Clear Sky Science · ja
下肢リハビリテーションロボットの快適性向上のための深層強化学習に基づくヒューマノイド制御戦略
人が再び歩けるよう助けるロボット
脳卒中や脊髄損傷の後で歩行が困難になると、治療は遅く、疲れやすく、不快になりがちです。下肢リハビリテーションロボットは練習中に患者の脚を支え誘導するよう設計されていますが、現行機はしばしば硬く「ロボット的」に感じられます。本研究は、これらのロボットに高度な学習アルゴリズムを用いてより人間らしい「脳」を与えることで、訓練をより優しく、自然に、そして最終的に患者にとってより効果的にできるかを探ります。
なぜ歩行練習は自然に感じられる必要があるのか
人口の高齢化に伴い、重度の歩行障害を抱える人が増え、ロボット支援リハビリに頼るケースも増えています。従来のロボットは事前に設定された脚の軌道に従い、単純な制御ルールで関節を動かします。信頼性は高いものの、これらの方法は人間の動きの複雑さに対応しきれません。個々の歩容は微妙に異なり、硬直したロボットは不自然に引っ張ったり押したりして違和感や痛みを生じさせることがあります。著者らは、リハビリがうまく機能するためには、ロボットが患者を起立させて動かすだけでなく、自然な歩行パターンに適応し、身体に加える力を最小化する必要があると主張します。
実際の人間の歩行から学ぶ
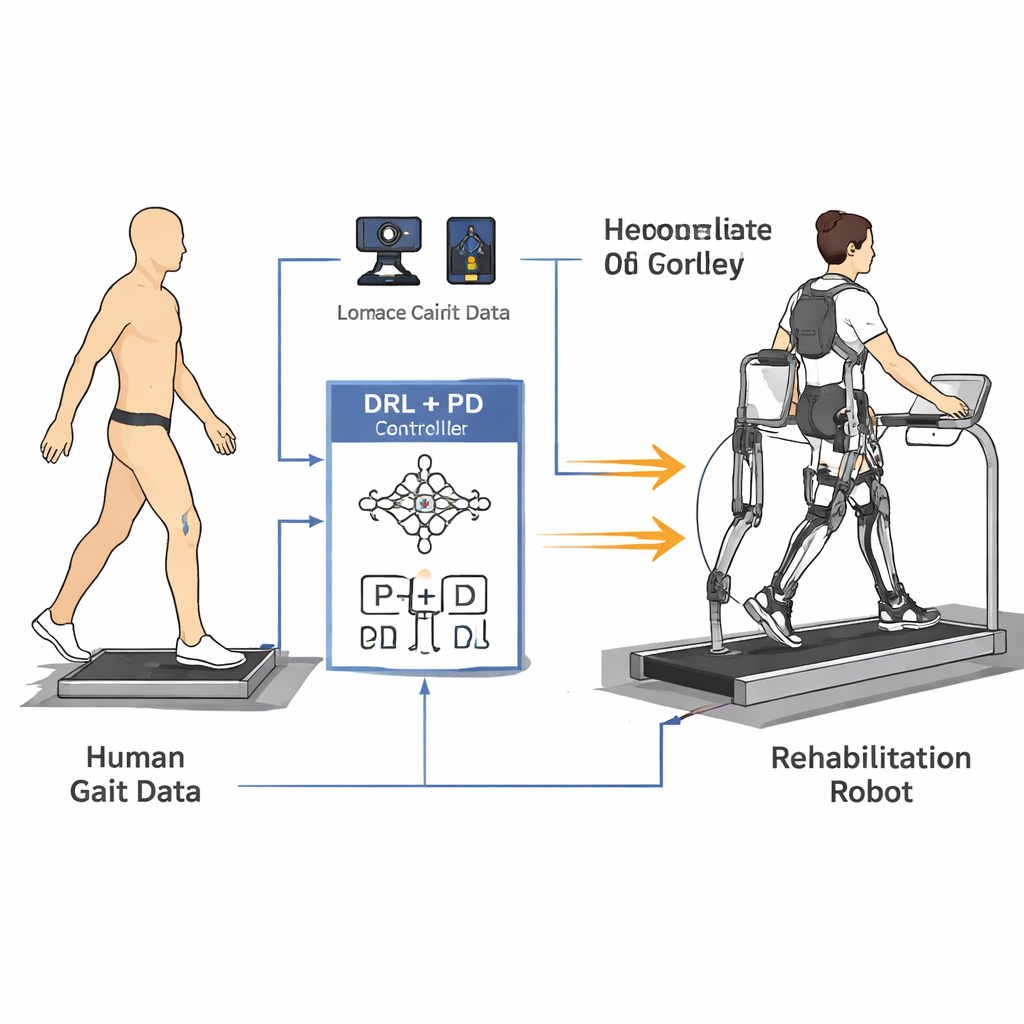
