Clear Sky Science · ja
マカクの腹側前運動野活動に基づく皮質内ブレイン・マシン・インターフェース
脳にカーソルを動かす方法を教える
筋肉が動かせなくなっても、考えるだけでコンピュータのカーソルやロボットアームを操作できると想像してみてください。ブレイン–マシン・インターフェース(BMI)は、脳活動を外部機器のコマンドに変換することでそれを可能にしようとする技術です。これまでの多くのシステムは脳の主要な運動領域に頼ってきましたが、脳卒中やALSなどでその領域が損なわれた場合はどうなるでしょうか。本研究は、通常は手の動作の計画や他者の動作の観察に関連する別の近接領域が、BMIを確実に駆動できるかを問いかけます。
新たな脳領域がチームに加わる
従来のBMIは主に随意運動を直接制御する一次運動皮質や、近接する計画領域である背側前運動野の信号を読み取ってきました。研究者たちは別の隣接領域、腹側前運動野のうちF5cと呼ばれる領域に注目しました。マカクでは、F5cには動作中や物体をつかむときに発火する細胞が豊富に存在し、画面上の動作を単に観察しているだけでも反応する細胞が見られます。このような運動と観察の反応が混在する特性は、身体を動かさなくてもカーソルやロボット“アバター”を制御するのに向いている可能性があることを示唆しました。
サル、マイクロ電極、そして動くターゲット
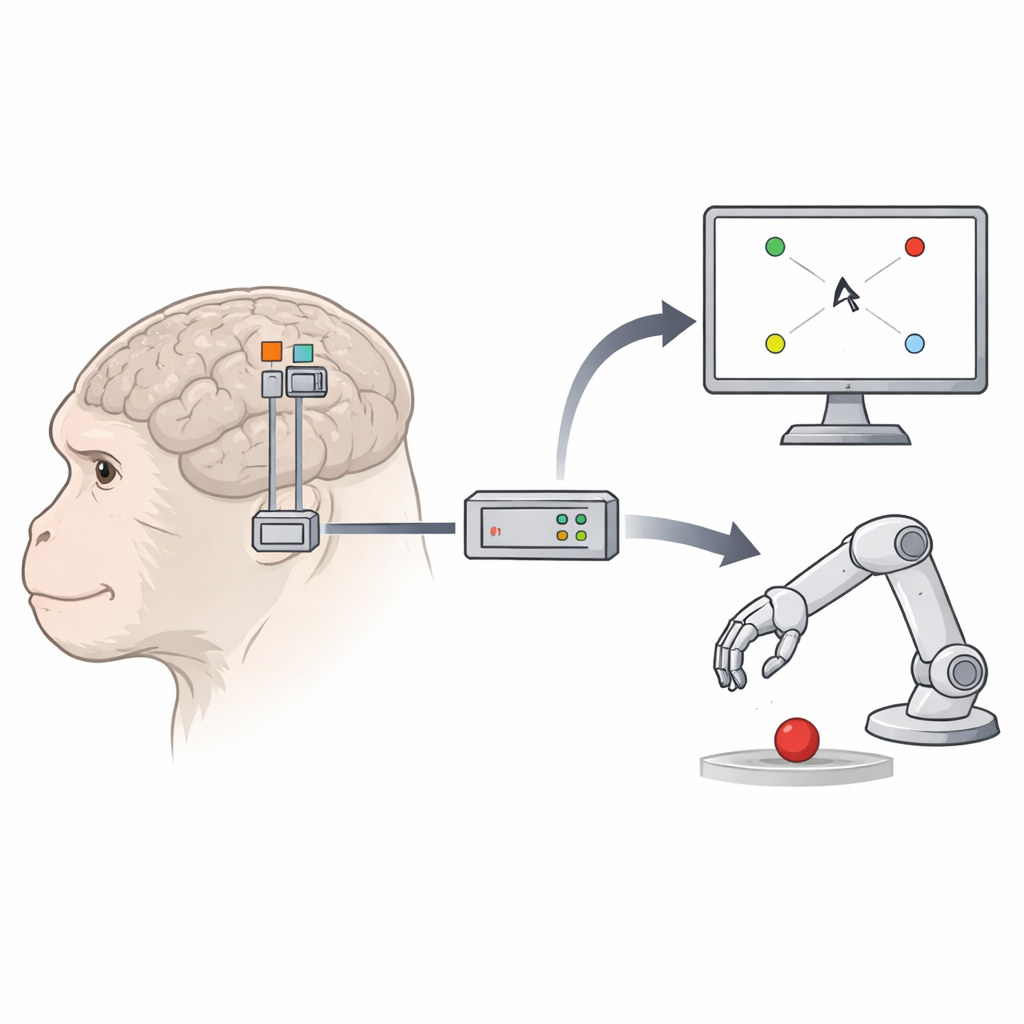
2匹のマカクに、96電極の小型グリッドを一次運動皮質、背側前運動皮質、F5cの3箇所に埋め込みました。日々のセッションで、被験動物は視覚的には単純だが行動的に要求の高い複数の課題を行いました。ある課題では、画面中央に触れた後、8つの外側ターゲットのいずれかに到達し、その際小さな画面上の四角いカーソルが中心から同じターゲットへ移動しました。別の課題では、手を静止させたままカーソルがターゲットへ移動するのをただ観察しました。より実物に近い設定では、カーソルが3Dロボットアームのアバターに置き換わり、仮想シーン内のターゲットに向かって到達しました。これらの課題を通じて、各脳領域がカーソルやアバターの動きをどの程度駆動できるかを比較できました。
脳信号が滑らかな動きになる仕組み
訓練段階では、カーソルやアバターはコンピュータ生成の穏やかに曲がる経路に沿って動き、サルは動作するか観察するかのいずれかを行いました。同時に電極は迅速な脳活動のバーストを記録しました。研究者たちはデコーダー──脳の発火パターンを画面上のカーソルやアバターの速度に対応づけることを学習する数学的ツール──を訓練しました。最も情報量の多いチャンネルだけを取り込むために、活動が運動の方向や速度と追従する電極を選びました。行動に最も結びつく脳パターンを抽出する方法に、非線形の工程を加えて、神経活動と運動とのより複雑な関係を捉えられるようにしました。デコーディング段階では、コンピュータがカーソルやアバターを駆動するのを止め、代わりにデコーダーがライブの脳信号を用いて50ミリ秒ごとに画面上の動きを操舵しました。神経応答が時間とともに変化するため、デコーダーはバックグラウンドで定期的に再訓練され、適応するようにしました。

