Clear Sky Science · ja
混雑環境における異種UAV–UGVチームの安全な編隊スケーリングと軌道計画
空と地上で連携するロボットたち
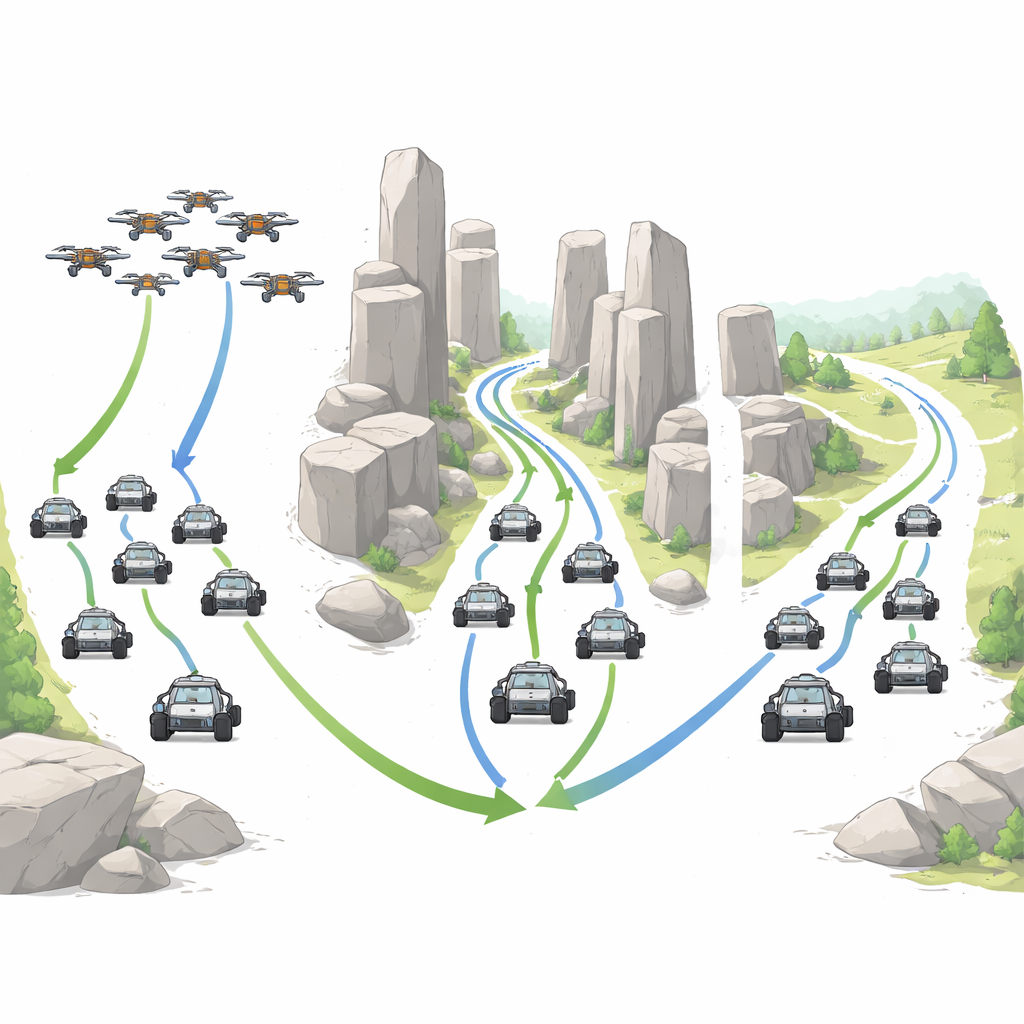
災害現場の上空を偵察する小型飛行ドローンの群れと、瓦礫の間を進む頑丈な地上車両が一つの協調チームとして動く光景を想像してください。本論文は、こうした混合ロボット群を、狭く障害物の多い空間でも衝突や慌ただしい再計画を避けつつ維持する方法を探ります。著者らは、空中と地上のロボットが安定した編隊を共有し、狭い隙間を通り抜け、かつ迅速かつ安全に目的地へ到達できる新しい手法を提案します。
なぜ混合ロボットチームの協調は難しいのか
飛行ドローンと車輪式地上車両は挙動が大きく異なります。ドローンは三次元空間を素早く移動し、風などで軌道を容易に乱されます。地上車両は旋回制限や起伏のある地面に対処しなければなりません。それでも、捜索救助やインフラ点検など多くの実務では、これらが三次元的に一体となって移動できれば有利です。既存手法の多くは編隊維持と障害物回避を別個の問題として扱います。環境が混雑すると編隊は崩れ、その後再結合するため時間を浪費し、衝突のリスクが高まります。
編隊を保つための新しいアプローチ
これに対処するため、著者らは編隊の形状制御と運動計画を密接に結び付けるフレームワークRG–ASAPFを設計しました。その中核は編隊を「剛体」構造として数学的に記述することです:ロボット間の望ましい距離を選ぶことで、全体形状が安定した3D足場のバーのように一意に決まるようにします。各ロボットは共通の規則に従って自らの動きを調整し、編隊が移動・旋回している間もこれらの距離を回復・維持します。この規則は空中と地上の両方に対応するよう設計されており、モデル化されていない摩擦や小さな外力などの不確実性にもオンラインで適応します。