ロボットに人の歩行を教えるため、研究者たちはまず脚と胴体の簡略化された数学モデルを構築しました。次に、高精度の3次元モーションキャプチャシステムと床の力計を用いて、5名の健常被験者の歩行データを記録しました。腰、膝、足首、胴体に付けた反射マーカーから各関節が一歩を通してどのように動くかを計算し、足底のセンサーで各脚が地面にかける力を測定しました。これらの測定に基づき、股関節と膝関節の角度の滑らかな参照曲線を作成し、関節にかかる力の時間変化を追跡して、正常な歩行の形状とリズムの両方をとらえました。
より賢く、それでも安全を守る制御器
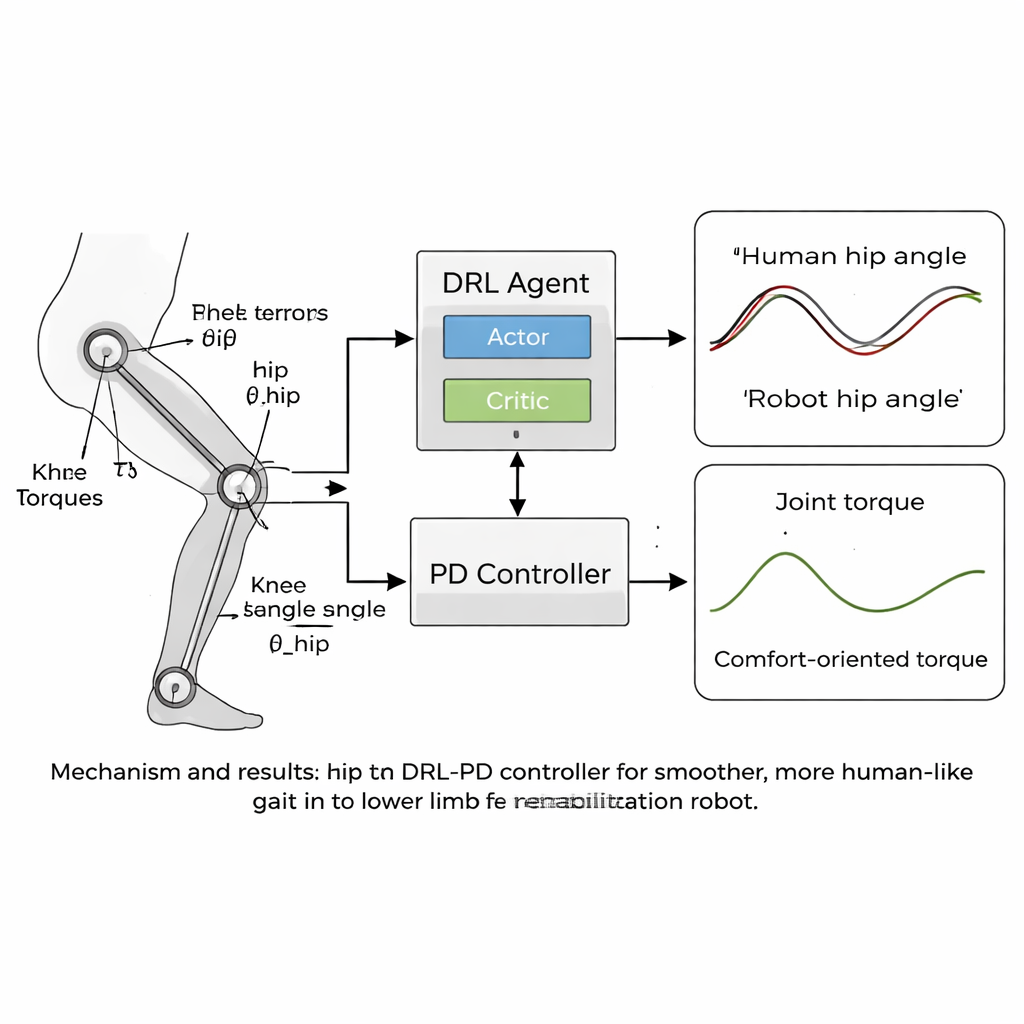
本論文の核心は、深層強化学習(DRL)と古典的な比例微分(PD)制御器を組み合わせた新しい「ヒューマノイド」制御戦略です。DRLは仮想エージェントが行動を試し、結果を観察し、報酬信号を最大化することで最善の方策を学ぶタイプの人工知能です。本ケースでは、エージェントはPD制御器の上位に位置します:ロボットの関節角と速度を観測してどのトルクを与えるかを決め、PD層は関節が安全で人間らしい目標角度から大きく逸脱しないようにします。報酬関数は、安定した前方歩行を促し、患者にとって不快となる振る舞い—ぎくしゃくした動き、大きな関節力、過度の傾きや低い足底クリアランスなどの危険な姿勢—を抑制するよう慎重に設計されています。
より滑らかな動きで、人間の歩行に近づく
研究チームは、股関節と膝関節が実測歩行データに一致する下肢リハビリテーションロボットモデルを用いてコンピュータシミュレーションで手法を検証しました。数千の学習エピソードを経て、DRL-PD制御器は関節角が人間の参照パターンに密接に追従する反復的な歩行サイクルを生成することを学びました。ロボットの股関節と膝は規則的で安定したループで動き、信頼できる再現性のある歩行を示しました。重要なのは、関節を駆動するために必要なトルクが標準的なPD制御器と比べてより滑らかで小さくなった点です。