Clear Sky Science · ja
水中環境における海洋ごみ検出のための改良型YOLOv11ネットワーク
水中ゴミの発見が重要な理由
海面下の深い場所では、プラスチック袋やボトル、釣り糸などのごみが静かに蓄積していきます。これらのごみは海洋生物に害を与え、敏感な生息地を塞ぎ、科学者が海を調査・保護するために使う水中ロボットの動作にも影響を及ぼすことがあります。本稿で要約する論文は、濁ったり対象が混在する水中でも、カメラやロボットがリアルタイムで自動的にごみを検出してラベル付けできるようにする、より賢いコンピュータビジョンシステムについて述べています。
海中でクリアに見ることの難しさ
陸上の明るい日中写真とは異なり、水中画像は暗く、かすんでおり、青や緑に色づくことが多いです。光は深度とともに急速に減衰し、砂やプランクトンが水を濁らせ、ごみは往々にして小さく部分的に隠れていたり、岩や植物と似た外観を示したりします。従来の画像処理手法はこのような条件で苦戦し、最新の深層学習検出器であっても微小な対象を見落としたり、背景のテクスチャをごみと誤認したりします。それでも、汚染のマッピングや清掃ロボットの誘導、海洋ごみの時間変化の追跡には、正確かつ高速な検出が不可欠です。
高速ビジョンの主力を土台に
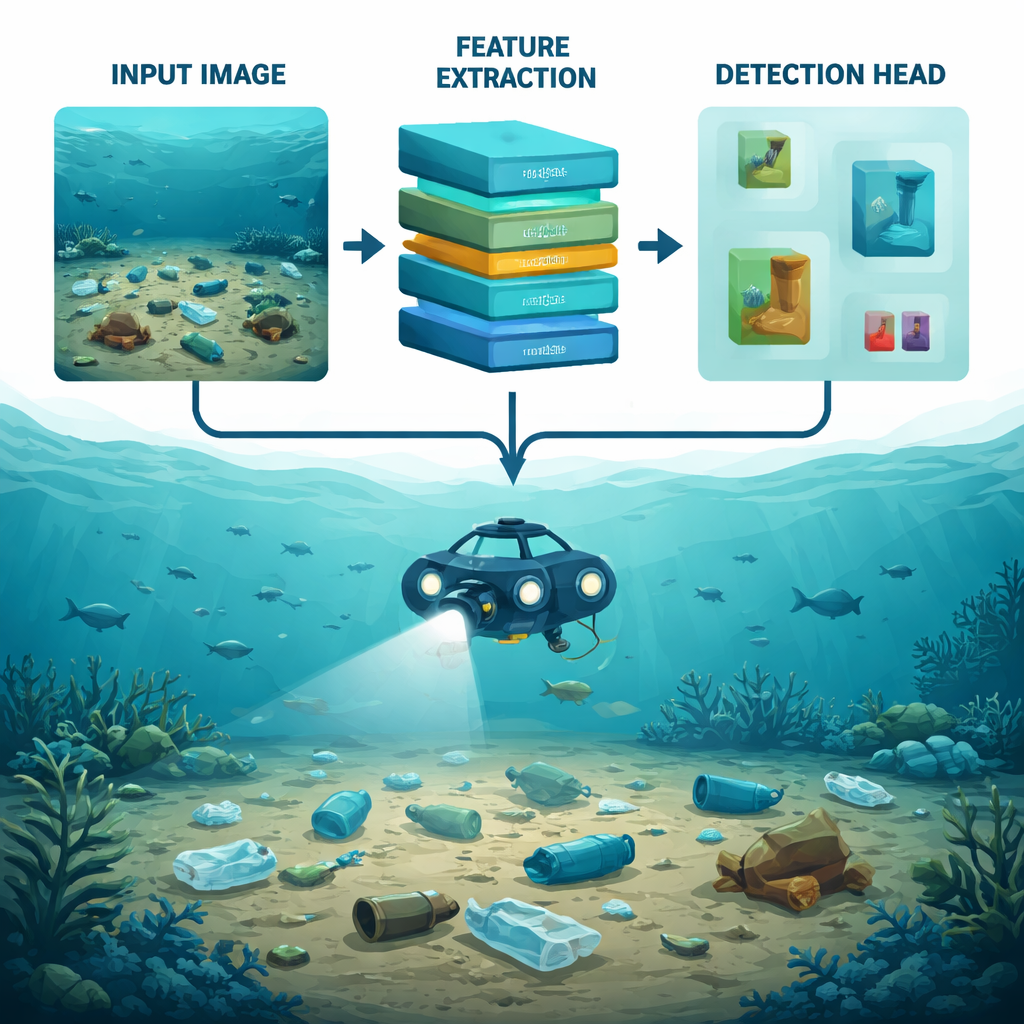
著者らは「You Only Look Once」系列の物体検出器であるYOLOv11を基盤に改良を加えています。YOLOモデルは画像を一度だけ走査して複数の物体の位置と種類をリアルタイムに予測するため人気があります。しかし標準的なYOLOv11の設計は、街路や屋内写真などより典型的なシーン向けに作られており、視覚的に過酷な水中世界には最適化されていません。このギャップを埋めるために、研究者らはネットワークの二つの重要な部分――画像から視覚パターンを最初に抽出する方法と、後段でどの領域が重要なごみオブジェクトでどれがノイズの背景かを判定する方法――を再設計しました。
