Clear Sky Science · ja
UncerTrans: 早期行動予測のための不確実性に配慮した時間的トランスフォーマー
行動を早く見抜くことが安全につながる理由
腕の最初のひと振りだけで、その人がやかんからマグカップに安全にお湯を注ごうとしているのか、あるいはやかんを誤って倒してしまいそうなのかを判別できる家庭用ロボットを想像してみてください。工場や病院、スマートホームなどで機械が人と空間を共有する場面が増えると、事故が起きてから反応するのでは遅すぎます。本稿はUncerTransを紹介します。これは、行動のごく初期の兆候だけから人が何をする可能性が高いかを予測するだけでなく、その予測にどれほど確信があるかも示す新しいAIシステムであり、人の安全がかかる場面では極めて重要な能力です。
観察から行動の予測へ
現在の多くのコンピュータビジョンシステムは、行動がほぼ終わってからでなければ何をしているかを認識しません:映像全体を「野菜を切っている」や「コップを拾っている」と分類するのです。それは後の解析には有益ですが、やけどや衝突、転倒を防ぐには不十分です。早期行動予測はより難しい問題に取り組みます:行動のわずか10~20%しか見えない状態で、その後にどのような完全な行動が来るかを判断することです。課題は、多くの行動が初期段階では似て見える点にあります—やかんに手を伸ばす動作は、飲み物を注ぐことを示すかもしれませんし、やかんをぶつけてしまうことを示すかもしれません—したがってシステムは限られた情報で動作し、危険な誤判断を避けねばなりません。
機械に適切な瞬間に注目させる仕組み
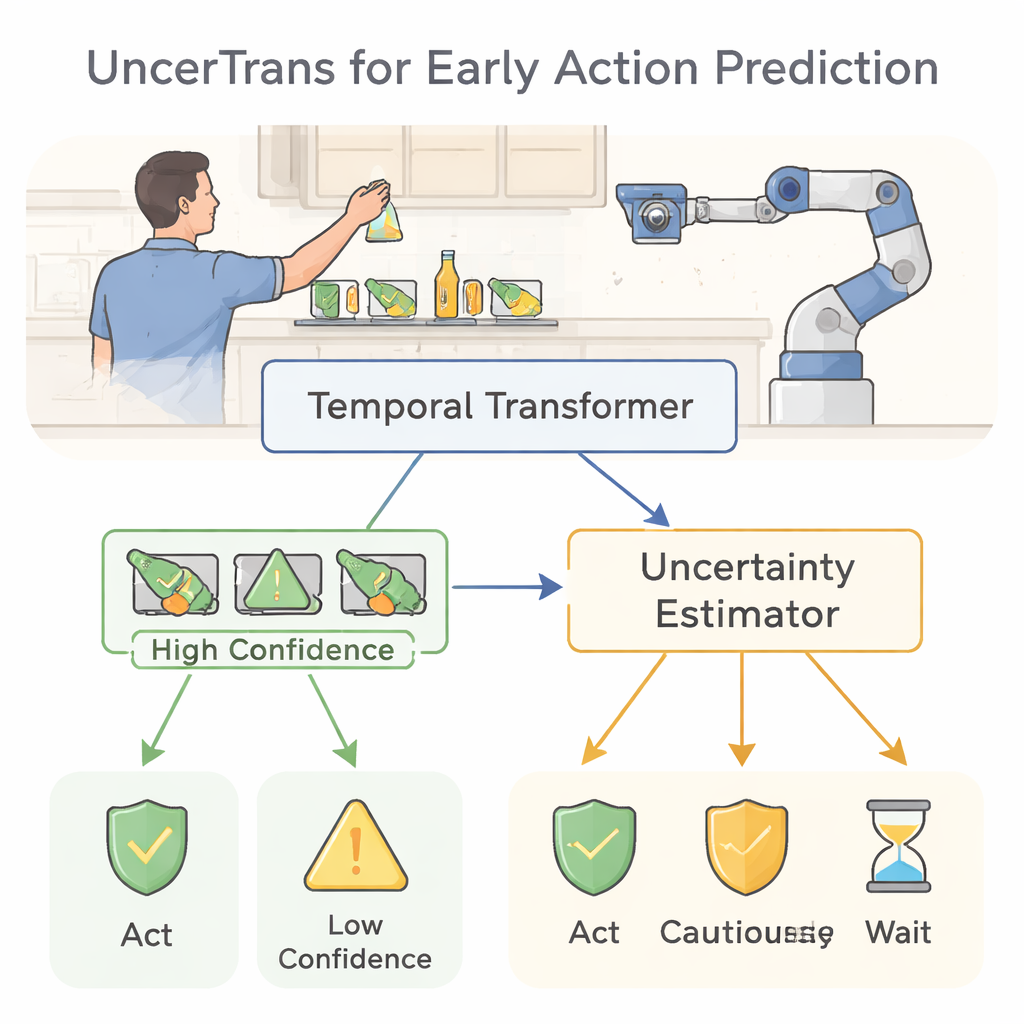