定量的指標では追従誤差が数百分の一ラジアンまで低下し、関節トルクの変化率—患者が感じる「ぎくしゃく感」の代理指標—は半分以上減少しました。さらに、脚の質量を数パーセント変動させても制御器は安定性を保ち、実際のユーザー間の違いに対して耐性があることが示唆されました。
将来のリハビリロボットにとっての意義
専門外の読者に向けた結論は明快です:実測データから人の歩行のリズムと限界を学習させ、滑らかで優しい動作を報いることで、患者がより自然に、ストレスを感じずに歩行練習できるロボットを設計できます。ロボットが患者と協調して動くなら、患者はより長く、より頻繁に訓練を続けやすくなるでしょう。現在の成果はシミュレーションに基づき学習には高性能な計算資源を要しますが、学習が完了すれば制御器は実機上で効率的に動作させることができます。著者らは、本研究を患者ごとの歩行や快適性のニーズに適応する個別化・適応型リハビリテーションロボットへの一歩と位置づけ、回復と生活の質の向上に寄与すると期待しています。
引用: Jin, Y., Zhang, J., Li, W. et al. A humanoid control strategy based on deep reinforcement learning for enhanced comfort in lower limb rehabilitation robots. Sci Rep 16, 7370 (2026). https://doi.org/10.1038/s41598-026-39011-7
キーワード: リハビリテーションロボット, 歩行訓練, 深層強化学習, 外骨格, 患者の快適性