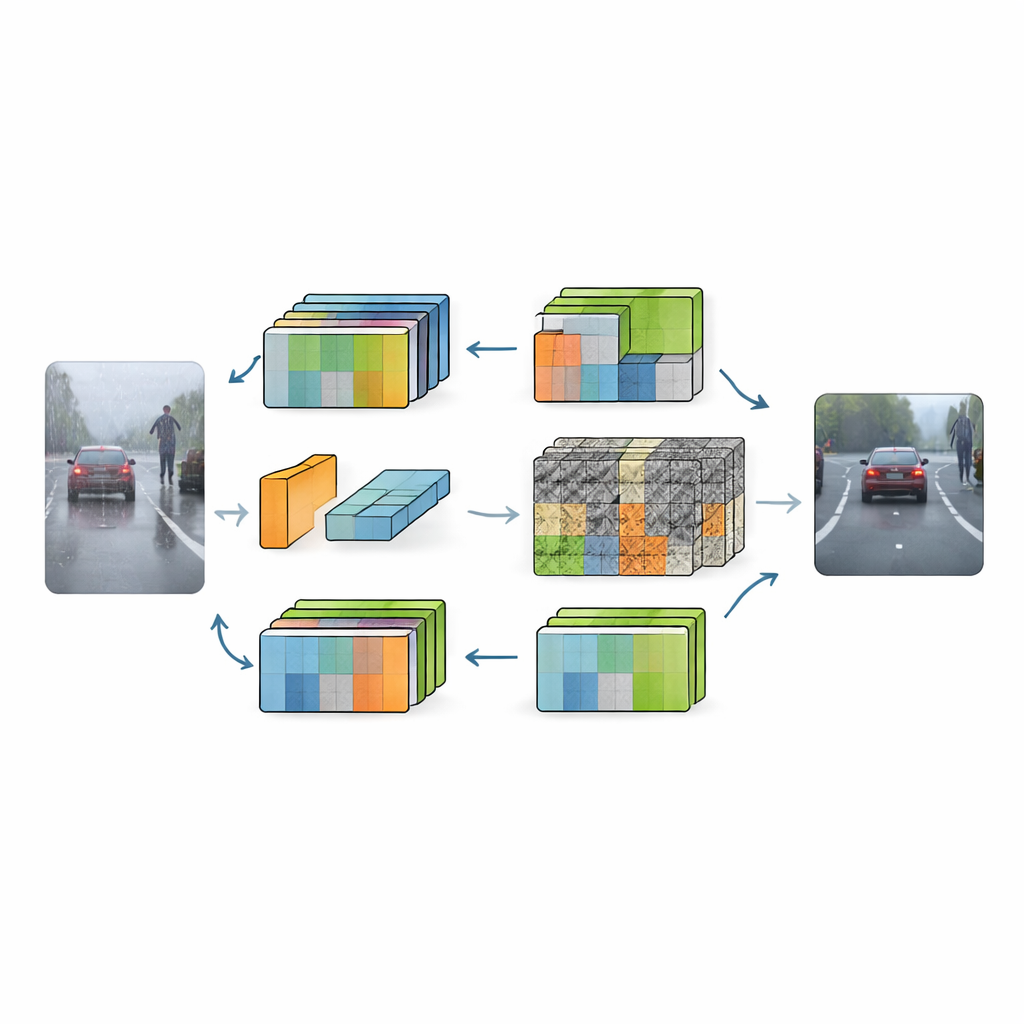
RFGLNetは異なる戦略でこの問題に取り組みます。標準的な昼間の都市シーンだけを学習しながら、広範な過酷な条件に一般化することを目指しています。著者たちは、豊かなシーン構造を捉えることで知られる大規模事前学習視覚モデルDINOv2を出発点にします。この重いバックボーンを最初から再訓練するのではなく、そのパラメータを固定し、上に軽量なモジュール群を追加します。これらのモジュールはスマートなアダプタのように機能し、スノーフレークや雨滴、暗闇による視覚的混乱で混同されにくいようにバックボーンの内部表現を再形成します。その結果、一般的なビジョンモデルと比べて非常に小さい、学習可能パラメータ4.32百万のみで、訓練中に見たことのない天候を扱うことを学習します。
ネットワークが天候をフィルタリングする仕組み
RFGLNetの第一の革新は、凍結したバックボーンの各層に差し込む低ランクモジュールです。訓練前に、このモジュールはシミュレートした特徴行列に対して特異値分解(SVD)と呼ばれる数学的手続を実行します。これにより、DINOv2の内部特徴の構造に概ね合致する小さな成分群を初期値として得られ、ランダムノイズから始めるよりも有利になります。訓練中はこれらの成分が調整され、モジュールはバックボーンのコアな知識を乱すことなく特徴を穏やかに補正できます。続いてネットワークはフーリエベースのアテンションブロックを適用し、特徴を周波数領域に移します。そこで、緩やかに変化する広域構造は意味ある物体を表す傾向があり、鋭く不規則なパターンはしばしば天候ノイズに対応します。高周波の雑音を抑え、より滑らかな成分を増幅することで、システムは全体的なシーン理解を強化しつつ干渉を低減します。
細部を鋭く保ちながら気を散らさない
グローバルな特徴がきれいになっても、車線標識、柵の手すり、遠方の歩行者の輪郭などの微細なディテールは悪天候でのぼけに依然として弱いままです。これに対処するため、著者らはデコーダ部分にグループ化された空間アテンションモジュールを導入します。すべての特徴チャネルを一緒に扱う代わりに、チャネルをグループに分け、各グループに対して個別の空間重みマップを学習します。エッジのような重要な構造を運ぶチャネルは強調され、ノイズに支配されるチャネルは抑えられます。これらのグループ固有のマップは統合されて全体の空間重み付けを形成し、複数の解像度で細部を強調し物体境界をシャープにします。実質的に、RFGLNetはどこを注意深く見るべきか、どこを霧や雨の粒子として無視するべきかを学びます。
