Clear Sky Science · ja
化学プラントの安全な航行への応用を含む,自律移動ロボットのための動的操舵制御を備えた拡張純追従法
軌道を外れないロボット
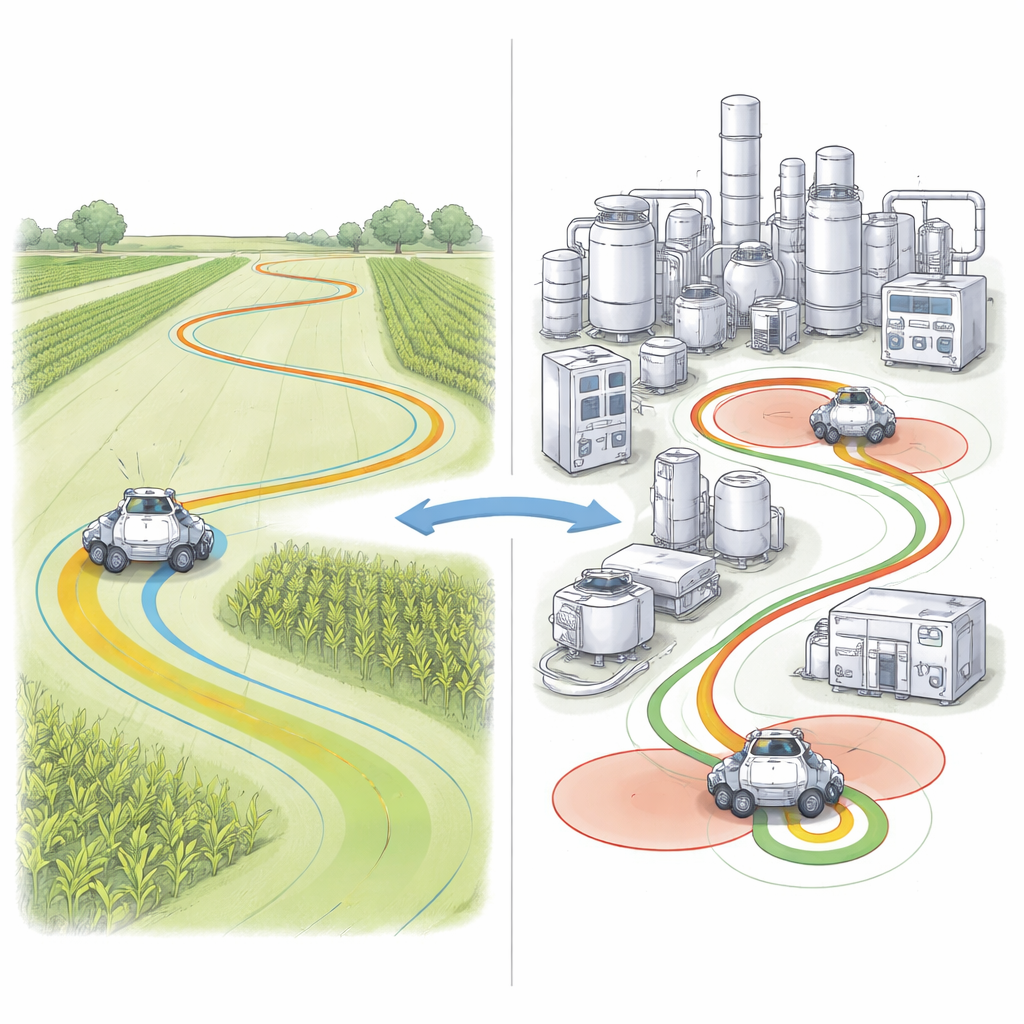
ロボットがクリーンな工場内から農地や化学プラントのような現場に進出するにつれて、狭い経路を高精度でたどる必要が生じます。小さな揺れでも作物を押しつぶしたり、配管にぶつかったり、可燃性ガスが存在する区域に転落する原因になり得ます。本稿は、台上走行ロボットが広い場所でも狭い産業現場でも計画した経路に近づいて走行できるように、操舵と速度を制御する新しい方法を述べます。
ロボット誘導が難しい理由
今日の多くの自律移動ロボットは,「純追従(pure pursuit)」と呼ばれる単純な規則を使って経路を追います。ロボットは経路上の一定の先点を見据え,その点に向かって操舵し,この処理を高速で繰り返します。実務では,先点までの距離(ルックアヘッド距離)と移動速度をどう決めるかが問題になります。ルックアヘッド距離が短すぎるとロボットは過敏に反応して蛇行しやすく,長すぎると反応が遅れてコーナーを大きく切りすぎます。特に急な曲線や高速走行時に顕著です。屋外ではさらに複雑な事情が加わります:位置推定は衛星信号,慣性センサ,車輪の回転データを組み合わせて行われますが,それぞれに固有の誤差や遅延があります。
より賢い操舵と速度設定法
著者らは純追従を拡張したPure Pursuit with Dynamic Steering Control(PP-DSC)という手法を提案します。ルックアヘッド距離と速度を固定する代わりに,ロボットは曲率(操舵角の大きさ)に応じてこれらをリアルタイムに調整します。操舵角が小さく経路がほぼ直線のときは,長めのルックアヘッドと高めの速度を用いて滑らかで効率的に移動します。曲がりがきつくなるとルックアヘッドを短くし速度を自動的に落とすことで,応答時間を稼ぎ横方向のずれを抑えます。この振る舞いは四輪車のようなロボットに実装され,現代的なロボティクスソフトウェアフレームワーク,精密な衛星測位,慣性センサ,車輪エンコーダを組み合わせて自己の運動を推定しています。

野外と仮想化学プラントでの試験
PP-DSCの有効性を確かめるため,研究チームは野外で直線,ループ,フィギュアエイトの三種の基本経路を速度1〜5 m/sで走行する実験を行い,従来の純追従法と比較しました。改良コントローラはあらゆる条件で目標経路にずっと近く追従しました。直線では平均横ずれが約5センチに低下し,曲線でも誤差は8センチ未満に保たれました。これに対し従来法は数十センチのドリフトを示し,特に高速で曲がりに入る・出る際に誤差のピークが大きくなりました。
