Clear Sky Science · ja
補間フィルタの二段階手法に基づくビデオ認識のための車両軌跡データ再構成戦略
デジタル交通データのクリーンアップが本当に重要な理由
交通カメラが交差点を通過する車を撮影するたびに、それぞれの車がどこへ行き、どのくらいの速度で移動し、どのように加減速したかを記述する見えないデータの流れが生まれます。この情報は、道路の安全性向上、スマートな信号制御、将来の自動運転車にとって非常に価値あるものです。しかし現実にはそのデータは乱雑です:トラックの後ろに隠れる車、雨に反射するヘッドライト、そしてコンピュータビジョンの誤認識。 本研究は非常に実用的な疑問に取り組みます——欠陥のある映像データを、実際の車両の動きを信頼できる記録にどのように変えるか?
カメラが車の動きを誤読するとき
映像ベースの追跡は安価で非侵襲的、かつ広範囲をカバーできるため魅力的です。しかし生の出力には主に二つの問題があります。第一は明らかな誤りで、車が後ろに跳ぶように見えたり、高速から瞬時に停止したり、あり得ない急加速が記録されたりします。これらは遮蔽、モーションブラー、あるいは追跡ソフトが一時的に車両を見失うことから生じます。第二の問題はランダムなジッター—報告された位置の小さく急速な揺らぎです。速度や加速度をこれらの位置から算出すると、揺らぎが増幅され、通常の走行が乱れたように見えてしまいます。放置すると、これらの問題は交通モデルを40%以上歪め、安全性研究や自動運転システムを誤導する恐れがあります。
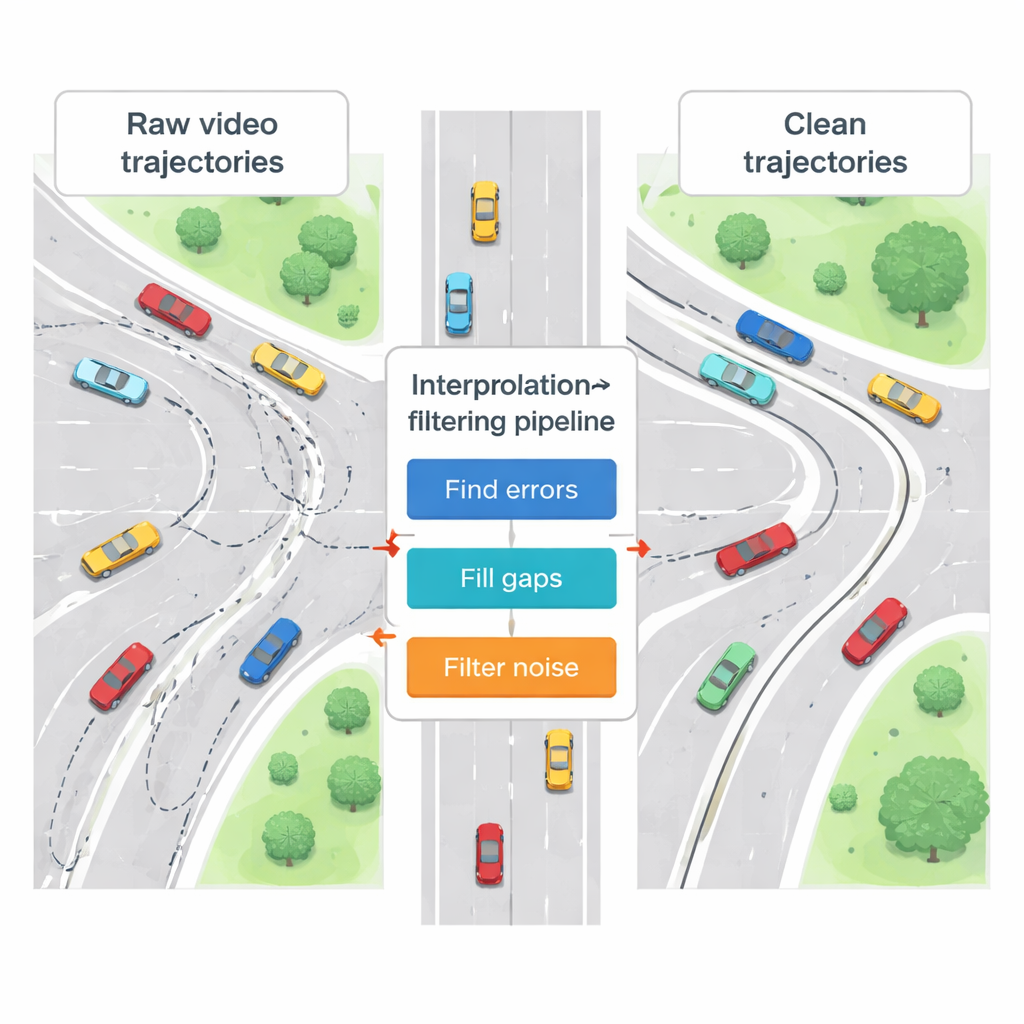
二段階のクリーンアップ計画
