Clear Sky Science · ja
自律型義肢の動作速度は、仮想現実における身体化、使いやすさ、ロボット的社会属性を形作る
ロボット腕の「動き方」が本当に重要な理由
ロボット義肢は年々高性能になり、失われた手足の機能を回復するだけでなく、身体の自然な一部のように感じられることが期待されています。しかし、意外に単純な問いが十分に検討されていませんでした:自律的な義肢の動く速度は、装着者にとってどれだけ「自然」に感じられるか、安全か、使いやすいかに影響を与えるのでしょうか?本研究は仮想現実を用いて、さまざまな動作速度がロボット腕が自分の一部に思えるか、代わりに反応してくれると感じるか、落ち着いたパートナーのように信頼できるか、それともぎこちない機械に見えるかをどう変えるかを調べました。
仮想のロボット腕を試す
この問いに取り組むため、研究者たちは被験者を没入型の仮想現実環境に置き、左前腕を欠損したデジタルボディを与えました。仮想世界では欠けた腕の部分が滑らかなロボット前腕に置き換えられ、前腕は自律的に曲がることができました。参加者は上腕と肩を操作しましたが、仮想の肘が光るターゲットに十分近づくと、義肢の前腕が自動で動いて到達動作を完了しました。その動きは、自然な人間の動きに似ることが知られている滑らかな「最小ジャーク(minimum‑jerk)」軌道に沿っていました。

6段階の速度、1つの単純な課題
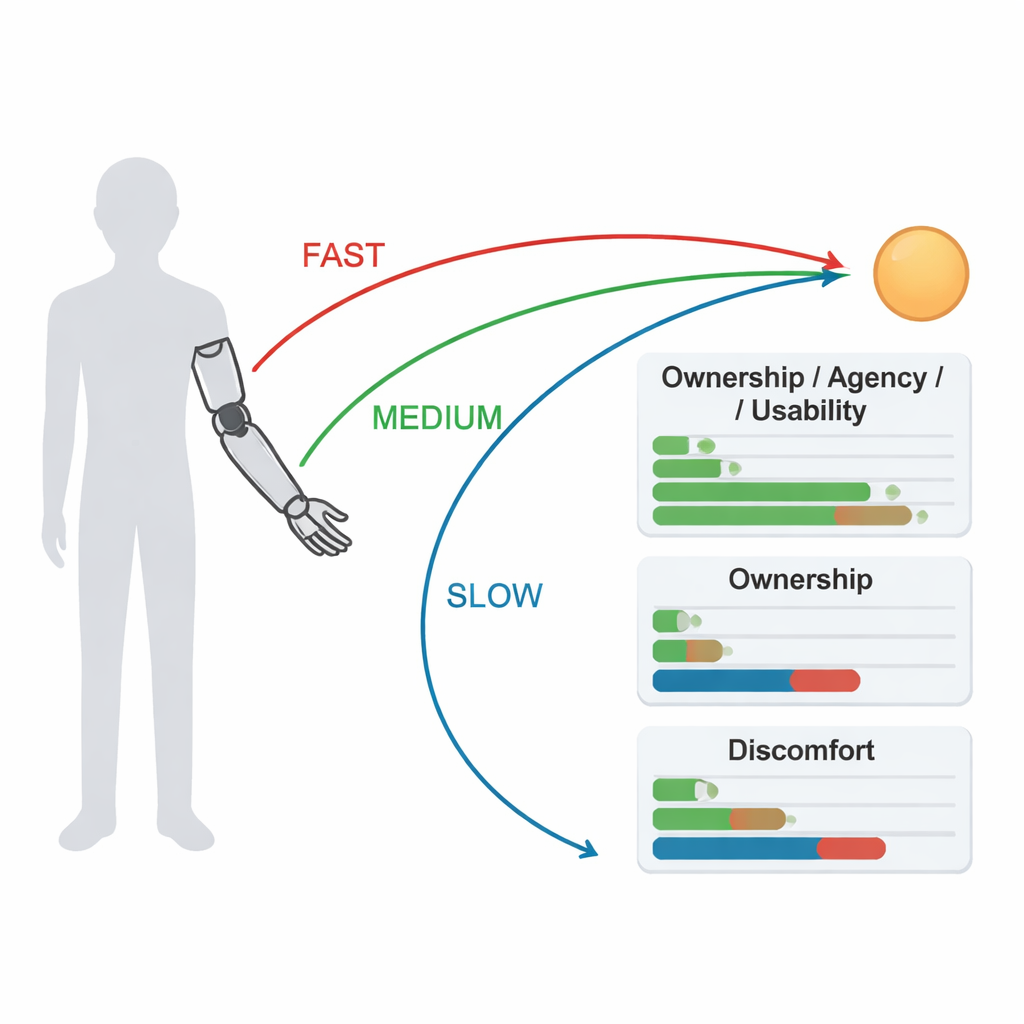
重要なポイントは、義肢の自動屈曲が非常に速くも遅くもできることでした。研究チームは、125ミリ秒という非常に速い動作から、ゆったりとした4秒まで、途中にいくつかの段階を設けた6つの動作時間を試しました。各速度条件で、参加者は一連の到達試行を行い、出現するターゲットにできるだけ速く触ろうとしました。各ブロックの後、彼らはその腕が自分のものだとどれだけ強く感じたか(身体所有感)、動きがどれほど「自分の」動きに感じられたか(エージェンシー感)、システムの使いやすさ、および能力感・温かみ・違和感といったロボット的な社会的特性について評価しました。研究者たちはまた、義肢が作動する前に被験者が実際に上腕をどれだけ速くターゲットに向かって動かしたかも計測しました。
中間の速度が最も身体の一部に感じられる
