Clear Sky Science · ja
6自由度ロボット腕の動的品質意識経路計画:Bスプライン経路に基づくBiRRTとメタヒューリスティック最適化
滑らかで安全に動くロボット
産業用ロボットは現在、人や工具、コンベヤと混在する狭い作業空間で稼働しています。こうした環境では、アームが単に点Aから点Bへ到達すればよいという訳ではなく、衝突を避け、エネルギー消費を抑え、振動や揺れを生じさせずに移動する必要があります。本論文は、一般的な6関節の産業用アームに対し、計算機が見つけた荒い経路を実機で安全に実行できる滑らかでエネルギー配慮された動作に変換する実用的な手法を示します。
単純な到達の計画が意外に難しい理由
ロボットアームの動作では、多くの要素を同時にバランスさせる必要があります。経路は短く作業を素早く終えるべきで、熱や摩耗を抑えるためにエネルギー消費は控えめであるべきですし、急激な動きや振動を抑えて機構に負担をかけないことも重要です。古典的な手法は少数の手動選択した経路点を通す滑らかな数式曲線(例えばスプライン)を用いますが、これは開けた空間では有効でも、障害物の多いセルでは非効率になったり安全性に問題が出たりします。一方で、Rapidly Exploring Random Trees(RRT)のようなサンプリング手法は複雑な障害物群を抜けるのに強い反面、鋭い屈曲を含む経路を生成しやすく、モータやギアに負担をかけます。著者らはどちらか一方だけでは不十分だと論じ、両者を組み合わせた二段階のフレームワークを提案します。
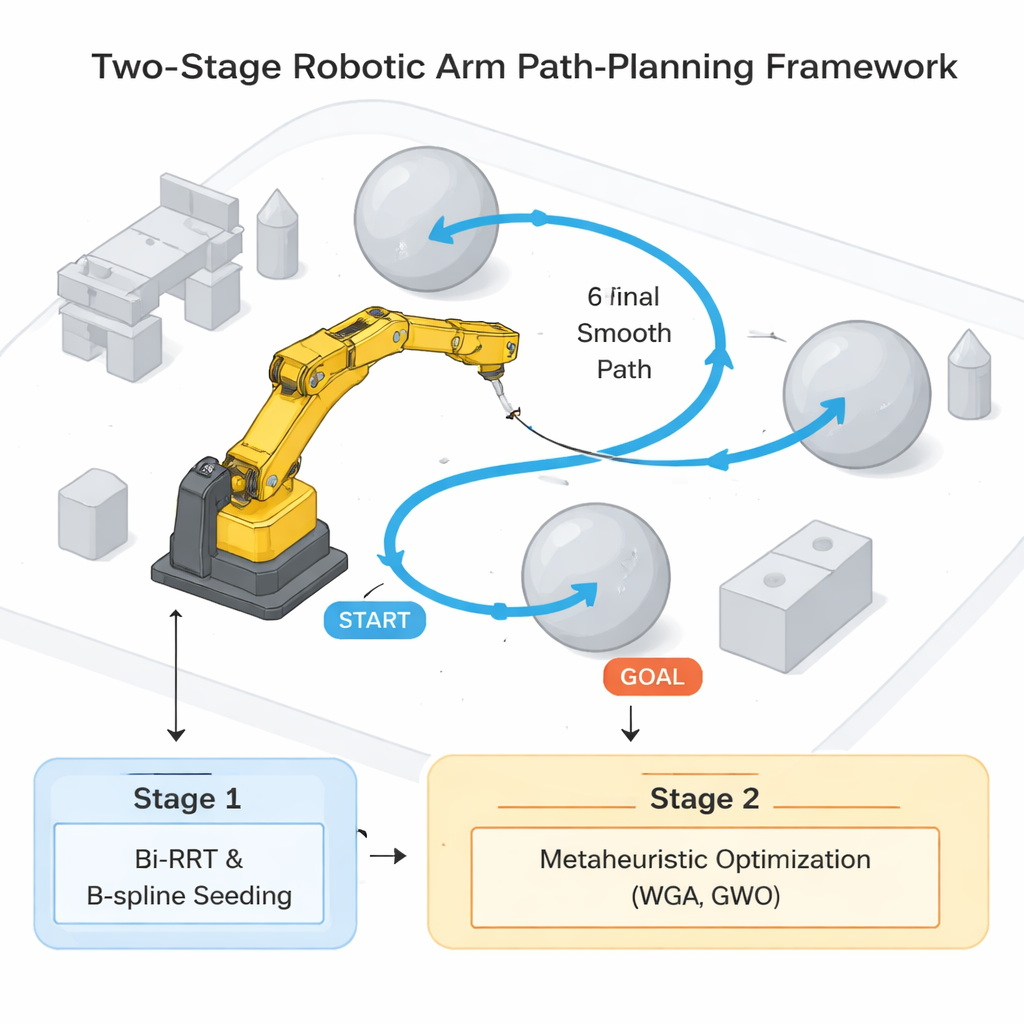
ロボット動作のための二段階ロードマップ
