Clear Sky Science · ja
簡略化したSwin-Tと改良EFS-Netを統合した注意誘導型の複雑海中環境における海底パイプライン分割
海底の観察が重要な理由
波の下に隠れた広大な配管網は、現代社会が依存する石油、ガス、電力ケーブルを運んでいます。これらの海底パイプラインが亀裂、腐食、または移動すると、稼働停止や深刻な汚染といった高コストな問題を引き起こします。現在、多くの検査作業は水中ロボットの不鮮明な映像を何時間も監視する人間のオペレーターによって行われています。本論文は、暗い、浮遊粒子で“海雪”のようにざらつく、あるいは砂に部分的に埋まっているような困難な水中画像からパイプラインを自動的に抽出できる新しい人工知能(AI)システムを提示します。信頼性の高い自動検査に向けたこの一歩は、オフショアのエネルギーやインフラの保守をより安全かつ低コストにする可能性があります。
濁った世界で鮮明に見る
水中画像はコンピュータにとって非常に解釈が難しいことで知られています。光は深度とともに急速に減衰し、色は緑や青に偏り、浮遊粒子が霞や雪のような斑点を作ります。鋭いエッジやクリーンなコントラストに依存する従来の画像処理手法は、パイプが砂で覆われていたり植物に隠れていたり霧でぼやけている場合に失敗しがちです。深層学習は状況を改善し、いくつかの一般的なニューラルネットワークは既に特定のデータセットでパイプを検出できます。しかし、これらのシステムは通常、ある種の水質やカメラ設定に特化しています。異なる水域、照明、背景に直面すると精度は大きく低下します。中心的な課題は、高い精度と適応性を両立しつつ、現場の検査システムで動作可能な効率性を保つモデルを構築することです。
水中画像への二つの“脳”アプローチ
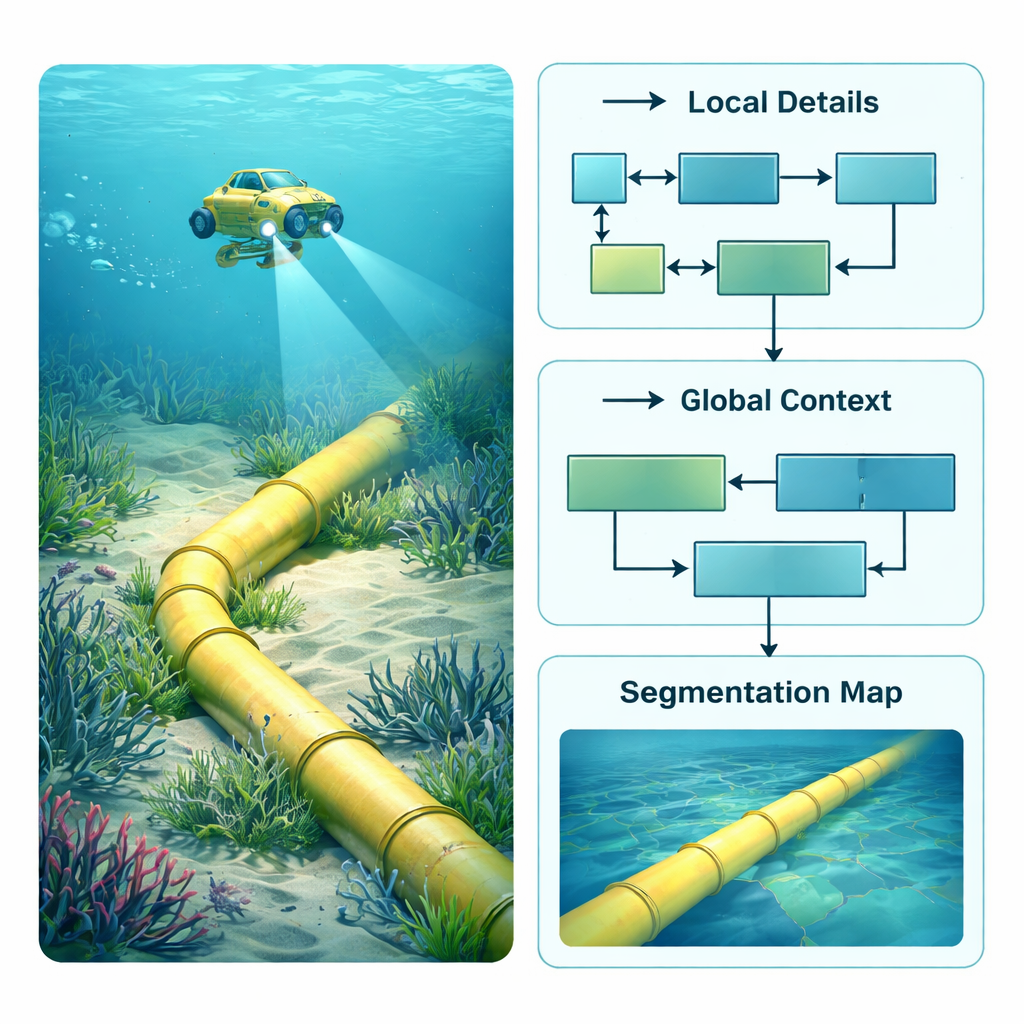
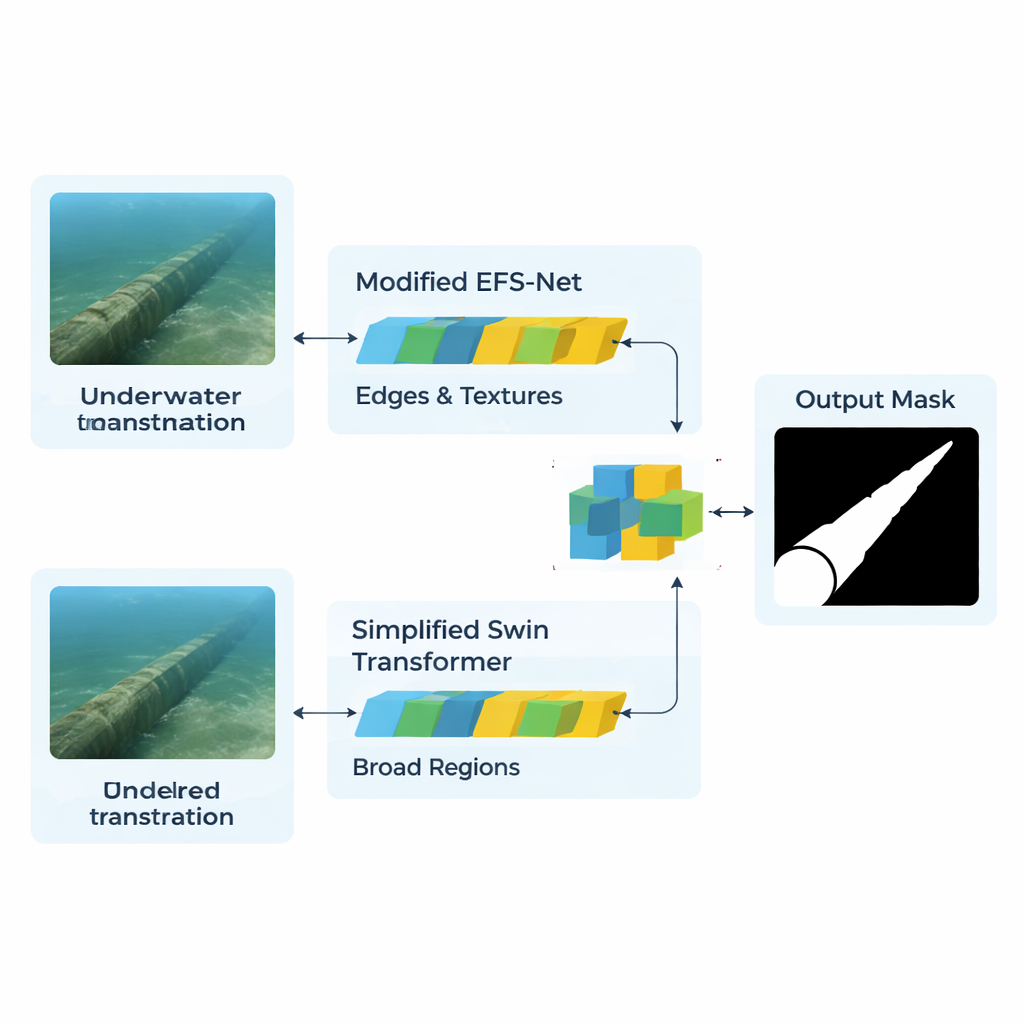