多様な大きさのディテールを拾う新手法
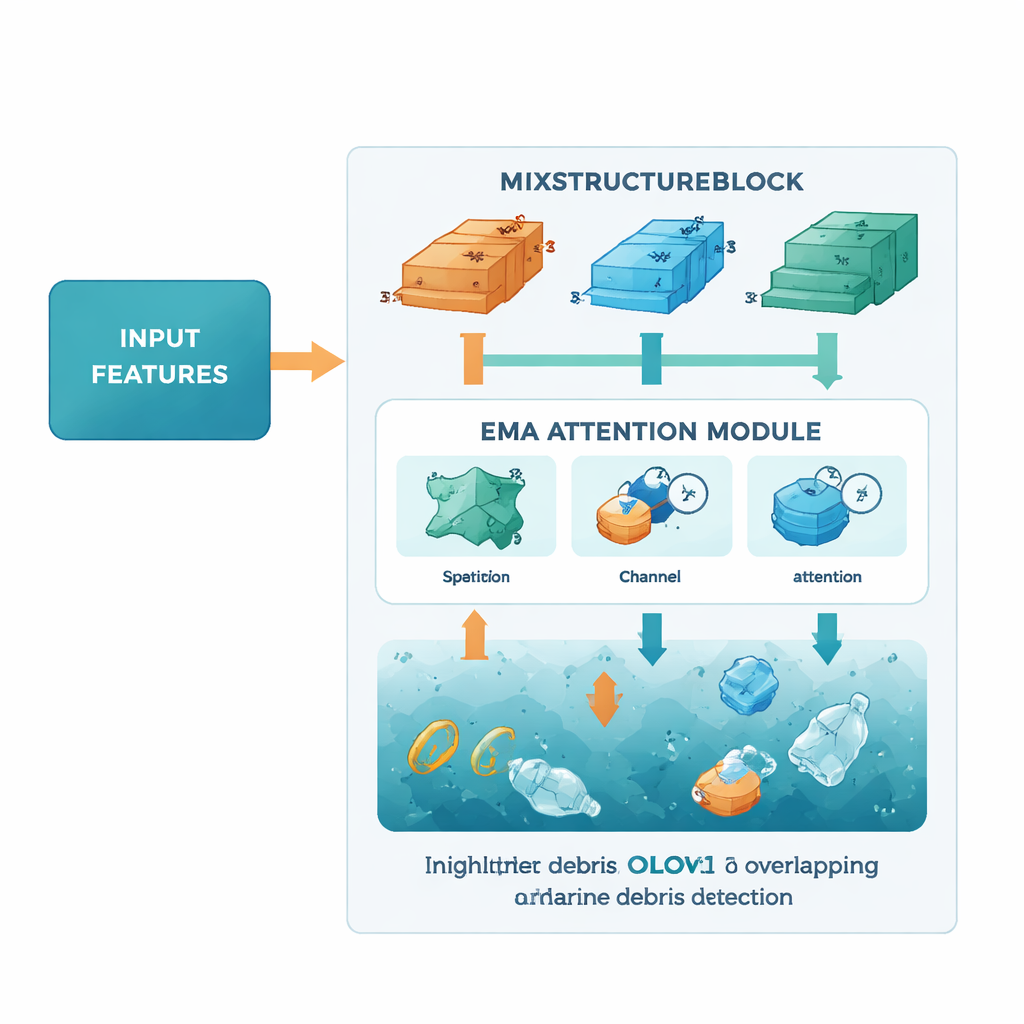
第一の改良はMixStructureBlockと呼ばれるモジュールで、YOLOv11バックボーンの標準的な構成要素を置き換えます。一つの固定的なフィルタパターンを使う代わりに、MixStructureBlockは複数の分岐を並列で動作させ、異なる「ウィンドウサイズ」や間隔でシーンを観察します。これにより、ボトルのキャップの縁のような細かなディテールから、漂う袋のような大きな形状までを検出しやすくなります。加えて、このブロックにはシンプルな注意機構が組み込まれており、有益な色や位置を強調し、役に立たない背景パッチを抑えることを学習します。結果として、小さく薄いごみ片を見つけやすくする、より豊かで雑音の少ない特徴表現が得られます。
ネットワークに注目すべき場所を教える
第二の改良は、検出が行われるネットワーク後半に追加されたEfficient Multi-scale Attention(EMA)モジュールです。EMAは特徴マップを空間方向とチャネル方向の両方で観察し、同時に二つの問いを投げかけます:「画像のどこで重要な事象が起きているか?」と「今どの種類のパターンが最も関連性が高いか?」。複数スケールで情報をプーリングし、軽量な演算を用いることで、EMAは重なり合う物体やカメラから遠くて暗い対象など、ゴミの可能性が高い領域への注目を鋭くします。一方でモデル全体はコンパクトかつ高速で、組み込みハードウェアでのリアルタイム運用に適したままです。
システムの評価
