Clear Sky Science · ja
高齢者の歩行における歩行器補助の適応:時空間および運動学的パラメータの主成分分析
スマート歩行器で歩くことが重要な理由
年齢を重ねると歩行は遅く不安定になりがちで、転倒や骨折、生活自立の喪失といったリスクが高まります。多くの高齢者は移動のために歩行器を使用しますが、こうした器具は動作に微妙な変化をもたらし、必ずしも十分に理解されていない場合があります。本研究は、高度な機能を備えた「スマート歩行器」が健康な高齢者の歩行パターンをどのように変えるかを、詳細な動作計測と高度な統計解析を用いて、加齢由来の変化と器具による変化を分けて明らかにしようとするものです。
加齢と歩行補助具の関係
高齢期の主要な健康問題の一つに転倒があり、65歳以上では約3人に1人が年に少なくとも1回は転倒するとされています。転倒リスクを下げるために臨床現場では歩行器が処方されることが多い一方、従来型の歩行器は扱いにくく、誤った使い方ではかえって不安定さを助長することがあります。そこでセンサーやモーター、制御システムを備えたスマート歩行器の開発が進んでいます。脳卒中やパーキンソン病などの患者に広く導入する前に、まずは健康な高齢者でこれらの機器が歩行にどう影響するかを理解する必要があります。こうした“クリーン”な基準があれば、将来の患者での改善、代償動作、あるいは潜在的に望ましくない新たな動作習慣の出現を見分ける際の基盤となります。
スマート歩行器補助歩行を詳しく見る
研究チームは歩行障害のない60代半ばの高齢ボランティア14名を対象に調査を行いました。被験者は10メートルの単純な歩行を2回行い、1回は何も使わず、もう1回はUFES vWalkerと呼ばれるスマート歩行器を使用しました。このロボット歩行器は力センサー、レーザースキャナ、そしてユーザーの押す力をソフトウェアで変換して最高速度を0.4メートル/秒に抑える車輪駆動を備えています。歩行中は骨盤、大腿、脛、足に小型センサーを配置したウェアラブル動作計測スーツで、歩行速度、歩幅、1歩の時間、両足が地面にある時間(接地時間)や股関節、膝関節、足首関節の歩行周期における動きが記録されました。
歩行器使用時に何が変わったか
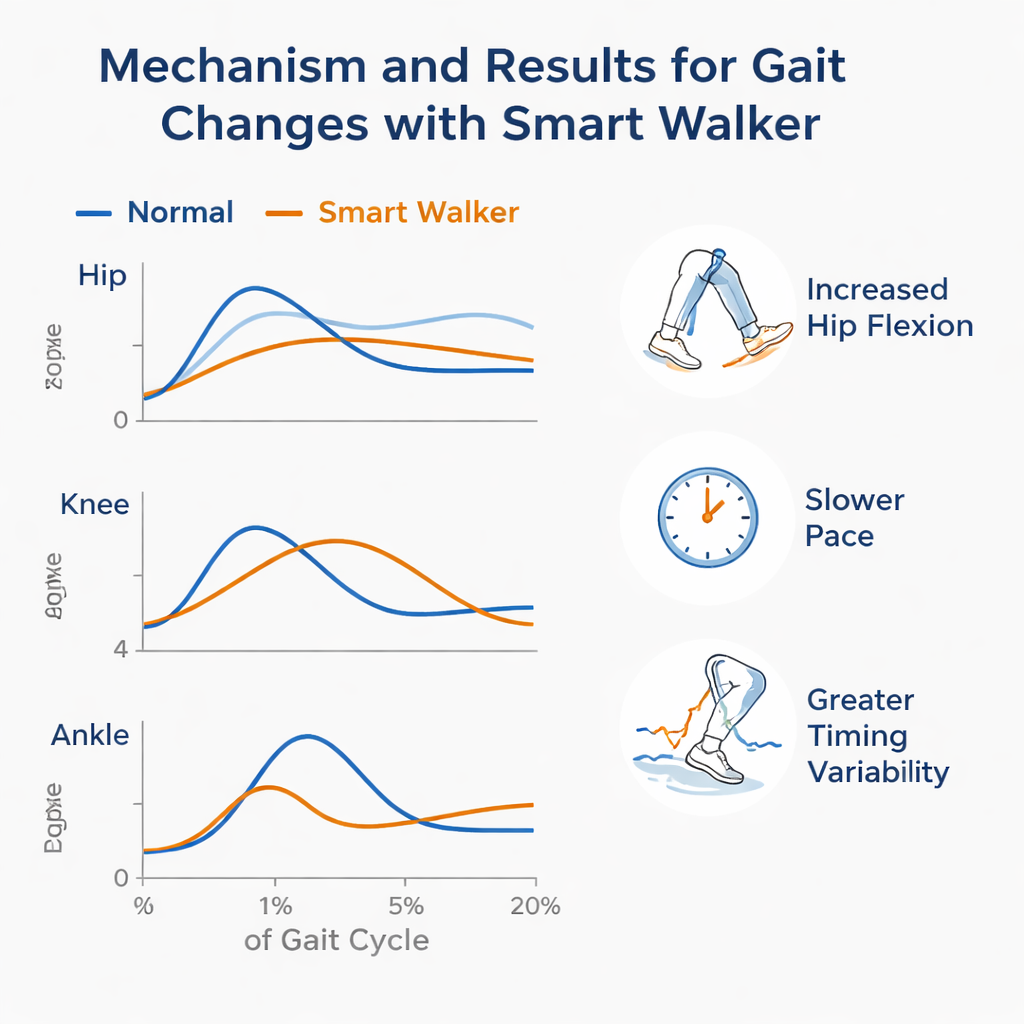
スマート歩行器使用時には、被験者はよりゆっくり歩き、歩幅は短くやや狭くなり、両足が同時に地面にある時間が増加しました。歩と歩の間のタイミングのばらつきも大きくなりました。関節角度も変化し、歩行中を通じて股関節はより屈曲(前かがみ)した姿勢を保ち、スイング期には膝の屈曲が小さくなる傾向が見られました。多くの足首や股関節の動きが増加したのは、前腕支持を握って前かがみの姿勢をとることに起因すると考えられます。これらの変化はランダムではありません。研究者らは主成分分析という統計手法を用いて、関連する計測値を歩行の速度、リズム、左右対称性、支持基底や関節運動といったより広い“ドメイン”にまとめました。通常歩行では従来の加齢研究で見られる明確なドメインが確認されましたが、歩行器補助歩行では脚の振りや体重が部分的に支えられる状況での歩幅生成に特有の新たなドメインを含む異なるパターンが示されました。
