Clear Sky Science · ja
非線形システムにおける予測センサ・アクチュエータ故障の検出、補償、制御のための仮想構造ベースのタイプ3ファジィシステム
部品が故障しても機械を正常に保つ
工場のロボットアームから酸度を制御する化学プラントまで、現代の技術はセンサやアクチュエータに依存して静かに稼働しています。しかし、これらの部品がズレたり固着したり故障したりすると、誰かが気付くよりずっと前にシステムは危険な状態になり得ます。本稿は、エンジニアがシステムの内部挙動を正確に記述する数学モデルを持っていない場合でも、機械が自律的にこうした問題を感知し補正できる新しい方法を提示します。
見えない問題が捕らえにくい理由
実世界の多くの環境では、システムの挙動は強く非線形であり、入力のわずかな変化が出力に大きく予期しない影響を与えます。従来の制御手法は設計者が挙動を支配する方程式を知っていること、そしてセンサとアクチュエータが概ね期待どおりに動作することを前提とします。実際には部品は経年変化で劣化したりノイズが増えたり、わずかに異なるハードウェアに置き換えられたりします。従来のフォールトトレラント制御は固定の安全余裕を組み込む(受動的方法)か、正確なモデルに基づいて故障を検出・補償する(能動的方法)いずれかですが、時間とともにシステムが変化したり内部構造が完全には分かっていない場合、どちらのアプローチも苦戦します。著者らは、稼働中のデータから学習し、センサやアクチュエータの不具合を認識し、詳細な設計図なしでリアルタイムに補正できるコントローラが産業界に必要だと論じます。
システムをブラックボックスとして扱う学習コントローラ
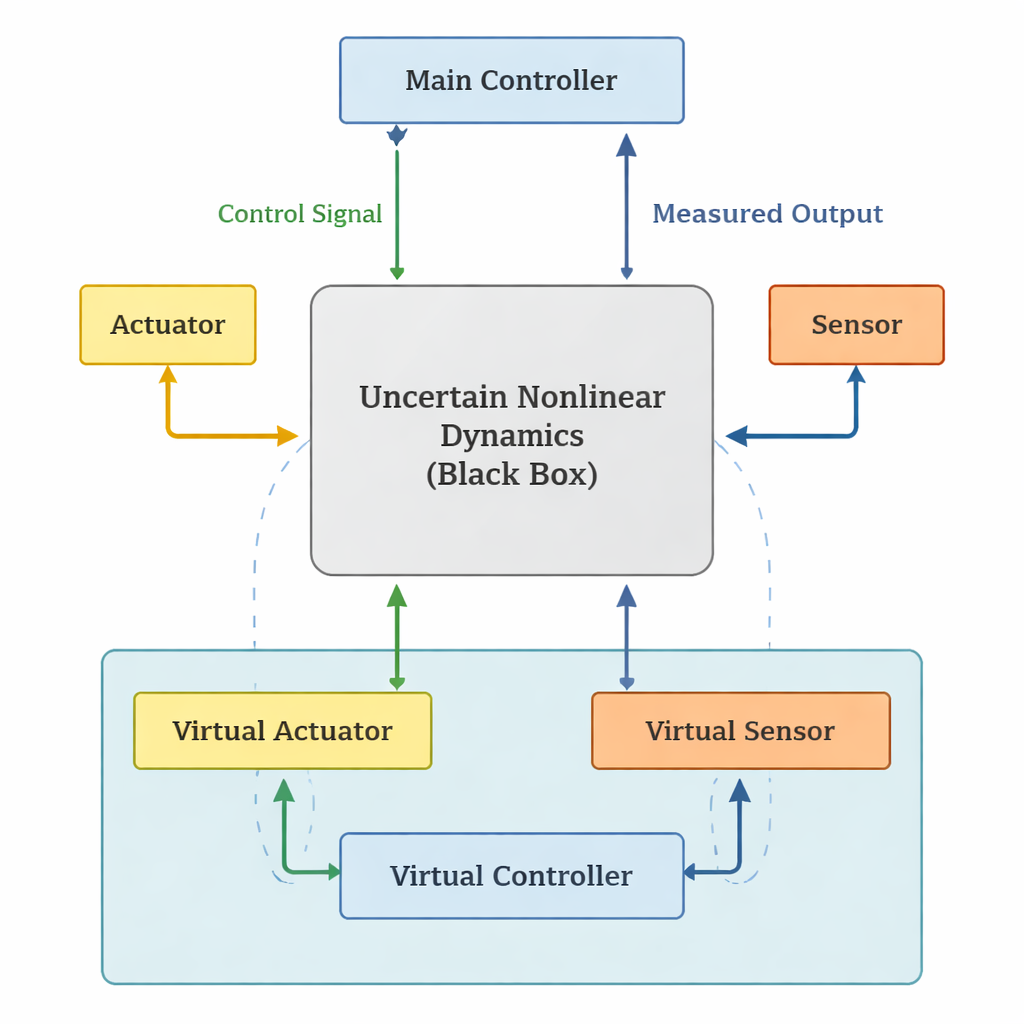
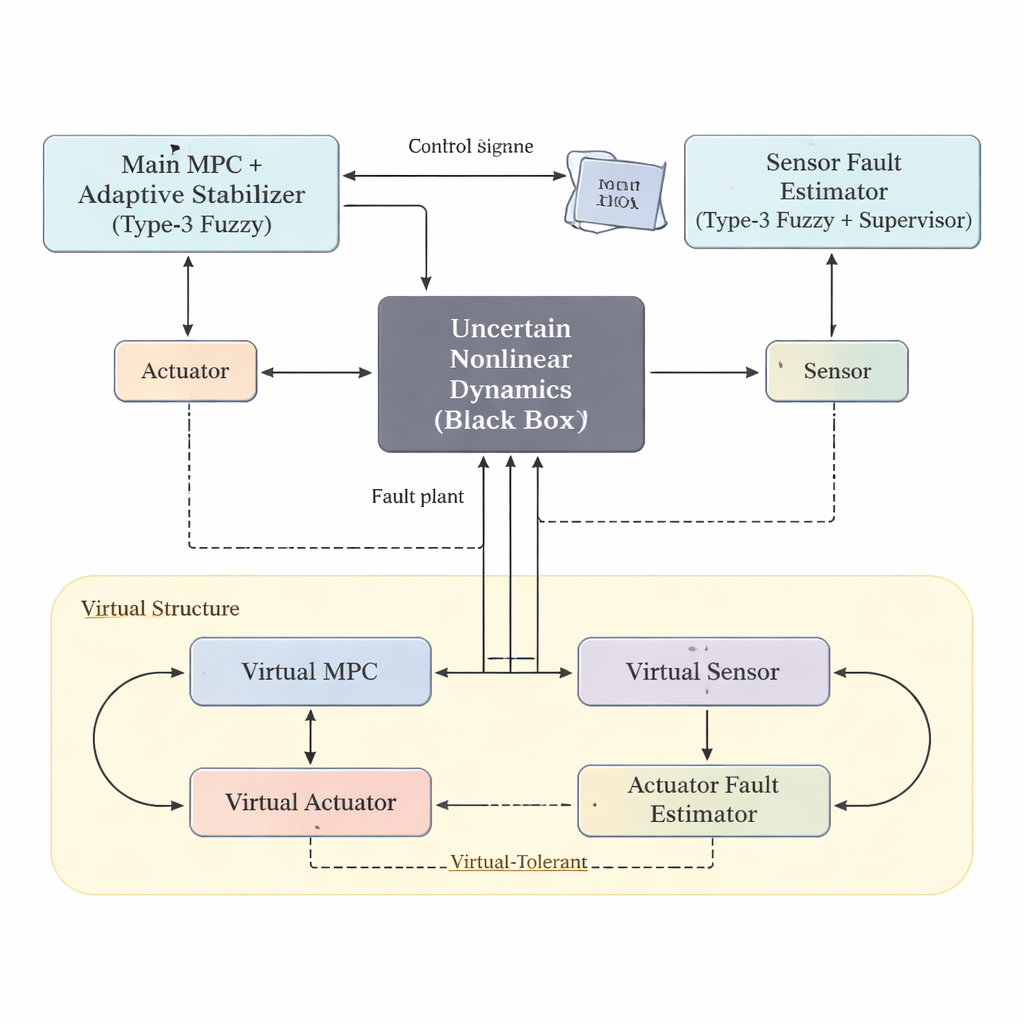
