Clear Sky Science · ja
モジュラー式ケーブル懸架並列ロボットの再構成可能な解析と作業空間最適化
目に見えないレールを走るロボット
重いカメラをスタジアムの上で滑らせたり、建設現場で資材を吊り上げたり、リハビリ機器を患者の周りで誘導したりするロボットを想像してみてください。これらは剛性アームの上を走るのではなくケーブルにぶら下がって動きます。本論文は、構造を必要に応じて変形できる新種のケーブル懸架ロボットを紹介します。これにより一台の機械が多様な作業に適応し、作業空間から最も有用な運動を引き出せます。
交換可能な部品でロボットを組み立てる
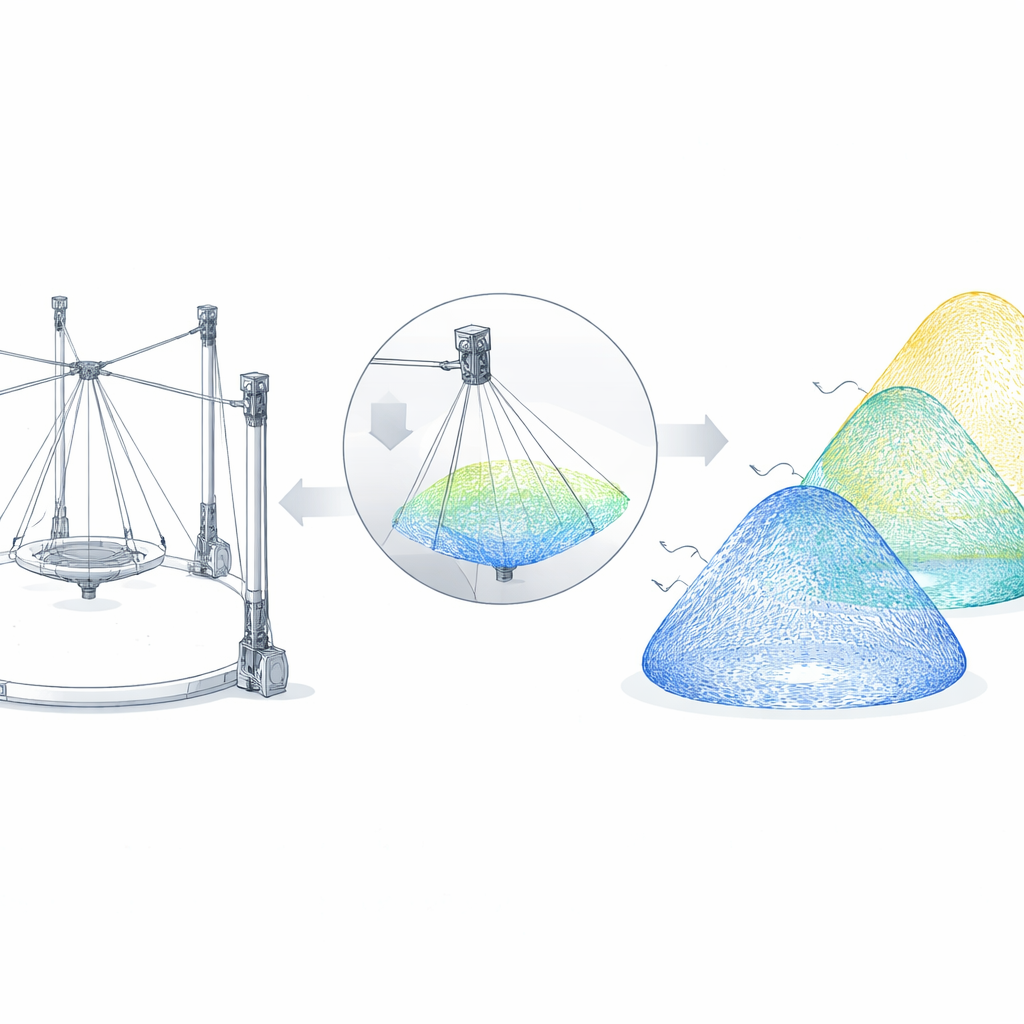
研究の中心はモジュラー式ケーブル懸架並列ロボット(MCSPR)です。固定された金属アームの代わりに、最大六つまでの同一の「ブランチ」を用います。各ブランチはモータやプーリ、中央の可動プラットフォーム(エンドエフェクタ)に接続するケーブルを備えた塔状のユニットです。これらのブランチは円形のガイド上に配置され、追加・撤去・回転・上下移動が可能です。配置を変えることで、同じハードウェアが複数の別々のロボットのように振る舞います。ブランチが二つであれば平面内を動き、三つまたは四つであれば空間内を自由に移動し、五つや六つになるとプラットフォームの多方向の傾斜や回転も実現できます。

形を変える機械の骨格を設計する
このような柔軟なシステムを設計することは、単に部品をボルトで固定する以上の作業です。著者らは体系的な「構造合成(structural synthesis)」の手法を用い、各ケーブル、プーリ、ジョイントをネットワークの基本要素として扱います。グラフに似た図を用いてこれらの要素の接続を写し取り、プラットフォームが三軸方向の滑動やそれらの回転といった望ましい自由度を持つように設計します。このモジュールと接続のカタログは設計ツールキットとして機能し、タスクが要求する運動に応じてブランチの数や円形ガイド上の配置を選べば、結果として得られる構造が意図した挙動を示すことが保証されます。
プラットフォームがどのように動くかを知る
プラットフォームは押すことのできないケーブルで吊られているため、その運動予測は従来のロボットより複雑になります。研究チームはMCSPRの主要な五つの構成に共通して適用できる統一的な数学的記述を作成しました。所望の位置と姿勢が与えられると、各ケーブルの長さとその変化速度を正確に計算します。続いて物理プロトタイプを組み、プラットフォームに空間内の滑らかな螺旋軌跡を描かせました。ケーブルに取り付けたセンサが実際の動きを記録し、予測と良く一致しました。これは、ジオメトリを再構成してもモデルがロボットの制御を確実に導けることを確認するものです。