歩行に潜む隠れたパターン
標準的な歩ごとの指標と関節運動データを組み合わせることで、歩行の各要素がどのように協調しているかが明らかになりました。通常歩行では、歩行速度と変動性が一つの主要ドメインを形成し、リズム、対称性、支持基底が別のドメインを形成しました。関節角度を加えることで股関節、膝、足首それぞれの運動パターンが分離されました。しかしスマート歩行器使用時には、初期支持期における膝と足首の動きが歩行速度と強く結び付き、脚のスイング中の股関節と膝の動きは左右の歩の差と関連しました。さらに「ステップダイナミクス」と呼ばれる新しいドメインは、歩幅、タイミング差、足首のプッシュオフが歩行器使用時にどのように相互作用するかを捉えていました。これらの機器に特有のドメインは、スマート歩行器が単にユーザーを安定させるだけでなく、各歩を生み出す際の脚の協調を能動的に再形成していることを示唆します。
高齢者のより安全な歩行への意味
非専門家向けの要点は、スマート歩行器は歩行をより遅く管理されたものにする一方で、前かがみ姿勢や通常歩行とは異なる歩行タイミングや脚の動きのパターンを促すということです。これらの機器主導の変化が必ずしも有害というわけではなく、短期的には被験者がより安全に感じる助けになる可能性があります。しかし、リハビリテーションプログラムが慎重な調整なしにスマート歩行器に頼りすぎると、後に元に戻しにくい歩行スタイルを「学習」してしまう恐れがあります。著者らは、セラピストや設計者が支援レベル、ハンドル高さ、訓練目標を本研究の知見に基づいて調整し、スマート歩行器が永続的な不利な習慣を固定する杖ではなく、安全でより自然な歩行への踏み台として機能するようにすべきだと主張しています。
引用: Elias, A., Loureiro, M., Machado, F. et al. Gait adaptations to walker-assisted locomotion in elderly: a principal component analysis of spatiotemporal and kinematic parameters. Sci Rep 16, 6872 (2026). https://doi.org/10.1038/s41598-026-37448-4
キーワード: スマート歩行器, 高齢者の歩行, 転倒予防, リハビリテーションロボティクス, ウェアラブル動作センサー