危険区域での安全性の付加
研究者たちは,このようなロボットが化学プラント内で熱反応器の点検や試料運搬などを行う場合を想定して挙動を検討しました。実機の産業テストベッドを構築する代わりに,装置の配置や火災・爆発リスクの高いゾーンを含むバイオディーゼルプラントの詳細なコンピュータモデルを使用しました。コントローラに安全係数を組み込み,プロセス安全で用いられる標準的な火災・爆発指標に基づいて危険ゾーン内に入ると自動的に速度を落とすよう拡張しました。シミュレーションでは,この安全配慮型のPP-DSCは追従誤差を平均で1%未満しかわずかに増やさずに,危険設備周辺でロボットの速度を低減することを確認しました。
用途に応じた手法の選択
興味深い知見として,単一の操舵戦略が常に最良というわけではないことが示されました。緩やかな曲線のある開けた野外では,動的手法が従来法を明確に上回り,高速時でも経路を狭く滑らかに保てました。一方で化学プラントのような狭い空間では,固定ルックアヘッドの純追従が,特にきついループや自己交差するフィギュアエイト経路では有利な場合がありました。動的ルックアヘッドは誤って経路の別枝を選んでしまうことがあるためです。著者らは,経路形状に応じて戦略を切り替えることを提案しています:中程度の曲率や危険認識が必要な走行では拡張された安全統合型コントローラを用い,非常に狭いループや自己交差があるトラックでは固定ルックアヘッド方式に切り替える、という方針です。専門外の読者への要点は,実際のプラントや野外での安全で信頼できるロボット航行は良い地図やセンサだけで成り立つわけではなく,ロボットがどこを“見る”か、どれだけの速度で進むかの選び方も同じくらい重要だということです。
引用: Promkaew, N., Junhuathon, N., Phuphaphud, A. et al. Enhanced pure pursuit with dynamic steering control for autonomous mobile robots and application to safe navigation in chemical plants. Sci Rep 16, 8820 (2026). https://doi.org/10.1038/s41598-026-38695-1
キーワード: 自律移動ロボット, 経路追従, 操舵制御, GNSS-RTKナビゲーション, 化学プラントの安全性