設計を評価するために、研究チームは日本で整備された大規模な深海画像コレクション「TrashCan」でモデルを学習・検証しました。データセットの一つのバージョンはごみをカップ、袋、金属パイプなどの具体的な物体種別でラベル付けしており、別のバージョンはプラスチックや布など素材別にグループ化しています。どちらのバージョンでも、改良されたネットワークは元のYOLOv11や従来の海洋ごみ検出システム、その他の水中特化型YOLO変種など複数の強力なベースラインを上回りました。特に小さく混雑した物体を正しく検出する性能が向上しているだけでなく、モデルサイズが約5メガバイトと極めて小さく、動力の限られた水中機体に適している点も特筆されます。
よりきれいな海への意義
要するに、この研究はAIが水中画像を「見る」方法を慎重に再設計することで、波の下にあるごみの発見に実用的な差が生まれることを示しています。マルチスケールのパターン抽出と重要領域への賢い注意機構を組み合わせることで、提案システムはより多くのごみを効率的に見つけられるようになります。カメラシステムや水中ロボットに導入されれば、こうした技術は科学者や環境機関が汚染のホットスポットをマッピングし、清掃活動を案内し、海洋ごみ削減の政策が効果を上げているかを監視するのに役立ち、より健全な海洋に近づける一歩となるでしょう。
引用: Yuanwei, J., Yijiang, D., Xuemei, W. et al. An improved YOLOv11 network for marine debris detection in underwater environment. Sci Rep 16, 7074 (2026). https://doi.org/10.1038/s41598-026-38305-0
キーワード: 海洋ごみ検出, 水中ロボティクス, 物体検出, 深層学習, 海洋汚染