Clear Sky Science · ja
乱雑な物流における小包仕分けの位置決め手法に関する研究
なぜより賢い小包仕分けが重要なのか
あなたがオンラインで注文をするたびに、大規模な物流センターでは箱たちの見えないバレエが始まります。小包があなたの玄関へ向かう前に、まず見つけられ、拾われ、計測され、スキャンされ、仕分けられなければなりません――しばしば混ざり合ったパッケージの山からです。今日でも、その最初の「混乱の解消」は多くが繰り返しで疲れる作業を行う人手に頼っています。本論文は、ジャングルのように積まれた荷物の中からロボットが確実に掴むべき位置を見つけるのを助ける、ビジョンベースの新しい手法を示します。これにより、完全自動化に近づき、より速く、労力の少ない小包仕分けが可能になります。
乱れた山からロボットに優しいデータへ
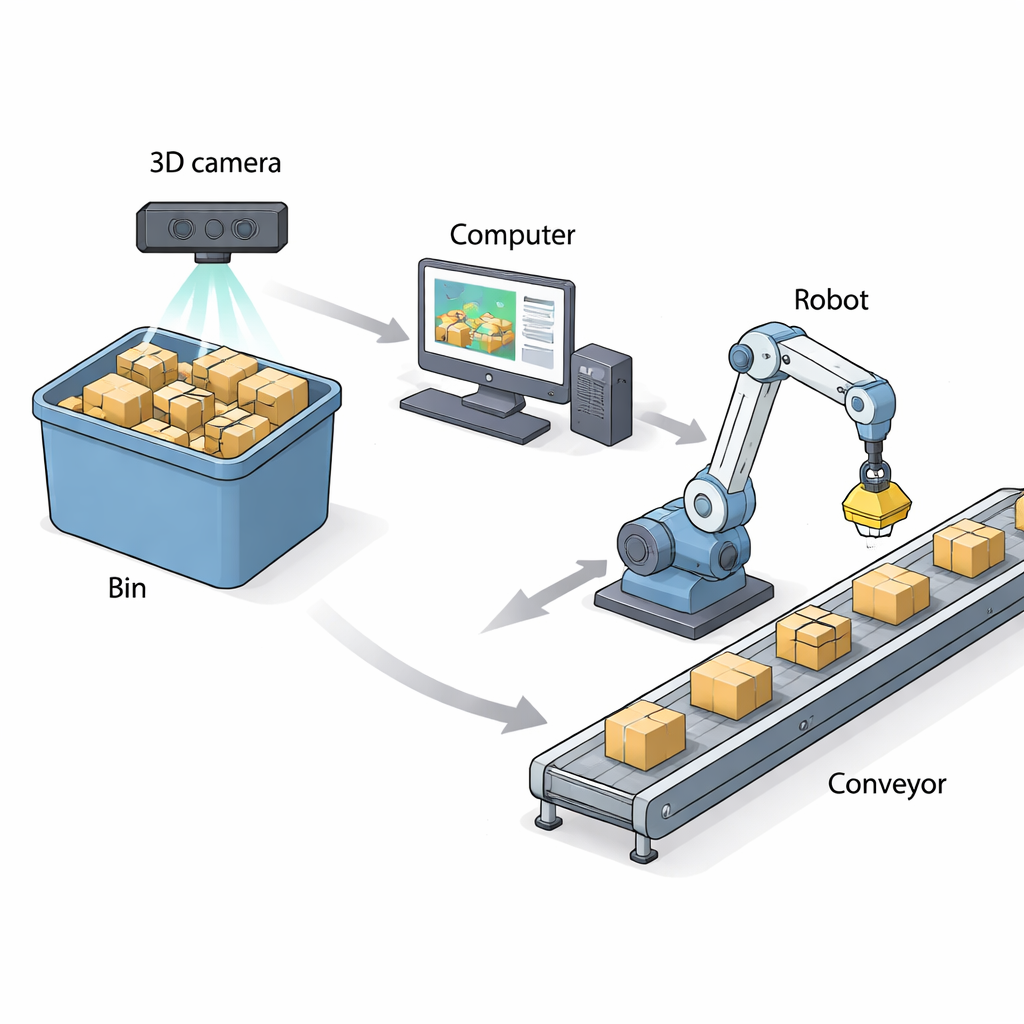
研究者たちは「乱雑な」物流小包、つまり特に順序なしに箱やソフトメーラーが容器に投げ込まれ、重ねられて押しつぶされたり曲がったりする日常的な荷物に注目します。このような乱れた環境で人作業を置き換えるには、ロボットがまずターゲット荷物の表面をどこでどう掴むかを正確に知る必要があります。チームは、上層の小包の色情報と深度マップの両方を取得する3Dカメラを中心にシステムを構築しました。YOLOv8に基づく最新の検出ネットワークがカラー画像上で個々の小包を認識し、深度マップがそれらの三次元形状を明らかにします。この組み合わせにより、コンピュータは遮蔽が少なく、ビンの端から適度に離れているなど次に掴むべき最良の小包を選び出し、正確な把持点を算出できます。
三点と影で安定した把持点を見つける
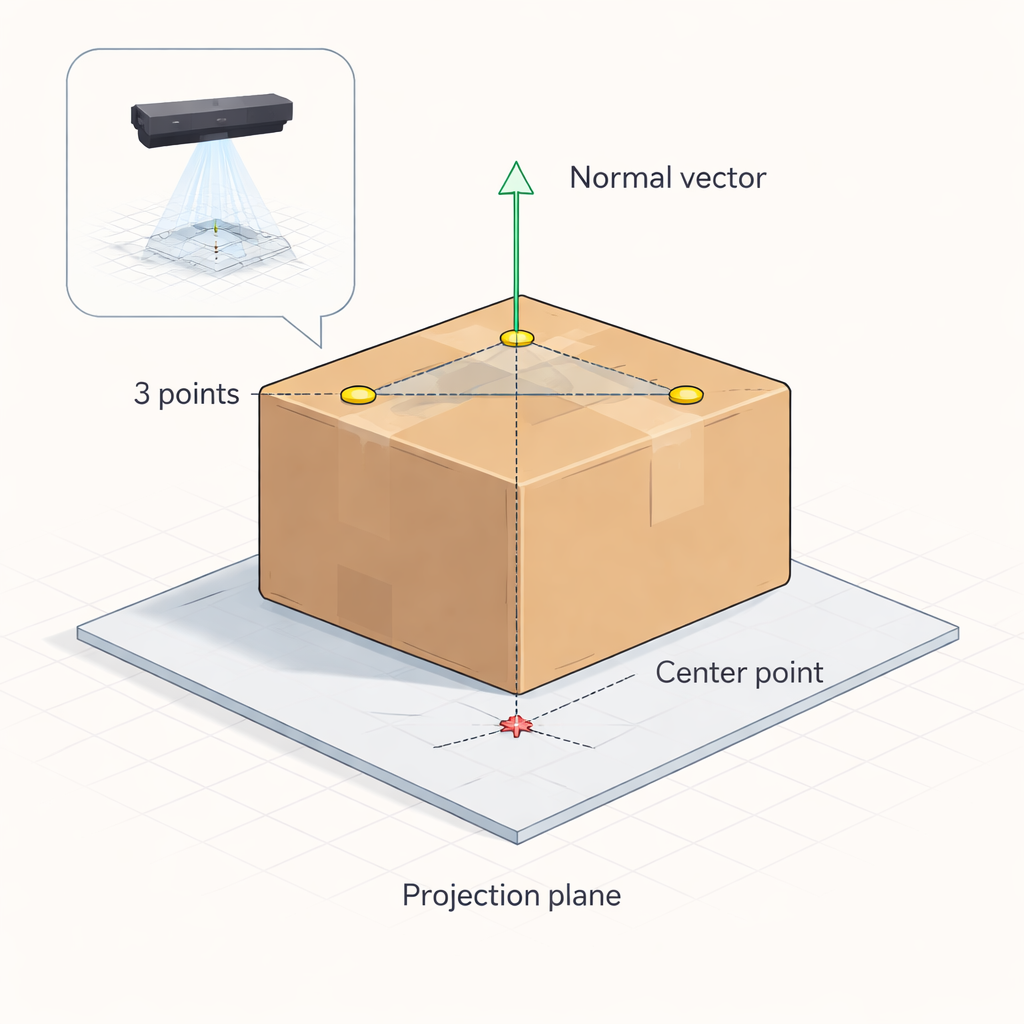