結果は明瞭でした:約1秒という中程度の動作時間が、身体所有感とエージェンシー感を最も強くし、使いやすさのスコアも最も高くしました。義肢が極端に速い(125ms)または極端に遅い(4s)場合、参加者はそれが自分の身体の一部であると感じにくく、代わりに行動してくれているとも感じにくくなりました。やや速めの0.5秒の動作も良好で、極端な条件と比べて高い所有感とエージェンシーを維持しました。このパターンは、自律的な肢が自然で有用に感じられる「適正速度」の範囲があり、動作を速めすぎたり遅くしすぎたりすると脳がその装置を身体像に統合しにくくなることを示唆しています。
快適さ、能力感、そして人々の適応
腕の速度がその「性格」を形作る様子もまた示唆に富んでいました。中程度の速度の動きは、最も遅い動きよりも有能だと評価される傾向があり、一方で非常に速い動きは最も違和感を生じさせ、単体ロボットに関する以前の知見と一致しました。興味深いことに、温かみ(おおまかに言えば腕がどれほど親しみやすく接しやすいかの評価)は速度によってあまり変わりませんでした。人々は自分の行動も微妙に変えており、義肢が遅く動くときは実際の上腕をターゲットに向かってよりゆっくり動かす傾向があり、無意識にロボットのペースに合わせているかのようでした。この適応は、一度自律肢の一部が身体化されると、ユーザーがより良く協調するために自身の動作を調整する可能性を示唆します。
将来の義肢にとっての意味
専門外の読者に向けた要点は明快です:自律的な義肢の動作速度は単なる技術的設定ではなく、ユーザーがその装置を真に自分の一部と感じるか、安全で有能だと感じるかを直接左右します。本研究の健常参加者を対象とした仮想現実実験では、動作時間がおよそ1秒の動きが所有感、制御感、使いやすさのバランスを最もよく高め、超高速の動きが引き起こす不安を回避しました。より高度な義肢やウェアラブルロボットが日常生活に入ってくるにつれ、より多くのセンサーや賢いアルゴリズムを追加することと同じくらい、動作速度を人間らしく快適な範囲に慎重に調整することが、これらの装置を有効な道具であると同時に本当に暮らしやすい身体の延長にするために重要になるかもしれません。
引用: Hapuarachchi, H., Inoue, Y., Shigemasu, H. et al. Movement speed of an autonomous prosthetic limb shapes embodiment, usability and robotic social attributes in virtual reality. Sci Rep 16, 7750 (2026). https://doi.org/10.1038/s41598-026-38977-8
キーワード: 義肢, 仮想現実, 身体化, ヒューマン・ロボット相互作用, 動作速度