「新しい」領域の性能はどれほどか?
重要な疑問は、F5cが従来の制御領域の性能に匹敵するか、あるいは近づけるかどうかでした。両方のサルで、F5cに基づくデコーディングは初期にはカーソルを動かす際に遅れを示し、特にサルが自分の手を動かさずに観察しているときに顕著でした。しかしセッションが進み、より多くの電極が信頼できる運動関連信号を提供するようになると、F5cは追いつきました。いくつかの条件では、その性能は一次運動皮質と同等になり、受動的なカーソル制御においては後半のセッションでそれを上回ることさえありました。ロボットアバターの制御では、全領域にわたって全体的な成功率は低めでしたが、F5cは依然として有意義な制御を支え、とくにアバターをターゲットへ穏やかに導く補助アルゴリズムと組み合わせた場合に有効でした。重要な点として、3領域のニューロンは、コンピュータ駆動の訓練段階と能動的制御段階の双方で、方向チューニングや集団活動のパターンが類似しており、学習に伴って好まれる方向を変えたのはその一部に限られていました。
将来の神経技術にとっての意義
専門外の方に向けた重要な結論は、行動の計画や観察を担うと考えられてきた腹側前運動野F5cが、実用的なBMIの制御ハブとしても機能し得るということです。十分な運動関連信号が得られれば、F5c活動に基づいて訓練されたデコーダーは、画面上のカーソルや支援ロボットを古典的な運動領域に基づくものと同等に、あるいは近い精度で導くことができます。これは将来の臨床用BMIが単一の皮質領域に依存する必要がないことを示唆します。一次運動皮質が損傷している人々にとって、腹側前運動野のような近接する計画領域が、デジタルツール、義肢、移動支援機器の制御を取り戻すための代替経路を提供する可能性があります。
引用: De Schrijver, S., Garcia Ramirez, J., Iregui, S. et al. An intracortical brain-machine interface based on macaque ventral premotor activity. Sci Rep 16, 8407 (2026). https://doi.org/10.1038/s41598-026-38536-1
キーワード: ブレイン・マシン・インターフェース, 運動皮質, 前運動野, 神経デコーディング, 義肢制御