Clear Sky Science · ja
VMDで強化したグラフ注意とLSTMによるフェデレーテッド時空間交通予測
なぜ都市交通の予測が重要なのか
渋滞に巻き込まれたことがある人なら、都市の移動がいかに予測困難に感じられるかを知っています。しかし裏では、計画担当者、輸送事業者、ナビゲーションアプリなどが、数分先や数時間先に各通りに何台の自転車やタクシー、車がいるかを計算機に頼って予測しています。本稿は、巧妙な信号の浄化、ネットワークモデル化、都市間での共有学習を組み合わせることで、センシティブな移動データのプライバシーを維持しつつ、そうした予測の精度を高める新しい手法を探ります。
乱雑で機密性のある交通データの課題
都市の交通パターンは極めて不均一です。朝のラッシュ、突発的な嵐、事故、道路工事、大規模イベントなどが、場所や日によって需要を上下させます。従来の予測手法は時間的に比較的規則的な挙動を仮定しがちですが、交通はその前提に当てはまりません。同時に、自転車シェアやタクシーなど多様な組織が詳細な移動データを収集していますが、プライバシー規制、商業競争、セキュリティ上の理由から生データを一元化できないことが多いです。したがって、この乱雑さに対応し、多数のパートナーから学びつつ生データを各所に残せる予測手法が強く求められます。
複雑な信号をより明瞭な要素に分ける
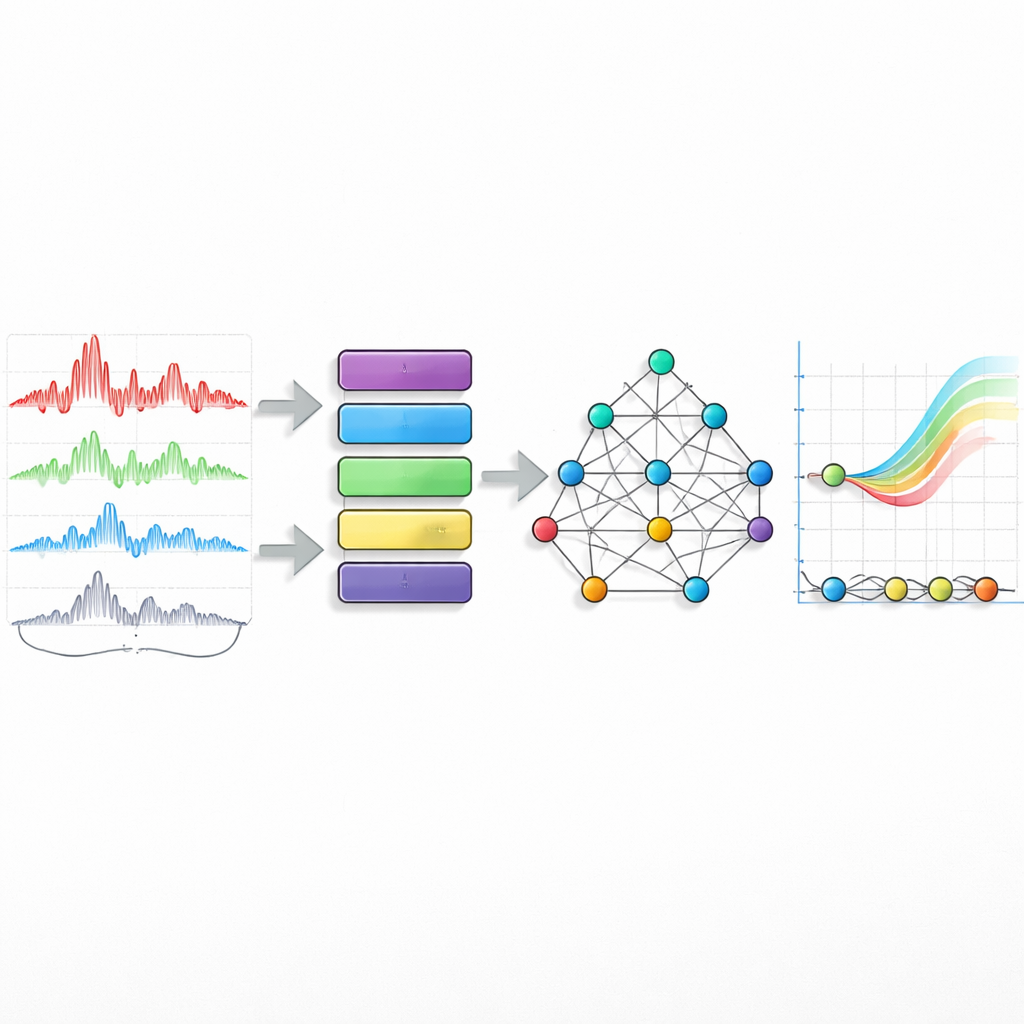
提案システムの最初の要素は変分モード分解(VMD)という信号浄化ステップで、これはノイズの多い交通時系列をいくつかの単純な波と残差に分けるスマートなフィルターと考えられます。ある波は日周期のゆっくりした変動をとらえ、別の波は週次のリズムを、さらに別の成分は速いジッター的な需要の急増を捉えるでしょう。モデルがこれらの成分を個別に見ることで、長期トレンドと短期スパイクの干渉を減らし、パターンの認識を容易にします。この分解は各参加組織の端末上で独立して行われるため、元の移動記録が外部に出ることはありません。
