Clear Sky Science · ja
風とペイロード擾乱に対するESOベースの適応ニューラルネットワーク制御によるクアドロータ制御
乱れた現実世界でもドローンを安定させる
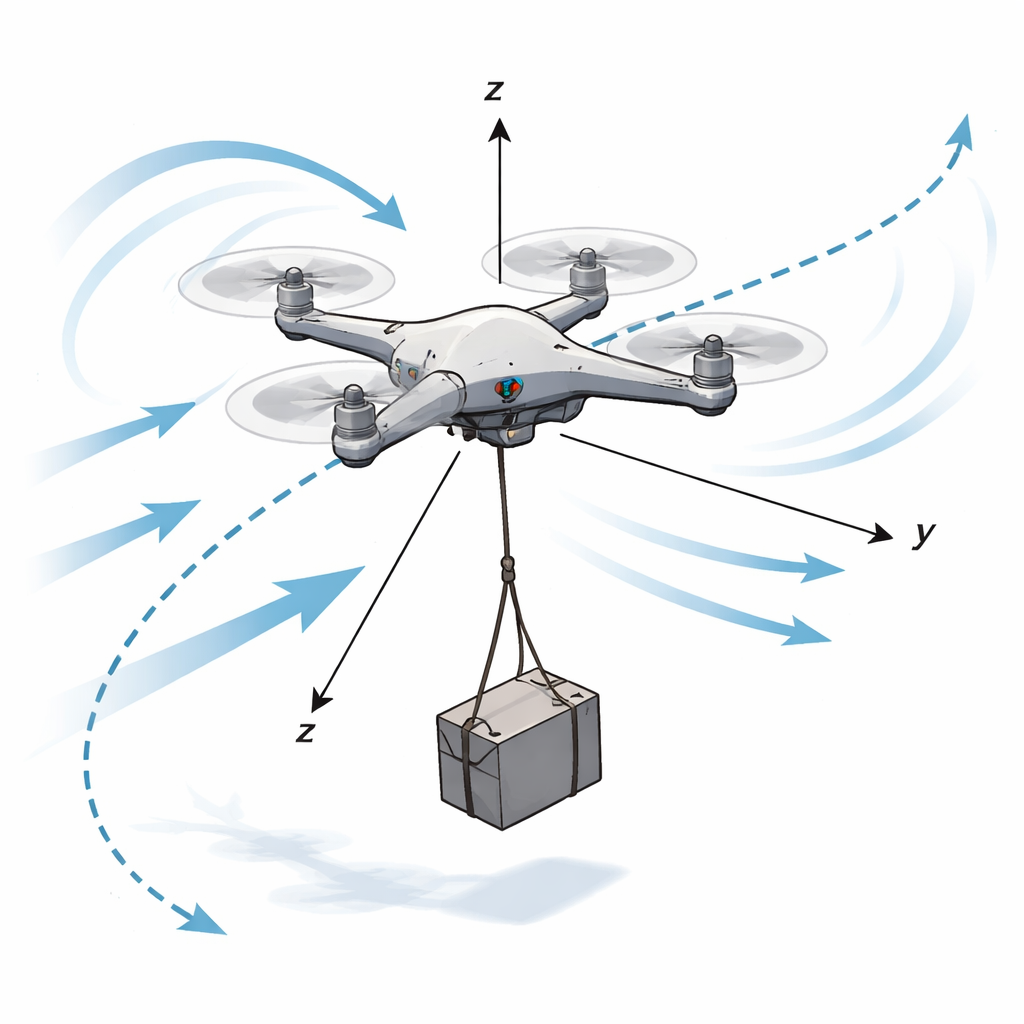
小型の四ロータドローンは、橋の点検、作物の監視、小荷物の輸送などの用途でますます利用されています。しかし現実世界では、これらの飛行ロボットは突風や機体下にぶら下がる荷物の揺れに直面し、いずれも簡単に航路を乱します。本稿は、空気が荒れていて揺れるペイロードに引かれても、計画した経路に沿って滑らかに飛行させ続ける新しい方法を提示します。
なぜ風とぶら下がった荷物は厄介なのか
クアドロータは本質的に制御が難しい機体です。軽量でモーターの小さな変化に素早く反応し、各方向の運動が密接に結びついています。強風や急変する風が当たると、ドローンは予測しにくい力を受けます。カメラ装置や液体ボトルのようなケーブルで吊るされたペイロードが加わると状況はさらに悪化します:ペイロードは振り子のように振れて追加の力を機体に返します。PIDが広く使われていますが、スライディングモードやバックステッピングのような高度な手法であっても、機体の物理を非常に正確に知っていて擾乱が小さい場合にのみうまく機能します。モデルが正確でない、あるいは風やペイロードの力が複雑に変化する場合、これらの手法は応答が鈍くなったり、オーバーシュートや飛行中の目に見える揺れを生じたりします。
隠れた擾乱のためのスマートな見張り役
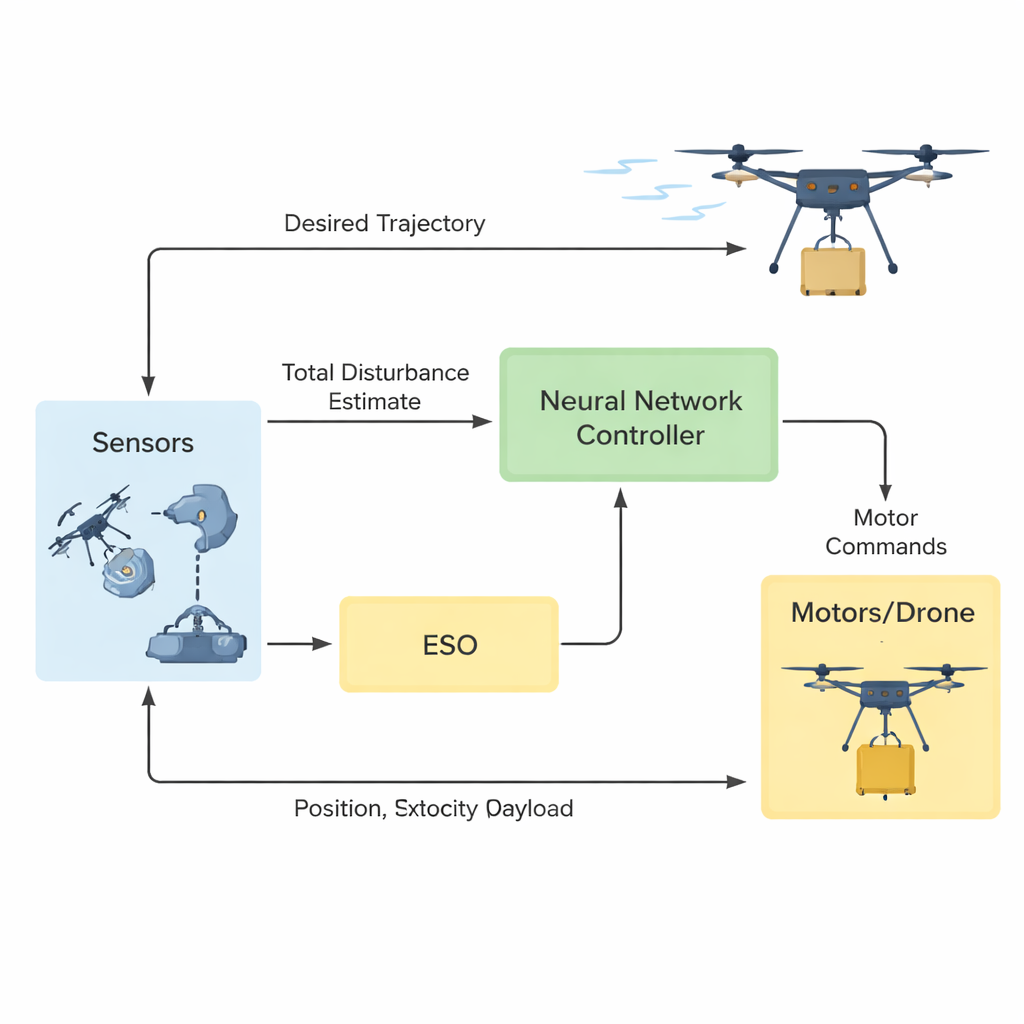