第1段階では、チームはエンドエフェクタの位置ではなくロボットの関節空間で安全な「参照ルート」を構築します。開始点と目標点を結び、球状障害物を安全余裕をもって回避する滑らかなBスプライン曲線から出発します。この曲線が案内役となり、双方向RRT(Bi-RRT)プランナが開始側と目標側の2本のランダムツリーを伸ばして衝突のない経路で合流するまで探索します。探索中はアーム全体の各試行的な動作が単純化した障害物形状と照合されます。経路が見つかると余分な屈曲は「ショートカット」で削られ、結果は時間パラメータ化されたスプラインとして再表現され、理論上ロボットが追従可能になります。
ロボットにより穏やかな動きを教える
第2段階では、この実行可能だが完全ではない経路を品質のために調整します。ここで著者らは自然に着想を得た二つの最適化手法、ハイブリッドなホエール–遺伝的アルゴリズム(WGA)とグレイウルフ最適化(GWO)を用います。両者とも元のスプライン上の限定された制御点群とタイミング操作を扱いますが、これらの点は事前に算出された経路周辺の安全なコリドー内にのみ移動を許されます。各候補動作は単一の総合評価尺度で採点され、その尺度は3つの要素を混合します:エンドエフェクタの移動距離、各モータの特性に基づく関節レベルのエネルギー使用量、そして関節の“ジャーク”(加速度の時間変化率)の大きさです。候補経路を繰り返し提案・評価・改良することで、これらの最適化手法は衝突を避けつつはるかに滑らかで実行に適した動作を探索します。
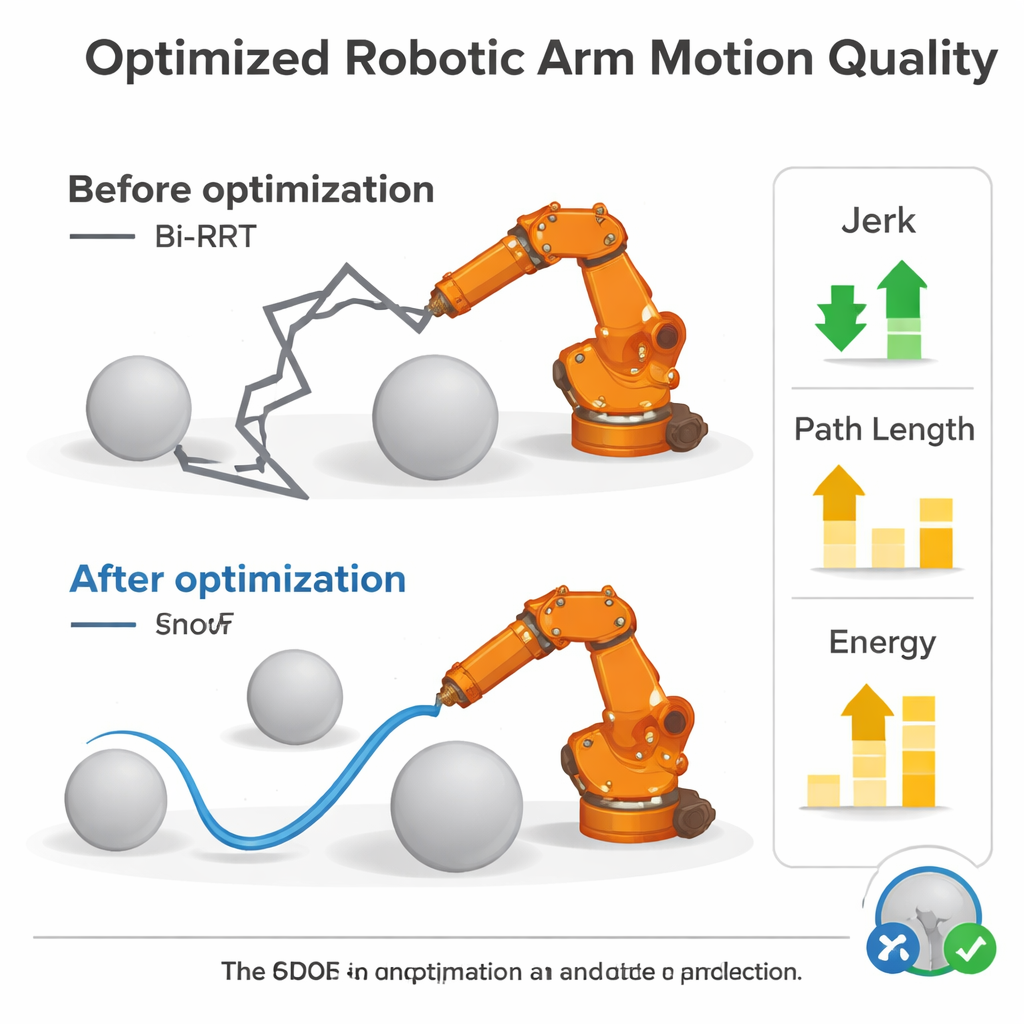
シミュレーションが明らかにしたこと
著者らは広く使われる産業用アームKUKA KR 4 R600のデジタルモデルを用い、三つの障害物を配置した環境で固定の2秒移動を試験しました。純粋なスプラインベースの解は既に比較的滑らかですが、利用可能な安全経路を体系的に活用しているとは言えません。