提案フレームワークはプラントを純粋にブラックボックスとして扱います:出力として測定される値と入力として送られる制御信号のみを観測します。その中核にはタイプ3ファジィロジックシステムがあり、強い不確実性や測定ノイズを扱うために設計された高度なファジィモデリングです。このファジィシステムはオンラインで未知のダイナミクスの簡潔な入出力記述を学習し、モデル予測制御(MPC)はその学習モデルを用いて短いホライズン上で将来の制御動作を計画します。並行して動作する適応安定化ユニットがあり、モデルが不完全であったりパラメータがドリフトしても、統合されたフィードバックにより追従誤差を有界に保ち最終的にゼロへと導くことを保証します。
監視装置を監視する:センサとアクチュエータの故障検出
フレームワークは故障処理を二つの連携した部分に分けます。まず、センサ故障ユニットは追加の二つのタイプ3ファジィ推定器と監視ブロックを用いて、センサ読み値が期待される定常値からどれだけずれているかを推定します。これに基づいて、主要コントローラが信頼できる出力を見続けられるように、故障測定を効果的に「打ち消す」補正信号を生成します。次に、手法は実システムを鏡像する仮想構造を構築します:仮想センサ、仮想アクチュエータ、独自のファジィ識別器、および仮想MPCを含みます。仮想ループは実アクチュエータの劣化を受けないため、仮想経路と実経路の差分が実際のアクチュエータ故障の程度を明らかにします。この差を単純な式で故障レベルの推定値に変換し、主要制御信号で補償します。
安定性の証明とロボットおよび化学タンクでの試験
本アプローチが直感的であるだけでなく数学的に堅牢であることを示すために、著者らは追従誤差、モデリング誤差、調整可能なファジィパラメータを含むライアプノフ関数(いわばエネルギー尺度)を構成します。適応項の更新則を導出し、このエネルギーが常に減少することを示すことで、摂動や故障があっても誤差が時間とともに縮小することを実証します。シミュレーションでは単軸ロボットアームと化学タンク内のpH中和プロセスという二つの非常に異なる例で手法を検証します。