Clear Sky Science · ja
強化学習による拡張を備えたトンネル事故向けエンドツーエンド緊急対応プロトコル
なぜより賢いトンネル救助が重要か
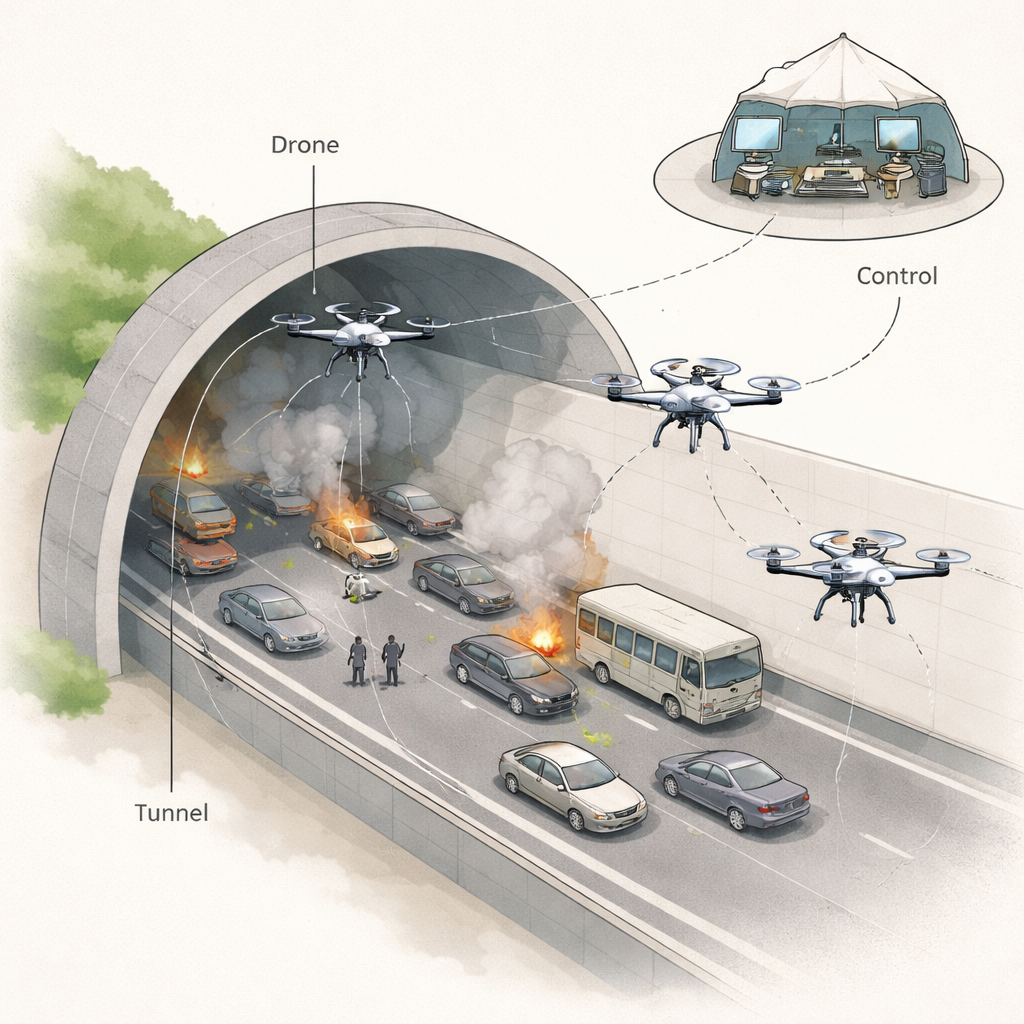
高速道路トンネルで事故や火災、構造崩壊が起きると、人々は出口がほとんどない長く煙の立ちこめた迷路のような管内に閉じ込められます。視界が悪化し、温度が上昇し、がれきが道を塞ぐ中で、人間の救助隊は危険の中に突入しなければなりません。本研究は、小型の飛行ロボット、つまりドローンが賢い学習戦略によって導かれることで、こうした危険な状況で迅速かつ信頼できる支援者となり得る可能性を探ります。ドローンは被災者を見つけ、安全な経路を把握して人間のチームを最も危険な場所から遠ざける役割を果たします。
危険な地下のボトルネック
現代都市は高速道路や鉄道、インフラのためにトンネルに依存していますが、効率的な密閉構造は内部での事故を特に致命的にします。火災は煙を速く広げ、有毒ガスが溜まり、狭い通路は衝突した車両や落下したコンクリートで塞がれます。従来の救助隊は限られた情報のもとで突入することが多く、厚い岩盤やコンクリートを通して無線が届かない中で行き先を手探りで判断しなければなりません。中国や日本などで起きた過去の災害は、被災者に間に合って到達することの難しさを示しており、人間にはできない方法で先を見通し観測するツールの必要性を浮き彫りにしています。
ドローンに探索と捜索を教える
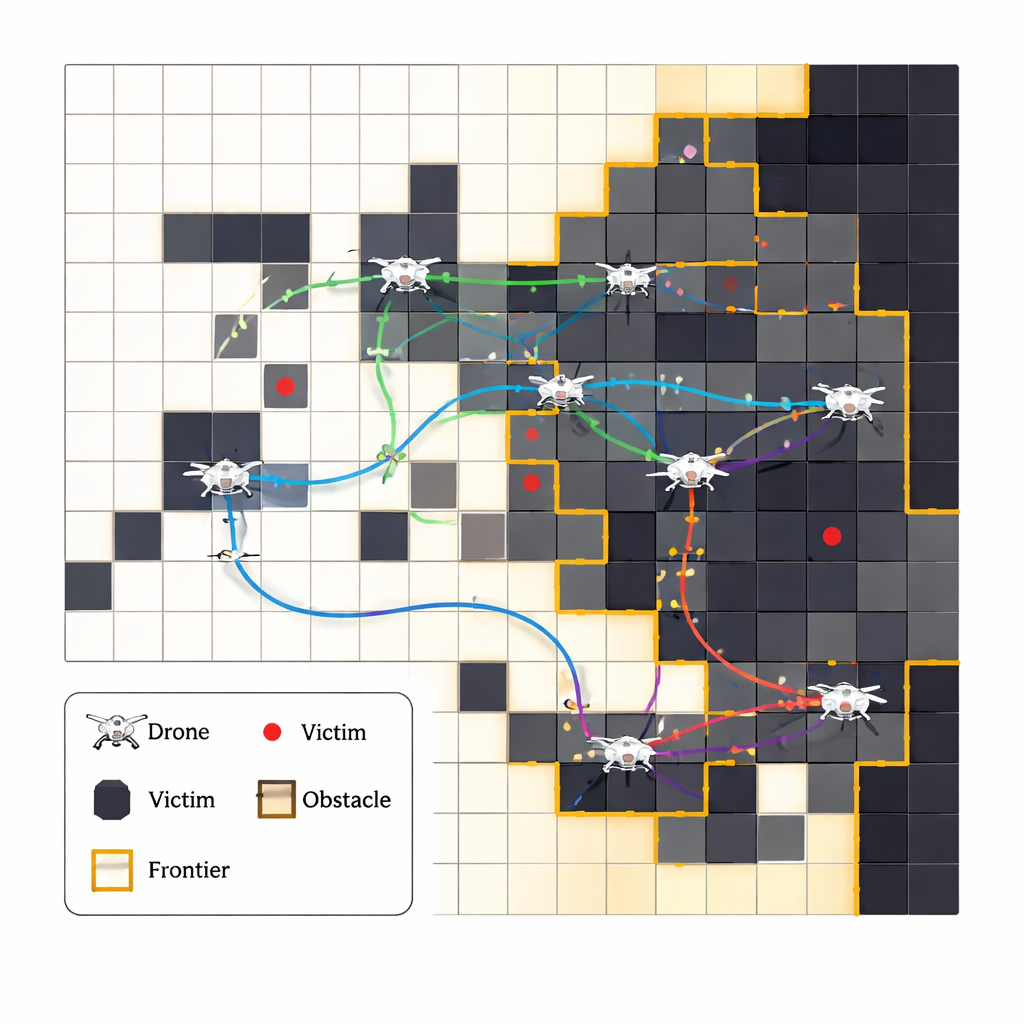
著者らは複数の自律ドローンが協調して損傷したトンネルを探索し、ライブマップを作成して閉じ込められた人々を見つけるシステムを提案します。あらかじめ決められた固定ルートを追う代わりに、各ドローンは強化学習と呼ばれる手法で経験から学びます:行動を試し、その結果を観察し、どの選択がより速い救助やミスの少ない結果に繋がるかを徐々に見出します。