ロボットが安全に静止できる場所を見つける
同様に重要なのは、吊られたプラットフォームがどこで釣り合っていられるかを理解することです。どれか一つのケーブルが緩めば制御を失います。著者らは静的平衡作業空間と呼ぶ概念に注目しました。これは重力のみが作用している間に全てのケーブルが正の張力を保てる空間領域です。モンテカルロ法を用いて多数のプラットフォーム位置と姿勢をランダムにサンプリングし、各点でその姿勢を保つために必要なケーブル張力が安全範囲内に収まるかを検査します。受理されたサンプルは三次元の点群を形成し、ロボットが使用可能な作業体積の輪郭を描きます。
賢く調整してリーチを伸ばす
MCSPRのブランチは高さや角度を変えられ、プラットフォームは異なる質量や傾斜角の荷重を運べるため、この安全な体積の大きさと形状は固定ではありません。研究者らは六ブランチ構成でこれらの要素を体系的に変化させました。重いペイロードはロボットが静止できる領域を急激に縮小する一方、ブランチの高さや角度間隔を巧みに選べばその領域を拡大できることを示しています。次に最適化問題を定式化し、ペイロード、ブランチの高さ、ブランチの角度、プラットフォームの傾斜範囲を調整して安全な作業空間の体積を最大化します。ソフトウェア上でこの探索を実行した結果、単純な配置に比べて到達可能で釣り合いの取れた空間が数倍に拡大する構成を見出しました。
実世界の作業にとっての意義
専門外の読者にとっての要点は、このロボットがほとんど組み立て式のキットのように形を変えられる一方で、精密に解析・調整できることです。モジュラーなハードウェアと綿密な数学的設計、コンピュータによる探索を組み合わせることで、著者らは単一のケーブル懸架機を多用途なプラットフォームへと変えました。これにより精密製造からリハビリテーションまで多様な作業に適応し、作業空間を最大限活用しつつ荷重を安全に支持できます。
引用: Zhao, T., Dai, W., Zheng, F. et al. Reconfigurable analysis and workspace optimization of modular cable-suspended parallel robot. Sci Rep 16, 9210 (2026). https://doi.org/10.1038/s41598-026-37947-4
キーワード: ケーブルロボット, モジュラー・ロボティクス, 再構成可能な機構, ロボット作業空間, 並列マニピュレータ