この損傷を修復するために著者らは、注意深いデジタル整備士のように機能する二段階の再構成戦略を提案します。第一段階は明らかな誤りに注目します:各車両の記録を走査して、非常に急なジャーク(加速度の極端な変化)や現実の車と運転者が許容できる範囲を超える加速度など、単純な物理的限界を破る速度・加速度の点を検出します。これらの外れ値が見つかると、周囲のより信頼できる点から欠損値を推定する補間という数学的手法で置換されます。本研究は複数の補間手法を比較し、特に動きが複雑な場合に、エルミート補間(Hermite補間)が従来のラグランジュ法より軌跡の自然な形状をよりよく保持することを示します。
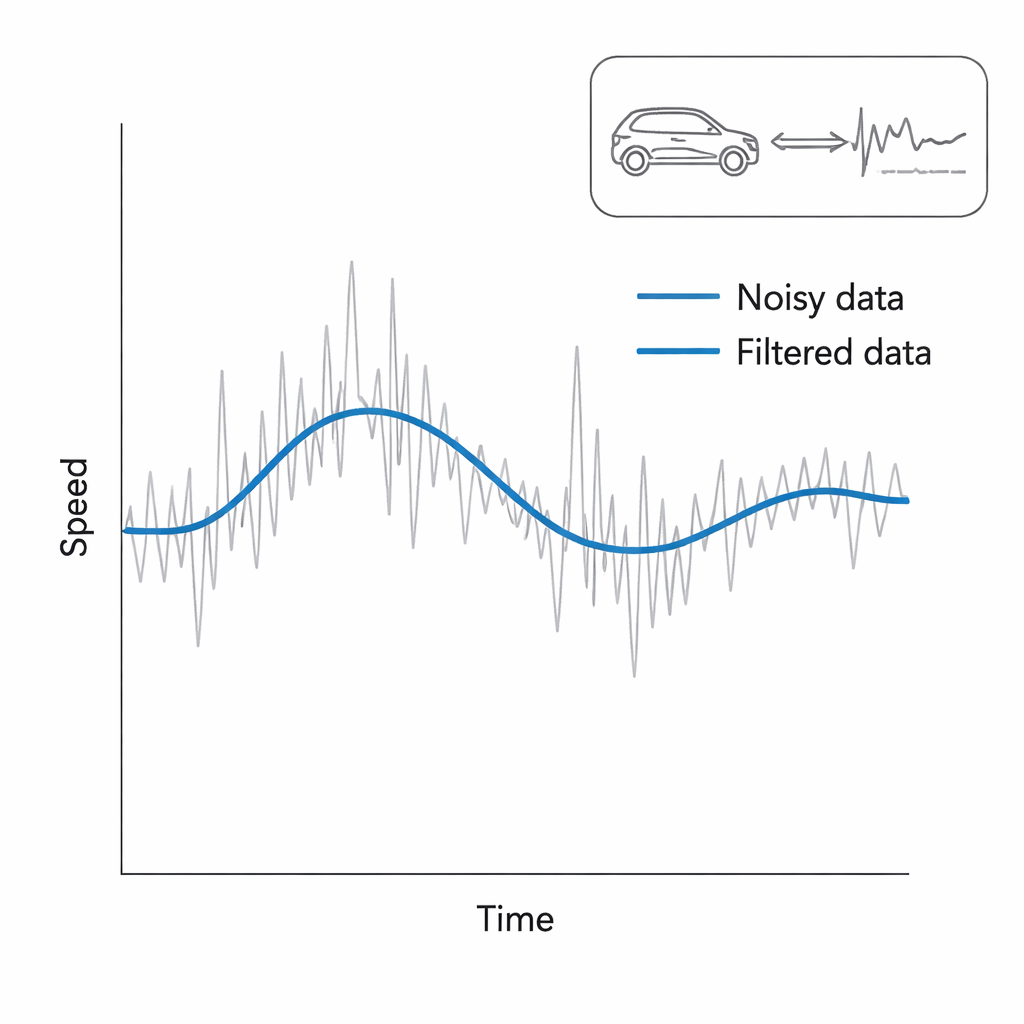
デジタル走行を滑らかにする
第二段階はノイズというより微妙な問題に対処します。大きな誤りを修正した後でも、残る軌跡はわずかに揺らいで見えることがあります。ここで研究者らはデータを平滑化する二つの方法を試します:最近の点により重みを与える改良移動平均法と、カルマンフィルタとして知られる統計的手法です。カルマンフィルタは新しい観測が到着するたびに車の真の位置と速度の最良推定を継続的に更新します。どちらの手法もジッターを抑えますが、カルマンフィルタは例えば穏やかなブレーキや車線変更といった実際の運転変化をぼかすことなく追跡する点で優れています。その結果、各車両が時間を通じて実際にどのように振る舞ったかをより滑らかで現実的に記述できます。
手法の実地検証
このチームは現実の映像データにフレームワークを適用しました。場所は中国・鄭州の交通量の多い都市交差点で、最新の物体検出および追跡ソフトを用いて車両の軌跡を抽出しています。次に多数の異なる車両トレースを二段階プロセスに通し、成功を単純な物理的指標で評価します:加速度の変動がどれほど大きいか、ジャークが乗用車にとって非現実的とされるレベルをどのくらいの頻度で超えるか。