Clear Sky Science · ja
PCAホワイトニングはフーリエ記号での視覚的場所認識の照明耐性を向上させる
屋内で道を見つけるロボット
ある日明るい日差しが差し込み、別の日には薄暗いランプの下を走るロボットを想像してください。自分の位置を知るためにロボットは今カメラが見ている映像を以前に保存した画像と照合します。しかし照明が大きく変わると、同じ場所でもほとんど別物に見えることがあります。本稿は、パノラマ画像から場所を認識する軽量で数学的な手法を検討し、PCAホワイトニングという統計的トリックがこの手法を照明変動に対していかに頑健にするかを示します。
世界をピクセルではなく波として見る
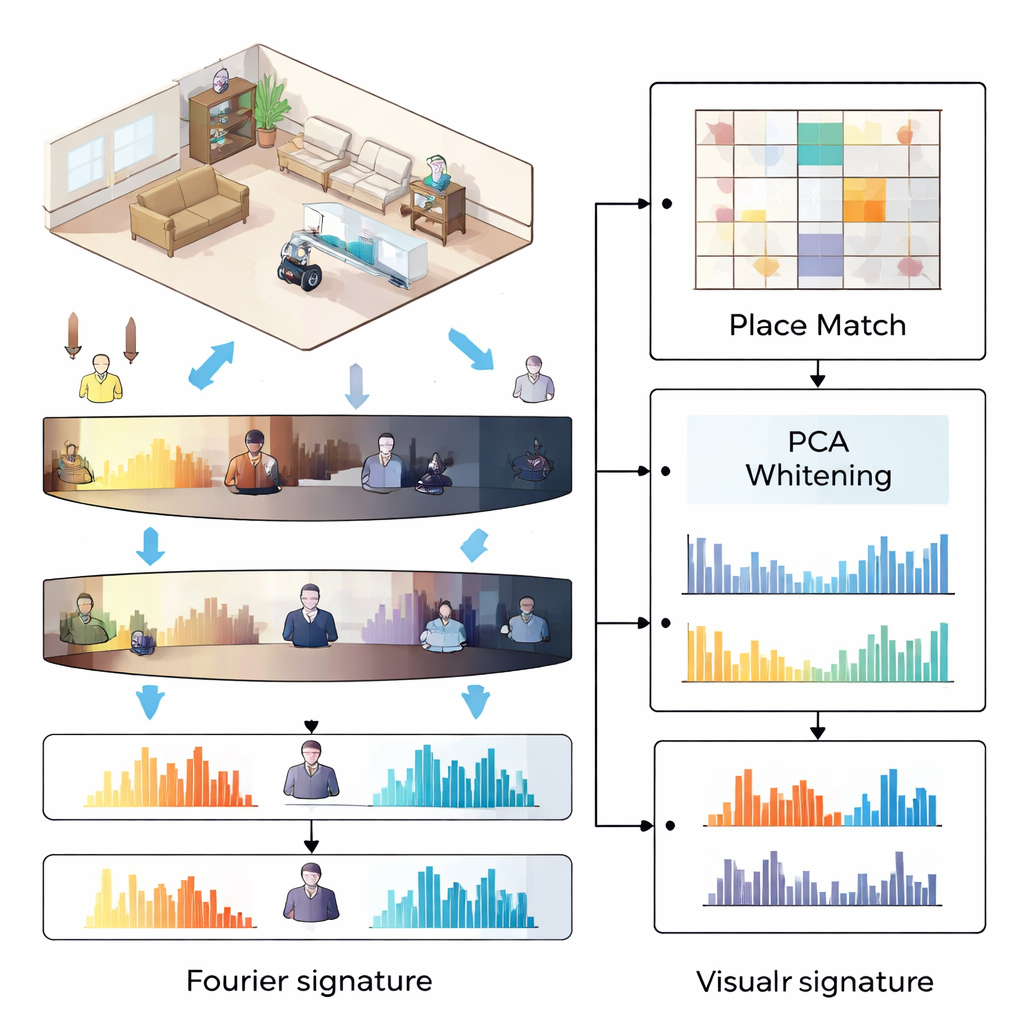
現在の多くの視覚的場所認識システムは、画像中のエッジやコーナー、テクスチャなど多数の小さな局所特徴を取り出し、それらを圧縮して「指紋」を作ります。対照的に本研究はフーリエ記号に基づき、パノラマ画像をピクセルの格子ではなく異なる周波数の波の混合として扱います。カメラは360度の視界を捉え、パノラマを水平の帯に分割して各帯を一次元の周波数スペクトルに変換します。最低周波数の振幅だけを残して積み重ねて記述子とします。円周上のどこに特徴が現れるかの情報を破棄するため、ロボットが単に回転しても記述子はほとんど変わらず、回転に対して自然に頑健になります。
なぜ照明で単純な記号が壊れるのか
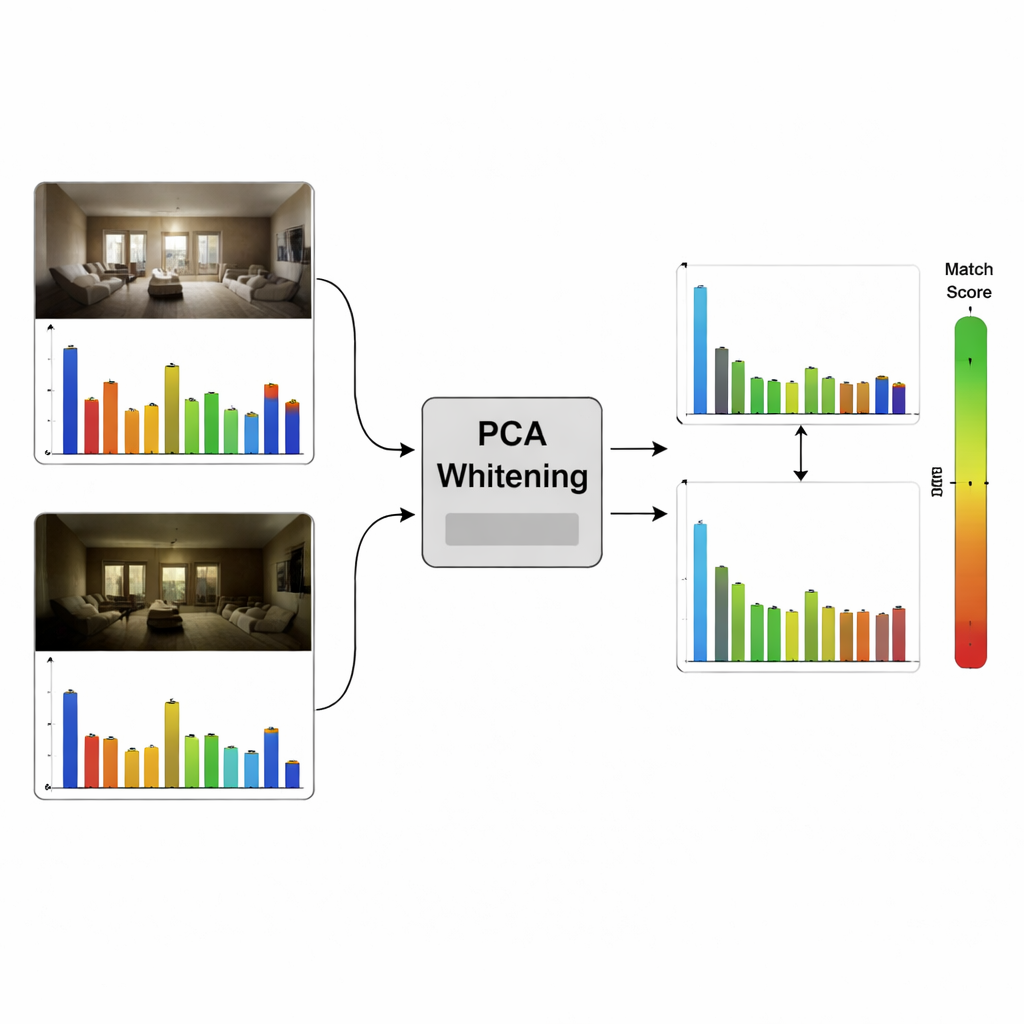
フーリエ記号はコンパクトで高速に計算できる一方で、同じ場所を記録したときに照明が大きく変わると苦戦します。自然画像は低周波に高いエネルギーを持ちやすく、この不均衡は照明によって変わります。その結果、記述子の一部が類似度測度を支配し、パノラマの隣接する行が似ているために多くの要素が強く相関します。補正がないと、二つの画像が同じ場所かどうかの判断はごく小さな冗長な値の部分集合に左右され、異なる照明条件下で脆弱になります。
PCAホワイトニングで信号を整える