両ケースとも真のダイナミクスを完全に未知として扱い、パラメータは変動し、センサおよびアクチュエータの故障を運転中に注入します。コントローラは精度の高い追従を維持し、故障の大きさを迅速に学習し、リスクと誤差指標を低く保ち、より単純なファジィコントローラや文献中の他の高度なフォールトトレラント手法より優れた性能を示しました。
実システムへの示唆
専門外の読者向けに要点を述べると、この手法は複雑なシステムに内蔵された自己認識のような能力を与えます。完璧なモデルやエンジニアによる手動再調整に依存する代わりに、コントローラは観測データから継続的に学習し、センサやアクチュエータが誤動作したり性能が低下したりしたときにそれを検出し、自動的に動作を補正して性能を安定させます。入力と出力のデータだけを必要とするため、原理的には多くの異なる機械に対して大規模な再設計なしに適用可能です。結果はシミュレーションに基づくものであり、ハードウェア面での課題は今後の検討が必要ですが、本研究は部品や環境が理想的でない状況でも信頼性を保てる、より回復力のあるロボットや産業プロセス、その他の自律システムに向けた道を示しています。
引用: Hong, X., Zhakiyev, N., Yedilkhan, D. et al. A virtual-structure-based type-3 fuzzy system for predictive sensor and actuator fault detection, compensation, and control in nonlinear systems. Sci Rep 16, 7153 (2026). https://doi.org/10.1038/s41598-026-38456-0
キーワード: フォールトトレラント制御, ファジィ論理, モデル予測制御, センサおよびアクチュエータの故障, 非線形システム