Clear Sky Science · ja
ビジョントランスフォーマーとエッジコンピューティングに基づく無人航空機向けリアルタイム物体検出
空のより賢い目
無人航空機(ドローン)は、橋の検査、交通監視、行方不明者捜索などの作業で急速に日常的な道具になりつつあります。しかし、こうした時間が重要な任務でドローンが真に役立つためには、単に世界を撮影するだけでなく、限られたバッテリーと小型のオンボードコンピュータ上で飛行しながら小さな物体をリアルタイムに認識できなければなりません。本論文は、ビジョントランスフォーマーという先進的なAI技術と近隣のエッジコンピューティングを巧みに組み合わせることで、歩行者、自転車、車などの小さな物体を空中から迅速かつ確実に検出できるように、ドローンにより鋭く速い“目”を与える新しい方法を提示します。
ドローンが細部を見落としがちな理由
地上から高く離れると、人や車はビデオフレームで数十ピクセルに小さくなり得ます。ドローンで使われる従来のニューラルネットワークは低電力チップ上で高速に動作するよう設計されていますが、こうした小さな物体を見落としたり、照明や視点の変化で失敗しがちです。言語処理の世界から取り入れられたビジョントランスフォーマーのモデルは、シーン全体を同時に理解し、雑多な背景から小さな詳細を浮かび上がらせる点で優れています。問題は、それらが通常非常に大きな計算資源を必要とし、飛行機体が搭載できるものをはるかに超えてしまうことです。著者たちはこのギャップを埋めることを目指しました:トランスフォーマーの鮮明な視覚を保持しつつ、ドローン上でリアルタイムに実行できるほどに小型化し、条件が許すときだけ余分な処理を近隣のエッジサーバにオフロードする方式です。
分担する頭脳:ドローンとエッジの協働
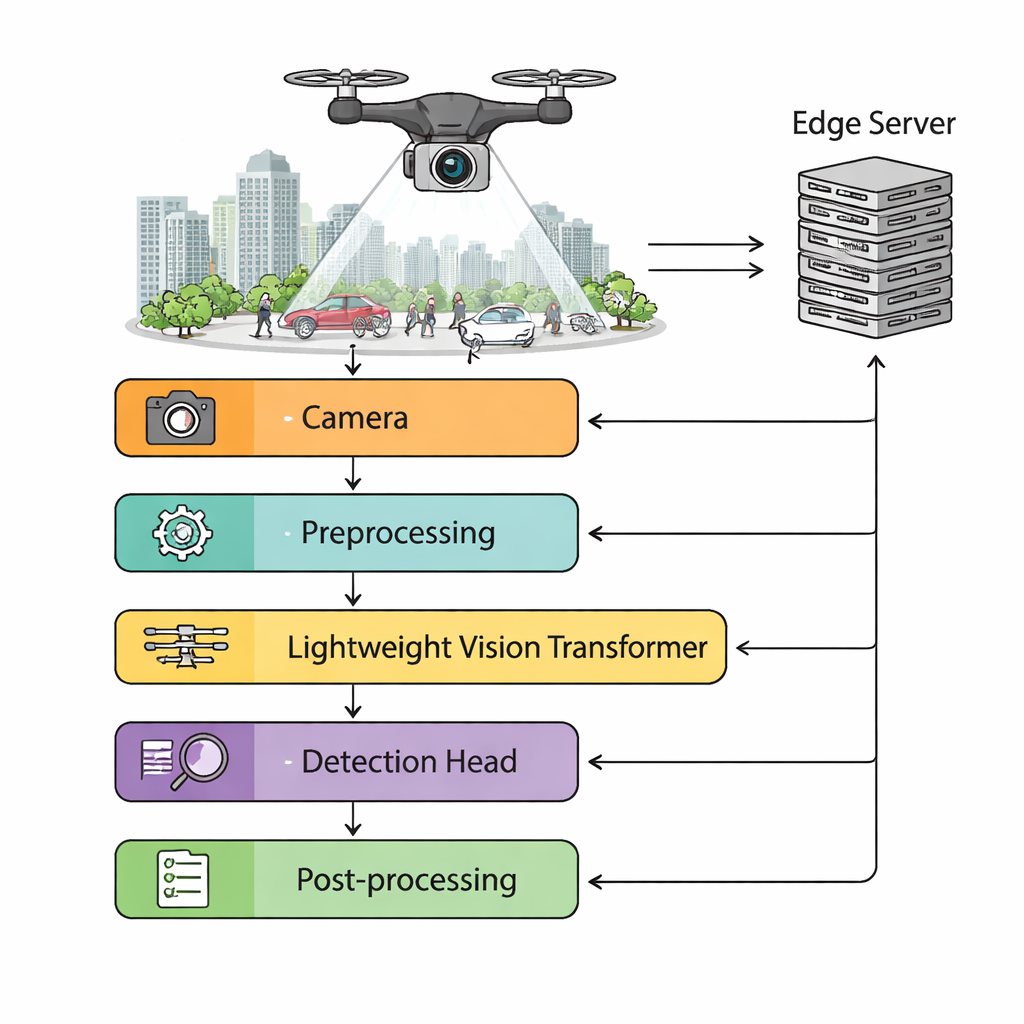