過酷な道路シーンでの実世界の成果
手法の検証のため、研究者たちはRFGLNetを晴天の都市シーンで知られるCityscapesデータセットで訓練し、雨、雪、霧、夜間走行に焦点を当てたACDCデータセットで評価しました。訓練時にACDCのラベルを一度も見せていないにもかかわらず、RFGLNetは平均Intersection over Union(mIoU)78.3パーセントを達成し、より大きく計算負荷の高い複数の先行するドメイン一般化・適応手法を上回りました。特に、悪天候で境界が失われやすい壁や柵といった難しいクラスで強みを示しました。同時に、モデルは一般的な消費者向けGPU上で効率的に動作し、リアルタイム走行システムに必要な秒間数十枚の画像処理を実現しました。
より安全な自律性のための明瞭な視界
非専門家向けの要点は、RFGLNetがすべての嵐に対して延々と再訓練することなく既存のビジョンバックボーンを安全性向上のためにアップグレードする方法を示していることです。コンパクトな低ランクチューニング、周波数に基づくノイズフィルタリング、グループ化された空間アテンションを組み合わせることで、システムは本質的なシーン構造を保持しつつ天候に起因する雑音を取り除くことを学びます。こうした手法が成熟し、より広範な実世界の条件で訓練されれば、空が暗くなり前方の道路が明瞭でないときでも、自動運転車やロボットが信頼できる状況認識を維持するのに寄与する可能性があります。
引用: Ye, X., Shi, X. & Li, Y. RFGLNet for adverse weather domain-generalized semantic segmentation with frequency low-rank enhancement. Sci Rep 16, 8253 (2026). https://doi.org/10.1038/s41598-026-39052-y
キーワード: 自動運転, 悪天候の知覚, セマンティックセグメンテーション, コンピュータビジョンの堅牢性, ドメイン一般化