トンネルはセルの格子で表現され、ドローンは既知領域と未知領域の境界である「フロンティア」に注目してその境界を外側へ押し広げていきます。各ステップで小さな格子移動の選択肢から動作を選び、似た状況でどの動きが有効だったかを示す内部の表(テーブル)を更新します。
やり取りを減らして多数のロボットに協調させる
複数のドローンを同時に同じトンネルで捜索させると、新たな課題が生じます:通信が不安定な場合に互いに衝突したり、同じ領域を何度もスキャンしてしまうのをどう避けるか。中央の指揮や継続的な無線交信を与える代わりに、研究者らは静かに良い集団行動を促す単純なスコアリングシステムを設計しました。ドローンは新しい被災者を発見したときに大きな報酬を得ますが、同じ場所を無駄に再訪したり、他のドローンと衝突したり、バッテリー切れで「失敗」した場合は罰則を受けます。時間が経つにつれて、各ドローンは未探索領域を好み、仲間から離れて行動する傾向を強めるようになります。こうして技術的にはそれぞれが独立して学習していても、共有される帰結によって協調が自然に生まれます。
立ち往生を避けるためにオオカミの知恵を借りる
純粋な試行錯誤学習は、安全だが二番目に良い習慣に陥ることがあります—いつも慣れた通路を選び、危険だが有望な近道を試さない、といった具合です。ドローンの好奇心を維持するために、研究チームはグレイウルフ最適化(Grey Wolf Optimization)という群れで狩る灰色オオカミの数学モデルから着想を借りました。これによりドローンは時折これまでに最も良い成績を上げた探索パターンを模倣しつつも、探索の余地を残します。実際には新しい行動の試行を形作り、学習プロセスが袋小路から抜け出し、たとえば経路の一部が突然火災やがれきで塞がれた場合でも適応できるようになります。
仮想災害で手法を検証する