これに対処するため、著者らは能動的擾乱拒絶(active disturbance rejection)という概念を発展させます。風や揺れるペイロードのすべての未知の影響を詳細にモデル化する代わりに、それらを単一の「まとまった(lumped)擾乱」として扱います。特別に設計された拡張状態オブザーバは数学的な見張り役のように機体の動きからこの総合的な擾乱を常に推定します。注目すべきは、彼らのオブザーバが主要なパラメータを一つだけで調整されることで、既存の多くの設計より設定が大幅に簡素化されている点です。理論的解析により、適切にチューニングすればオブザーバの擾乱推定は速やかに収束し厳密に有界であり、単なるおおまかな推定ではなくリアルタイムなフィードフォワード補正として信頼できることが示されています。
難しい部分をニューラルネットワークに学ばせる
良好な擾乱推定があっても、コントローラはモーターの指令が実際の運動にどう変換されるかを知る必要があります。この関係は質量や形状などの物理特性に依存し、時間とともに変わることがあります。詳細に同定されたモデルに頼る代わりに、著者らは放射基底関数(RBF)ニューラルネットワークを導入し、飛行信号からこの関係を直接学習させます。コントローラが必要とするのは機体の現在位置、目標位置、および目標経路の二階微分(目標点の加速度)だけです。適応則によりニューラルネットの内部重みを継続的に更新して追従誤差を低減します。ライプノフに基づく解析を用いて、著者らはこの適応スキーム下で追従誤差が一様に有界であり任意に小さくでき、重みの更新が安定であることを証明しています。
手法の検証
研究チームはコンピュータシミュレーションと実機実験の両方で手法の検証を行っています。シミュレーションでは、ランダムな突風や時間とともに変化するペイロード力を受けながら、挑戦的な三次元のらせん軌道を追従させます。新しいコントローラは、線形能動擾乱拒絶、スライディングモード制御、モデルフリー終端スライディングモード制御、より難しい試験では適応分数階制御といった三つの他の高度手法と比較されます。