Clear Sky Science · ja
腕長さの無段階パラメータ化と適応的力トリガーインピーダンスブレンドを備えた上肢遠隔操作用外骨格
安全な距離からのより安全なハンズオン作業
地球上や宇宙で最も危険な仕事の多くは、依然として人間の判断力と器用さを必要とします。損傷した原子力施設の修理、爆発物の取り扱い、宇宙船の安定化などが例です。本研究は、着用者が自分の腕のように遠隔のロボットアームを操作でき、安全な距離を保ちながら危険を避ける新しい駆動式上肢外骨格を提示します。本装置は、さまざまな腕の長さや環境中で変化する力に適応しつつ、ロボットが着用者の身体の自然な延長のように動き、かつ“感じる”ように設計されています。
遠隔アームが重要な理由
ロボットはすでに水中や災害現場、原子炉内部で働いていますが、多くは事前にプログラムされているか単純なジョイスティックで操作されています。そのため、状況が急変したときに対応できる能力が限られます。人間がリアルタイムで遠隔ロボットを制御するテレオペレーションは、人間の判断力とロボットの力・リーチを組み合わせる中間的な解です。従来のシステムは工具を動かすことはできても、力に関する精密なフィードバックが不足し、異なるユーザーの身体に容易に合わせられないことが多かった。その結果、動作がぎこちなく“感覚”が乏しく、操作者と機械の両方に余分な負担がかかっていました。
本当にフィットするウェアラブルロボットアーム
研究チームは、肩、肘、手首に対応する7つの駆動関節を備えた上肢用ウェアラブル外骨格を構築しました。カーボンファイバーやアルミニウムなどの軽量材料を用いることで、装置は重く鈍くなることなく応答性を保ちます。大きな革新点は、上腕と前腕の長さを数段階の固定設定ではなく滑らかに調整できることです。内蔵された電気センサを備えたスライドレールが着用者の実際の腕長を連続的に測定し、その情報をデジタルな身体モデルに渡します。その結果、装置は各人の内部ジオメトリを自動的に再構成し、快適性を向上させるとともに、ロボットの動作を人間の意図により忠実にします。 
身体とともに動く、身体に逆らわない
人間の肩は単に蝶番のように回るわけではなく、肩甲骨が肋骨の上を滑る動きもあります。多くの外骨格はこれを無視して自然な動きに抵抗し、違和感を生じさせます。本設計は、肩や上体の微細なずれに追従するいくつかの自由度を持つ受動モジュールを追加し、皮膚や関節への圧迫を和らげます。同時に、駆動関節のトルク(ねじり力)は人体組織に対する安全限界以下になるよう調整されています。非常停止やジャム検出器などの安全機能も揃えており、問題が発生した際に迅速に反応できます。
接触を感じる賢いやり方