時空間のパターンにモデルを従わせる
信号をより明瞭な成分に分けた後、それらは時間の経過と都市地図上での広がりの両方を追跡するために設計された深層学習のバックボーンに投入されます。長短期記憶(LSTM)モジュールは選択的な記憶の役割を果たし、どの過去の動きが保持に値し、どれがフェードすべきかを判断します。マルチヘッドアテンション層は、ラッシュ前の急上昇や嵐の終わりの急落など、直近の過去の中で最も情報量の多い瞬間にモデルの注意を向けます。同時に、グラフベースのコンポーネントは各ステーションやゾーンをネットワークの点として扱い、固定化された道路地図に頼らずにある領域の変化が他にどのように波及するかを学習します。これらを組み合わせることで、時空間双方の関係性の変化をとらえる柔軟なエンジンが形成されます。
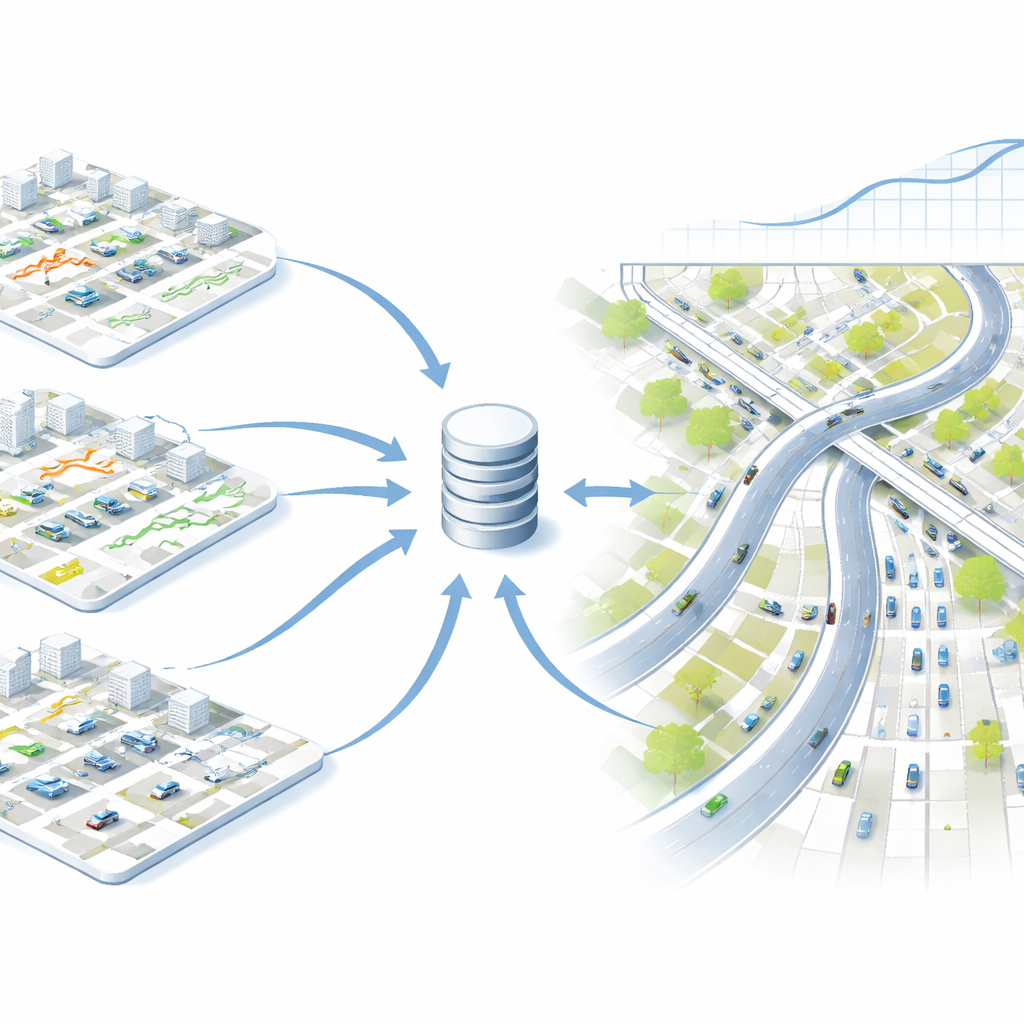
移動履歴を共有せずに都市間で知識を共有する
第2の主要なアイデアは、多数のデータ所有者が生データを中央サーバーに送ることなく共有の予測モデルを学習することを可能にする点です。各クライアント—例えばある地区の自転車シェア事業者や別の地区のタクシーフリート—はモデルをローカルで学習し、更新されたモデルパラメータだけを中央コーディネーターに送ります。サーバーはこれらの更新を混合して新しいグローバルモデルを作り返送します。クライアント側の検証ステップでは、モジュールごとにグローバルな変更がそのクライアント自身のデータにとって有益かどうかを確認します。有益でなければ、その部分についてはローカルのバージョンを保持します。この選択的な採用により、各参加者は共同体の経験から恩恵を受けつつ、自身の固有のパターンに合わせてシステムを調整できます。
実世界の実験が示すこと