複数のシナリオにわたり、提案手法は擾乱導入後に特に軌道が滑らかで位置の二乗平均誤差が小さい成果を示しました。実機試験では屋内でクアドロータを飛行させ、二台の工業用ファンで風を当て、200グラムの水ボトルをぶら下げます。モーションキャプチャカメラで位置を記録します。連続した風と手動でのペイロードの引きによっても、機体は目標点を数センチ以内に保持し、モーター指令は良好な振る舞いを保ちました。これは本手法が実際のハードウェアに適用可能であることを示唆します。
日常的なドローン利用への意味
非専門家にとっての要点は、本研究が内部物理の完全な知識を必要とせずに荒れた条件下でドローンをより信頼できるものにする手段を提供することです。シンプルだが強力な擾乱オブザーバと学習ベースのコントローラを組み合わせることで、システムは突風や揺れる荷物に対してその場で適応し、最小限の調整で機体を航路に保ちます。この種のロバストでモデル依存度の低い制御は、都市、農場、工場での日常的なドローン運用を容易にし、将来的には複数機編隊や一部のコンポーネント故障時にも安全に飛行し続ける耐故障設計へと発展する可能性があります。
引用: Cai, X., Dai, J., Liu, F. et al. ESO based adaptive neural network control for a quadrotor against wind and payload disturbances. Sci Rep 16, 7758 (2026). https://doi.org/10.1038/s41598-026-38931-8
キーワード: クアドロータ制御, ドローンの安定性, 風の擾乱, ニューラルネットワークコントローラ, ペイロード追従