手法の核心は、著者たちが三点による向き・投影中心化アルゴリズムと呼ぶ幾何学的トリックです。ターゲット小包が選ばれると、システムは深度データからその上面上の点をランダムに三点選びます。これら三点は平面を定義します—テーブルトップに刺した三本のピンがその傾きを定めるのと同様です。そこからアルゴリズムはその平面の法線方向、すなわち面に垂直に突き出す直線を計算します。同時にシステムは画像上の四つの上辺コーナーを使って投影された輪郭の幾何学的中心を推定します。これは長方形の影の中心を見つけるような操作に似ています。平面の向きとこの中心位置を組み合わせることで、正確な3D把持位置と上面の傾きを得られ、吸着カップやグリッパーの指示に用いることができます。
潰れたり膨らんだ荷物への対処
実際の小包は完璧な直方体ではありません:プチプチ包装の封筒は垂れ、柔らかい袋は膨らみ、段ボール箱は荷重で歪むことがあります。単純に平坦な面を仮定するだけではこれらの場合に失敗します。これに対処するため著者たちは数学を拡張し、ほぼ平坦なパッケージ、凸(膨らみ)、凹(たわみ)の三つの状況を区別します。小包表面の最大深度値と最小深度値を比較することで、まず大きく変形しているかを判定します。変形がある場合、想定する基準平面と変形面との交差がどのようになるかを解析し、その交線におおよその楕円をフィットさせます。そこから、実際の上面がたわんだり膨らんだりしていても安定した把持面を最もよく表す「最適」平面を求め、それにキーとなる把持点を投影し直します。
アルゴリズムの実地試験