この手法の有効性を確かめるため、著者らは2つの大規模な実データセットで評価しました:ニューヨーク市の自転車シェアの乗車データとシカゴのタクシー乗車データで、いずれも時間と場所ごとに時間単位で集計されています。彼らは従来の集中学習とプライバシー保護型フェデレーテッド設定の両方で、幅広い既存の深層学習およびグラフベースのモデルと比較しました。全体として、VMDで強化されたフェデレーテッドモデルは平均予測誤差を大幅に低減し—堅牢なベースラインと比べておおむね25%から40%程度の改善—クライアント間で交通パターンが大きく異なる場合でも安定して収束しました。信号を複数の周波数帯に分解し、各クライアントが共有更新を慎重に受け入れるか決めることが、安定した精度を達成する上で重要であることが示唆されます。
結論:より賢く、よりプライベートな交通予測
日常的な言い方をすれば、本研究は需要曲線を単純な波に分けること、都市ネットワークを通じた動きの時空間的伝播をモデル化すること、多数のデータ所有者が生ログを公開せずに協力できること、という三つの考えを組み合わせることで、交通予測がより鋭敏でプライバシーに配慮したものになり得ることを示しています。提案フレームワークは精度と頑健性の両面で従来手法を一貫して上回り、都市行政、モビリティ事業者、さらには接続車両が、機密性の高い移動データを手元に保ちながら強力な予測ツールを共同で学習できる未来を示唆しています。
引用: Mundada, T., Ramdhave, S., Jain, S. et al. Federated spatial-temporal traffic forecasting with VMD-enhanced graph attention and LSTM. Sci Rep 16, 8852 (2026). https://doi.org/10.1038/s41598-026-37917-w
キーワード: 交通予測, フェデレーテッドラーニング, 都市の移動性, グラフニューラルネットワーク, 時系列