狭隘部で編隊を“呼吸”させる
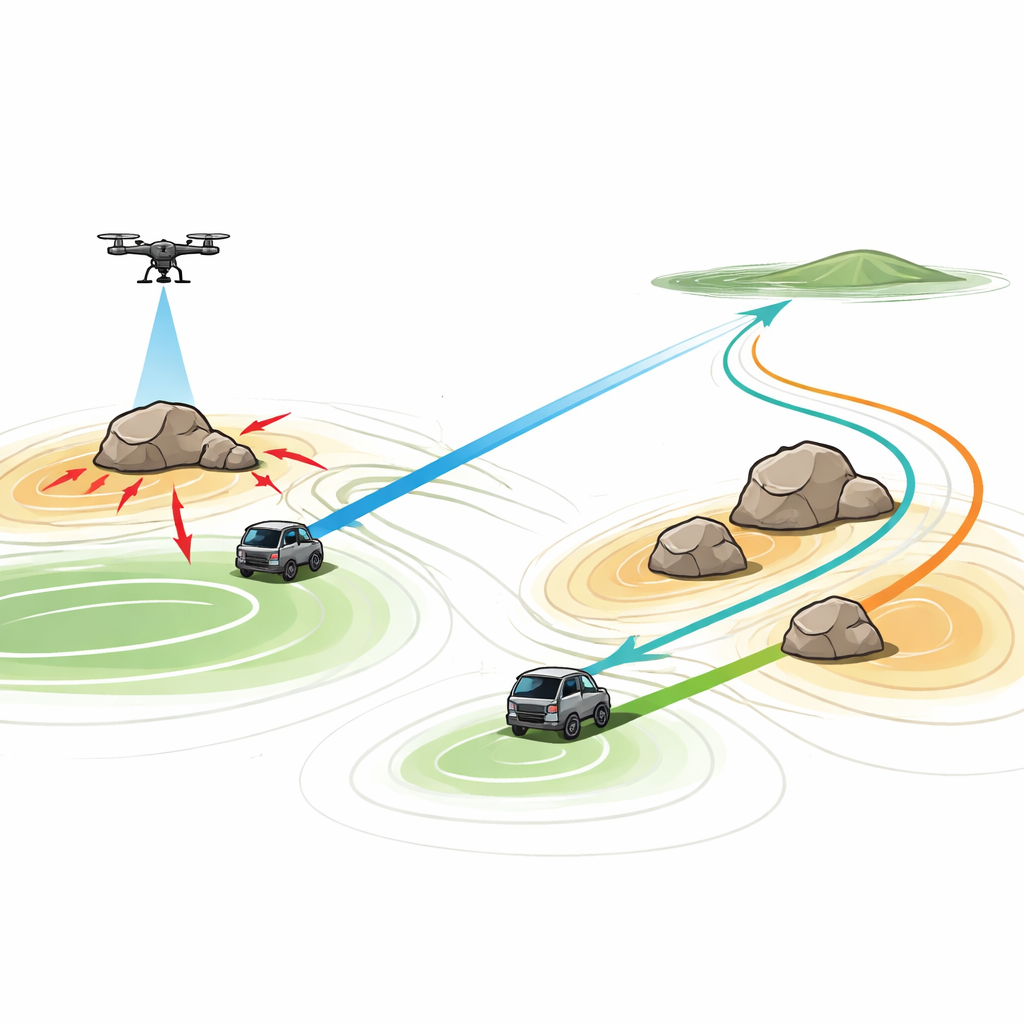
実世界の環境は広い野原ばかりではなく、建物や樹木、車両や動く物体で満ちています。開けた場所で安全な編隊でも、狭い路地や障害物の密集地帯を通るには大きすぎることがあります。提案手法では編隊の基本構造を保ちながら全体のサイズを滑らかにスケール(縮小・拡大)できます。チームにはリーダーとなる地上車両を設定し、人工ポテンシャル場を用いて経路を計画します。目的地は引力の役割を果たし、障害物は編隊を押し戻します。従来のポテンシャル場が行き止まりに陥ったり不安定な振る舞いを引き起こしたりするのに対し、彼らの「適応的安全」版は障害物の反発力を継続的に調整し、過度に慎重になって動けなくなることなく安全距離を保ちます。
混雑と運動の中で賢く通る経路
ポテンシャル場はさらに洗練され、引力と反発の「ランドスケープ」が常に目的地を最も低い点(最小)に保つようにしています。これにより障害物の間に編隊が取り残されるのを防ぎます。反発効果の強さは初期のニューラルネットワーク学習から借用した単純な学習則で動的に調整されます。ロボットが障害物に近づきすぎると反発は自動的に強まり、十分なクリアランスがあると緩和されます。環境が極端に狭く、縮小した編隊でも安全に通れない場合はフォールバック動作が発動します:チームは一時停止して仮想の安全回廊を確保し、問題領域の周りを回避するより安全な経路を再計画してから進行を再開します。
仮想世界での検証