著者らは、二つの非常に異なる“見る方法”を組み合わせたハイブリッドAIアーキテクチャを構築することでこの問題に取り組みます。一方のブランチは、簡略化したSwin Transformerに基づき、広角の観察者のように機能します。フレーム全体をスキャンして、海底に沿ったパイプの大域的な経路など大規模なパターンを理解します。もう一方のブランチは、EFS-Netを改良しEfficientNetのバックボーンを用いたもので、虫眼鏡のように細部に集中します。エッジ、テクスチャ、パイプラインの開始点と砂や植生の境界を示す細い構造などの微細な特徴に着目します。両方のブランチは同じリサイズ済み画像を処理し、各領域でネットワークが意味のありそうな構造だと判断したものを記述する内部の特徴マップに変換します。
注意機構により重要点を選ぶ
これら二つのブランチの出力を単に重ねるだけでは、冗長な情報のもつれが生じます。代わりにモデルは“注意(attention)”機構を用いて、ピクセルごとにどの詳細に注目すべきかを決定します。三頭のクロスアテンションモジュールが、細部に焦点を当てるブランチの特徴と文脈に焦点を当てるブランチの特徴を比較します。本質的には、細部ブランチが「このエッジはパイプの一部か?」といったターゲットとなる問いを投げかけ、文脈ブランチが「この位置と方向の線はパイプの一部として整合性があるか?」という大域的な手がかりを供給します。さらにCBAMと呼ばれる洗練ステップが、パイプライン領域からの信号を強め、岩石、藻類、浮遊粒子などの背景ノイズを抑制します。デコーダーネットワークはその後、各ピクセルがパイプラインか否かを示すフルサイズのマスクを段階的に再構築します。
システムの実地試験
この設計が実際に機能するかを評価するため、研究者たちはHOMOMOと名付けた大規模で厳しいデータセットを組み上げました。これは1.2キロメートルにわたる実際のパイプライン沿いで撮影された12万枚以上のカラー画像を含み、低照度、海霧、浮遊“雪”、砂の流動、繁茂した植物など、変化に富みしばしば過酷な条件を含みます。