ショートカットを行ったBi-RRTは幾何学的な距離が同程度でエネルギー消費がさらに少ない経路を見つけますが、大きな欠点があります:そのジャーク指標(関節加速度の急変性を示す)はおおよそ10倍高く、実機では振動や応力を誘発しやすいことを示唆します。WGAあるいはGWOを適用すると、このジャークは元のBi-RRT経路に対して約94〜96%削減されます。この顕著な平滑化は移動距離のわずかな増加(約15〜17%)とエネルギーの増加(約2倍程度)を伴いますが、著者らは実機運用の観点から見れば十分に妥当なトレードオフだと主張します。
理論から工場の現場へ
非専門家にとっての主要な示唆は、著者らがロボットの最初の粗い動作案を実機に適した洗練された動作に変える具体的な手順とMATLABベースのツールを提供していることです。本手法はまず複雑な環境で経路が存在することを保証し、次にその経路を再形状化してアームが関節制限やクリアランスを守りつつ衝撃を少なく動くようにします。その結果、実際の産業用ロボットがより安全かつ確実に実行できる一連の動作が得られ、将来的にはカメラや脳信号インターフェースなどを用いて人と共存しリアルタイムに動作を適応させる拡張の基盤を築きます。
引用: Elgohr, A.T., Rashad, M., El-Gendy, E.M. et al. Dynamic quality aware path planning for 6 DoF robotic arms using BiRRT and metaheuristic optimization based on B spline paths. Sci Rep 16, 7487 (2026). https://doi.org/10.1038/s41598-026-37676-8
キーワード: ロボット経路計画, 産業用ロボットアーム, 衝突回避, 動作の滑らかさ, メタヒューリスティック最適化