提案されたフレームワークは、ドローンと地上のエッジコンピュータの間で処理を分担します。ドローンのカメラは高精細ビデオをオンボードの前処理モジュールにストリームし、そこで手ぶれ補正、明るさ調整、利用可能な計算資源に応じた動的な画像サイズ変更が行われます。軽量のビジョントランスフォーマーが各フレームから豊富な特徴を抽出し、物体の位置や種類を予測する検出ヘッドに渡します。スケジューラは無線ネットワーク遅延、バッテリー残量、処理負荷を監視します。地上とのリンクが高速で安定しているときは、フレームのバッチ処理や精度向上のための追加モデルの実行といった重いタスクをエッジサーバへ移行できます。接続が悪化した場合は、システムは自動的に完全オンボード処理へ切り替わり、ドローンが“暗闇の中を飛ぶ”ことがないようにします。
視力を失わずにモデルを削減する
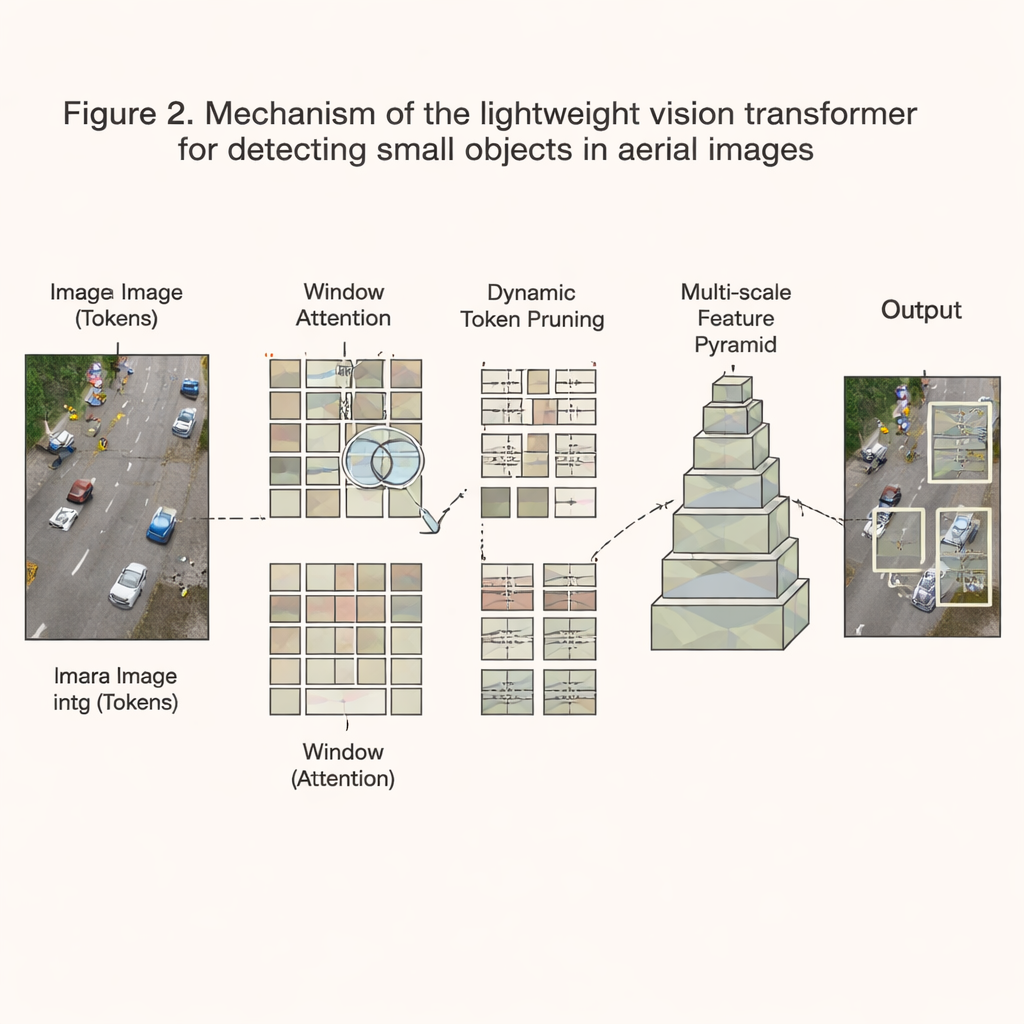
トランスフォーマーを小型で高速にするために、著者らは内部構造を再設計しました。画像の各部分が互いにすべて比較し合う従来の注意機構は解像度とともに爆発的に計算量が増えますが、代わりに局所ウィンドウに注意を制限して画像をスライドさせる方式を採り、計算コストを管理可能なレベルに抑えます。さらに、どの領域が有用な情報を含むか、どれがほとんど空の背景かを動的に評価するプルーニング(剪定)を導入しています。情報量が少ないトークンは早期に削除され、時間とメモリを節約する一方、複雑で雑多なシーンではより多くの詳細を保持します。モデルはまたマルチスケールの特徴ピラミッドを構築し、小さな歩行者とより大きな車両を同一フレーム内で検出できるようにします。これに加え、量子化(数値あたりのビット数を削減)、チャネルプルーニング、低レベルのソフトウェア最適化を行うことで、必要な計算量を約3分の1に削減しつつ、元の精度の94%以上を維持しています。
システムの実地評価