UncerTransは、時間的トランスフォーマーという、もともとは言語処理用に開発された現代的なニューラルネットワークアーキテクチャを使うことでこの問題に対処します。文の単語を読む代わりに、時系列の短い映像断片を扱います。モデルは早期の行動シーケンスをいくつかのセグメントに分割し、注意機構(アテンション)を使ってどの瞬間が重要かを判断します。最近のフレームに追加の重みを与えることで、最新の動きが通常最も明確な意図を示すという直感を反映しています。この設計により、指の動きのような細かな情報と、腕の軌道のようなより広いパターンの両方を、全行動のごく一部しか見えていない状況でも捉えられます。
機械に自分が不確かだと認めさせる方法
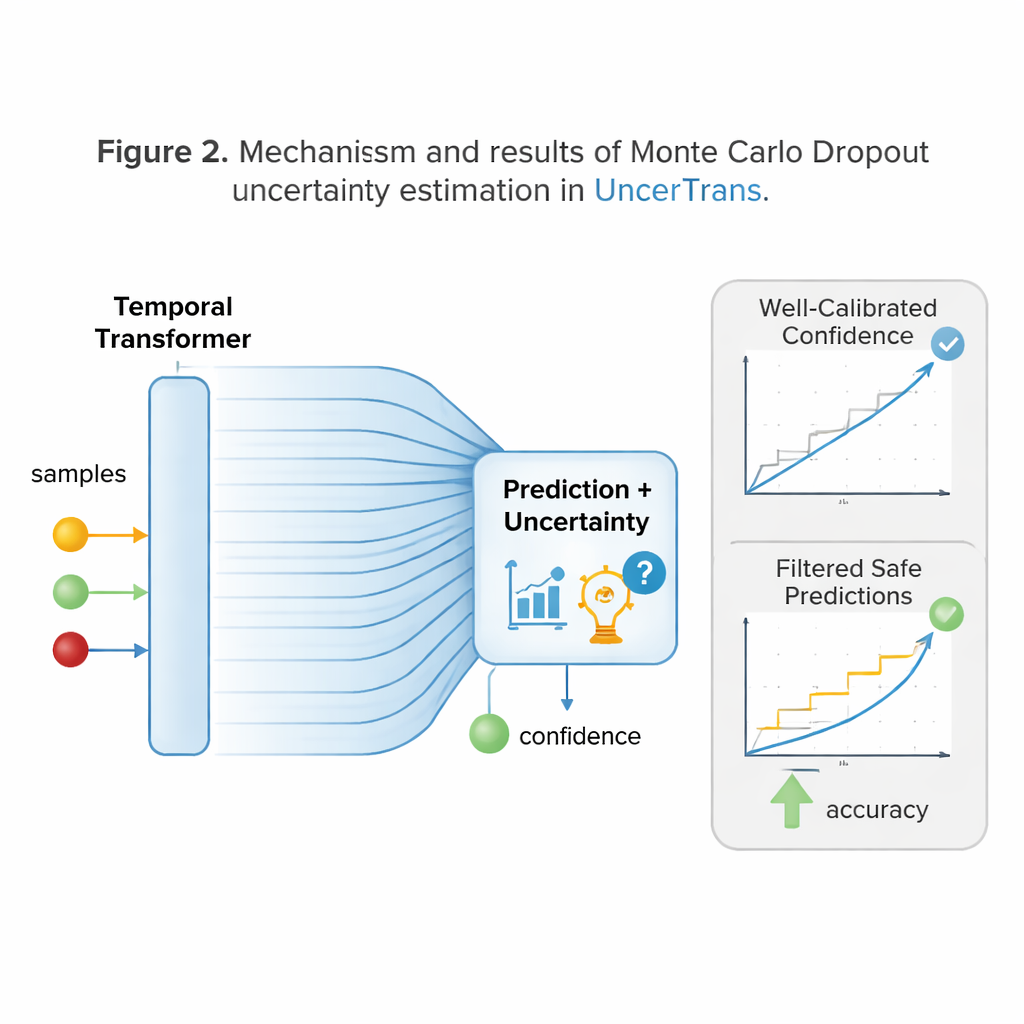
UncerTransの重要な革新は、単一の断定的な答えで終わらない点です。代わりに、モンテカルロドロップアウトと呼ばれる手法を用いて、同じ入力をネットワークに何度もわずかに異なるかたちで通します。各実行では内部の接続をランダムに異なる箇所で切るため、わずかに異なる予測が生じます。これらの予測がどれほど一致または不一致かを観察することで、システムは自らの不確実性を推定できます:予測が密集していれば高い確信を示し、散らばっていれば疑いを示します。UncerTransはさらに、訓練データの不足に起因する不確実性と映像そのもののノイズによる不確実性を区別し、初期のサンプルがあいまいに見える場合には試行回数を増やし、すでに一致している場合には少なくするなど、実行時にテスト回数を調整します。
確信度をより安全な判断につなげる
自分が間違っているかもしれないことを知ることは、それが行動を変える場合にのみ有用です。UncerTransは確信度の推定を実用的な選択に変換します。不確実性が低い予測に対しては、警告を出す、ロボットアームを危険な位置から撤退させるなど、断定的に行動できます。