さらに、映像からクリーンアップした軌跡を車両のダッシュボード計器から直接記録したグラウンドトゥルースと比較します。安定巡航、急ブレーキ、車線変更といった多様な走行パターンにわたり、補間とフィルタリングを組み合わせた戦略は加速度の変動を約85%低減し、実現しにくいジャークのスパイクをほぼ除去するとともに、複数の競合手法よりも計器記録に近い結果を示しました。
日常の交通にとっての意味
平たく言えば、本論文は普通の交通カメラから得られる不完全な映像を、エンジニアや自動化車両が実際に信頼できるデータに変える方法を示しています。まず明らかな欠陥を修復し、その後ノイズを慎重に平滑化することで、特殊なハードウェアや膨大な計算資源を必要とせずに、車の動きを現実的に再現するデジタルトレースを生成します。そのきれいなデータは信号制御の最適化、渋滞のより正確なシミュレーション、実世界の運転挙動理解を前提とする自動運転アルゴリズムの安全性向上に役立ちます。本研究は一都市を対象とし、まだすべての天候や道路条件を網羅しているわけではありませんが、既存のビデオネットワークを次世代のインテリジェント輸送システムの信頼できるセンサーとして活用するための明確かつ実用的な道筋を示しています。
引用: Ding, S., Zhang, S., Peng, F. et al. Reconstruction strategy of vehicle trajectory data for video recognition based on a two-step method of interpolation filtering. Sci Rep 16, 7428 (2026). https://doi.org/10.1038/s41598-026-38947-0
キーワード: 車両軌跡, 交通ビデオデータ, データの除雑音, インテリジェント輸送, 自動運転