チームは公開ドローンベンチマークと都市・郊外・農村部の異なる季節・照明条件で新たに収集した数千枚の画像から組み上げた大規模な航空データセットで設計を評価しました。ドローンでよく使われる組み込みコンピュータ、NVIDIA Jetson Xavier NX上で彼らのシステムは約39フレーム毎秒で動作し(リアルタイム運用に十分な速度)、YOLO系の広く用いられる軽量検出器より高い精度を達成しました。特に小さい物体の検出においては、従来の畳み込みネットワークに比べて平均適合率で約7ポイントの向上が見られます。市販のドローンプラットフォームでの1週間にわたるフィールド試験では、カメラの振動、照明変化、無線接続の変動にもかかわらず性能が維持され、実際の飛行中にエッジ支援と完全オンボードのモードを滑らかに切り替えられることが示されました。
実世界のドローン任務への意義
平たく言えば、この研究はデータセンター級のコンピュータをドローンに搭載せずとも、ドローンにより鋭く信頼できる視覚を与えられることを示しています。ビジョントランスフォーマーをスリム化し、各画像の最も有益な部分に選択的に焦点を当て、可能な場合には近隣のエッジサーバと協働させることで、著者らはより多くを見て、見落としを減らし、厳しい電力とメモリの制約内でリアルタイムに動作する検出器を実現しました。これにより、捜索救助、災害評価、インフラ検査といった任務がより安全で効果的になり、孤立した人や損傷したケーブルのような小さく重要な詳細を、秒を争う場面で正確に見つけられるようになります。
引用: Zhu, W., Chen, K. Real-time object detection for unmanned aerial vehicles based on vision transformer and edge computing. Sci Rep 16, 6814 (2026). https://doi.org/10.1038/s41598-026-37938-5
キーワード: ドローン, 物体検出, エッジコンピューティング, ビジョントランスフォーマー, リアルタイム画像化