不確実性が中程度の場合は、ロボットの速度を落とす、追加情報を要求するなど、より安全で保守的な振る舞いを選べます。不確実性が非常に高い場合は、判断を保留して観察を続けることも可能です。大規模な“第一人者”視点のキッチン映像データセットでの検証では、UncerTransは特に行動の最初の10%しか見えていない場合において、複数の強力な代替手法よりも将来の行動をより正確に予測しました。注目すべき点は、不確実性の上位30%のケースを破棄すると、残りの予測の精度が約84%に上昇し、不確実性に基づくフィルタリングの実際的価値を示したことです。
日常の人間とロボットのチームワークに与える意味
専門外の人にとっても、メッセージは明快です:UncerTransは、限られた手がかりから次の動作を推測するだけでなく、その推測が信頼できるかどうかを自覚する機械への一歩です。時間感度のある視覚モデルと内部の“確信度メーター”を組み合わせることで、このシステムは台所、工場、介護施設のような散乱した実世界の環境でより速く安全に反応できます。計算コストがかかる点やさらなる改良が必要な点は残りますが、危険を早期に予測し、不確かなら慎重に対応し、人のいる空間により安全に溶け込む将来のロボットや監視システムの有望な設計図を提供します。
引用: Zhai, X., Liu, Y. UncerTrans: uncertainty-aware temporal transformer for early action prediction. Sci Rep 16, 7068 (2026). https://doi.org/10.1038/s41598-026-38107-4
キーワード: 早期行動予測, 人間とロボットの協働, AIにおける不確実性, トランスフォーマー視覚モデル, 安全な知的システム