手法の有効性を評価するため、著者らはドローンと地上車両の混合チームで大規模なコンピュータシミュレーションを実行しました。障害物がほとんどない開けた空間、障壁の多い密集迷路、動く障害物を含むシーン、六角柱のようなより複雑な3D形状に編隊を変形させる必要がある場合などを試験しています。いずれのケースでも編隊は三次元で一体性を保ち、静的および動的障害物を安全に回避し、必要に応じてサイズを調整しました。ロボットは障害物に対してジグザグに迂回するのではなく、滑らかで効率的な経路をたどりました。従来の古典的・改良型ポテンシャル場、粒子群最適化、線形・非線形のモデル予測制御などの人気手法と比較しても、新手法は一般に経路が短く滑らかでエネルギー効率が良く、重い最適化ベースの技術よりも計算が速い結果を示しました。
現実のミッションへの示唆
専門外の読者に向けた要点は、本論文が飛行と走行を混在させたロボットチームを、混雑した三次元空間で一つの柔軟な塊のように動かせることを示した点です。障害物が現れるたびに編隊が解散するのではなく、編隊は曲がり、縮み、向きを変えつつ一貫性と安全性を保てます。これは災害対応、産業点検、警備巡回などでより迅速かつ信頼できるロボット支援につながる可能性があります。現時点の研究はシミュレーションで示され、指定されたリーダー車両に依存していますが、著者らはより耐障害性のあるチームや実世界実験に向けた今後の展開を示しており、空–地連携ロボット群の厳密な協調の実現を現実に近づけています。
引用: Chen, Q., Liu, X., Nie, W. et al. Safe formation scaling and motion planning for heterogeneous UAV–UGV teams in cluttered environments. Sci Rep 16, 9127 (2026). https://doi.org/10.1038/s41598-026-37211-9
キーワード: マルチロボット編隊, UAVとUGVの協調, 障害物回避, 軌道計画, スワームロボティクス