理論が実際に機能するかを確認するため、チームは6軸産業用ロボット、3Dカメラ、カスタムのレーザー&プローブ装置を備えた試験台を構築しました。まず各試験小包の上面の真の幾何学的中心に印を付け、二本のレーザービームでその物理位置を空間上に特定しました。次に視覚アルゴリズムに同じ中心の推定を行わせ、ロボットに二本目のプローブをその算出点へ移動させました。二つのプローブ先端の微小なずれを測定することで位置決め誤差を算出できます。剛性のある木製箱モデルと現実的な包装材(段ボール箱、プチプチ封筒、プラスチック袋、最大250×250 mmのサイズ)を用いた試験では、最大位置決め誤差は約1.7ミリメートル、軸ごとの平均誤差はおよそ1ミリメートル前後でした。各小包の全計算は概ね17.5ミリ秒で完了し、高スループットの仕分けラインでも十分な高速性を示しました。
将来の倉庫にとっての意味
平たく言えば、本研究は3Dカメラとこの三点・投影ベースのアルゴリズムを備えたロボットが、乱雑なビンからミリメートル精度で物を掴む場所と方法を確実に導き出せることを示しています。非常に柔らかいパッケージで変形が大きい場合には精度が若干落ちますが、現実的な倉庫環境では十分に堅牢です。小包量が増え続け、人手不足が続く中で、このようなアルゴリズムは最も重く反復的な仕分け作業を人から機械へ移すことで、より安全で単調でない仕事環境を実現しつつ、拡大する電子商取引の流れを円滑に保つ助けとなるでしょう。
引用: Han, Y., Zhang, F., He, A. et al. Research on positioning method in parcel sorting in disordered logistics. Sci Rep 16, 7524 (2026). https://doi.org/10.1038/s41598-026-38092-8
キーワード: 3Dビジョン, 小包仕分け, ロボットピッキング, 物流の自動化, 物体の位置特定