著者はフーリエ記述子に対して後処理としてPCAホワイトニングを追加することを提案します。七つの屋内環境から集めた学習用パノラマ群を用いて、記述子の要素がどのように変動し相関するかを学習します。PCAホワイトニングは記述子を中心化し、独立した変動方向に回転させ、各方向を同じ影響力になるように再スケーリングします。これにより冗長な相関が除かれ、異なる周波数の寄与がバランスされます。変換後の要素は重要度で並ぶため、末尾を切り落とすだけで安全に短縮することもできます。複数の照明バリエーションがある見えない三つの環境での実験では、ホワイトニングにより正しい場所が上位候補に入る確率が一貫して向上し、特に現実的な運用点である少数の候補リストを返す場合に顕著でした。
軽量でありながらディープラーニングに対抗
この合理化された手法が現在の潮流と比べてどうかを評価するため、論文は大規模なビジョントランスフォーマーネットワークに基づく最近の視覚的場所認識法であるAnyLocと比較しています。AnyLocもPCAに基づく圧縮を用いるものの、出発点は深層学習が生成する高次元特徴です。パノラマ屋内データセットでは、ホワイトニングしたフーリエ記号はシステムが最大で約10件程度の候補画像を提案できる場合にAnyLocと同等かそれ以上の性能を示します。多くのロボットにとってこれは現実的な運用点です。重要なのは、フーリエベースの手法は実行コストが格段に低いことです:高速フーリエ変換とCPU上の単純な行列演算に依存するのに対し、AnyLocは高性能GPUと画像ごとにより長い処理時間を必要とします。
日常のロボットにとっての意味
一般読者への核心的なメッセージは、古典的な数学の賢い使い方が特定のタスクにおいて依然として大規模な人工知能に匹敵し得るということです。パノラマ画像をバランスが取れ相関の除去された記述子に変換することで、PCAホワイトニングは単純な周波数ベースの場所認識手法を照明変動に対して遥かに強くします。この手法を使うロボットは、控えめな計算資源で家庭やオフィスの多様な照明条件下でも確実に自己位置推定できるようになり、将来私たちの身近な空間を共有するかもしれない小型で低コストのロボットにとって堅牢な視覚ナビゲーションの実現がより身近になります。
引用: Offermann, L. PCA whitening improves the illumination tolerance for visual place recognition with Fourier signatures. Sci Rep 16, 6148 (2026). https://doi.org/10.1038/s41598-026-38929-2
キーワード: 視覚的場所認識, 移動ロボット, パノラマ撮影, フーリエ記号, PCAホワイトニング