彼らはコレクションの一部でモデルを訓練し、UNet、DeepLab、SwinUNet、TransUNet、Mask2Former、複数のYOLOオブジェクト検出器など広く使われる手法と比較しました。HOMOMO上で、彼らのハイブリッドモデルはパイプラインピクセルを平均IoUで約98%という高い精度で正しく分割し、競合手法の最良値を大きく上回りました。同様に重要なのは、再学習なしで合成データのRoboflowセットや実世界のYouTube映像という非常に異なる二つの画像ソースでテストした際にも、モデルが強い性能を維持し、新しいカメラや水質に対処できることを示した点です。
現実の海にとっての意義
専門外の読者への要点は、このAIシステムが従来手法では扱いきれないほどノイズやばらつきのあるビデオフレームから信頼性を持って海底パイプラインを描き出せるということです。シーンの大域的な視点とエッジやテクスチャに対する鋭い観察を融合し、注意機構でこれらの観点を統合することで、膨大な計算資源を必要とせず高精度を達成しています。実務的には、こうしたツールが自律ロボットによる長距離の海底インフラ監視を支え、損傷や埋没の疑いを人間のレビューのためにフラグ付けするのに役立つ可能性があります。極めて細いパイプや完全に隠れたパイプにはまだ課題が残りますが、この手法は現代のエネルギーや通信ネットワークを支える見えない配管のより安全で自動化された検査に向けた重要な一歩を示しています。
引用: Hosseini, N., Mohanna, F. & Moghimi, M.K. Integrating simplified Swin-T with modified EFS-Net for attention-guided underwater pipelines segmentation in complex underwater environments. Sci Rep 16, 6987 (2026). https://doi.org/10.1038/s41598-026-38081-x
キーワード: 海底パイプライン, 画像分割, 深層学習, 海洋検査, トランスフォーマーネットワーク