機構面を越えて、著者らは着用者が受ける感覚に注目しています。遠隔ロボットが壁や工具の柄、その他の物体に触れたり押したりしたとき、その力は外骨格を通じて着用者に伝えられ、抵抗として感じられます。制御システムは通常相反する二つの要件、すなわち操作者の動作を正確に追従することと、接触力が大きくなったときに柔らかく順応的に振る舞うことをブレンドします。低い力のときはシステムは剛性を保ち正確に着用者の腕経路に従いますが、力が安全閾値を超えると自動的に柔らかくなり、衝撃を鋭く受け止めるのではなくいくらかの遊びを許して衝撃を緩和します。著者らはエネルギーベースの数学的手法を用いて、このブレンドされた挙動が振動に陥るのではなく安定を保つことを示しています。 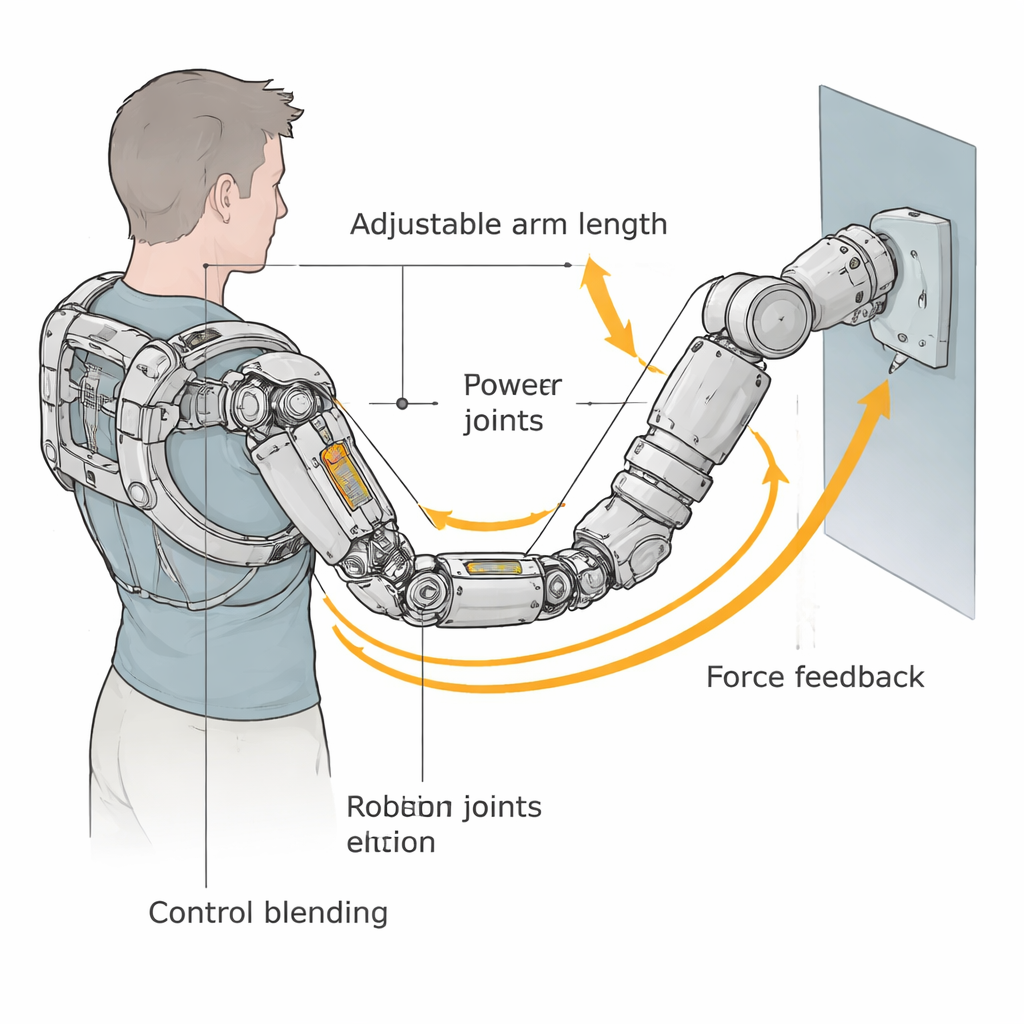
システムの実地試験
外骨格を評価するため、研究者たちはそれを広く使われている産業用ロボットアームに接続しました。着用者が空中でフィギュアエイトを描くと、遠隔ロボットは通信遅延が小さくてもその動作を忠実に再現しました。腕長センサの性能を調べる追加試験では、スライドセンサの電圧読み取り値が実測と一致し、脱着を繰り返しても誤差は数ミリ以下でした。ロボットが仮想の剛体壁に押し当てられる制御下のシミュレーションでは、完全な制御方式が基本構成に比べてピーク接触力をほぼ70%低減し、自由運動時の追従精度を大きく損なうことなく維持しました。
現場作業とケアにもたらす意義
日常的な言い方をすれば、この研究は遠隔ロボットが自分の腕を動かすのと同じくらい自然で安全に操作できる世界に近づけます。身体に沿って調整可能なフレーム、人間の動きを注意深く追跡する機構、状況に応じて即座に適応する賢い力フィードバックを組み合わせることで、このシステムは危険環境でのより精密で疲れにくいテレオペレーションを約束します。同じ技術は、脳卒中から回復中の患者にも応用でき、セラピストが腕の動きをガイド・記録しながら、患者が実物に近い補助とフィードバックを受けられるようになります。将来のバージョンで筋電や視線などの信号を統合し経験から学習するようになれば、このような外骨格とロボットの組は、極限環境の任務から日常のリハビリまで幅広い用途に使える多目的なツールになるでしょう。
引用: Zeng, P., Xu, Y., Zheng, S. et al. An upper-limb teleoperation exoskeleton with stepless arm-length parameterization and adaptive force-triggered impedance blending. Sci Rep 16, 7529 (2026). https://doi.org/10.1038/s41598-026-37205-7
キーワード: 遠隔操作外骨格, ロボットアーム制御, 力フィードバック, リハビリテーションロボティクス, 遠隔危険作業