未検証の戦略を実際の緊急トンネルで試すのは安全ではないため、研究者らは狭い通路、行き止まり、障害物、散在する被災者を模した詳細なコンピュータシミュレーションを構築しました。彼らは学習ベースのシステムを純粋なランダム探索や学習を伴わない単独最適化など複数の手法と比較しました。単一ドローンと複数ドローンの両方の試験で、本アプローチは被災者をより速く発見し、無駄な移動を減らしてトンネルのより多くを探索し、衝突回避もより確実に行いました。重要なのは、これが消費電力の大きい深層学習ネットワークではなく軽量なテーブルベースの計算で実現されているため、実際の緊急時に小型の搭載コンピュータ上で現実的に動作し得る点です。
将来の救助にとっての意義
本研究は、比較的単純なドローン群が慎重に設計された学習ルールと自然から借用した幾つかの発想によって、トンネル災害における消防隊や救助隊の有力なパートナーになり得ることを示しています。煙で満ち、環境が変化する状況を迅速にマップし、常時の人間の指揮がなくても被災者のありそうな場所へ向かうことで、対応時間を数分短縮し第一次対応者のリスクを減らせる可能性があります。これまでの成果はシミュレーションと理想的なセンサーに基づくものですが、限られた時間、エネルギー、計算資源の下で最も過酷な救助現場でも機能する実世界システムのための実用的な基盤を築いています。
引用: ur Rehman, H.M.R., Gul, M.J., Younas, R. et al. End-to-end emergency response protocol for tunnel accidents augmentation with reinforcement learning. Sci Rep 16, 6226 (2026). https://doi.org/10.1038/s41598-026-37191-w
キーワード: トンネル緊急対応, 捜索救助ドローン, マルチエージェント強化学習, ロボティクス災害管理, 自律探索