Clear Sky Science · ja
拡張カルマンフィルタを用いた動的エネルギー貯蔵充電ロボットのリアルタイムSOC推定と自律充電戦略
ロボット電池を賢くすることがなぜ重要か
倉庫の配送ロボットから点検用ロボットまで、移動ロボットの有用性はバッテリー次第です。ロボットが残りのエネルギーを誤判断すると、充電器から遠く離れた場所で停止し、作業を中断させたりバッテリーを損なう危険があります。本論文は、ロボットが実際のバッテリー残量をリアルタイムで「正しく知る」方法と、自律的にいつどのように充電するかを選ぶ手法を提示します。これにより、より長く、安全に、かつ人手をかけずに稼働できるようになります。

多忙なタスクと負荷にさらされるバッテリー
高速道路を穏やかに走る電気自動車とは異なり、多くの移動ロボットは急発進・急停止や頻繁な負荷変動に直面します。こうしたショックはバッテリーの電流と電圧を急激に変動させ、従来の残量推定手法を混乱させます。電圧を単純に読む方法や時系列で電流を積算する方法は、安定した条件を前提としがちで、バッテリーの劣化や発熱を追跡しません。その結果、推定はずれ、誤差が蓄積し、頻繁に充電してしまったり無理に使い続けて寿命を縮めたりします。
電池内部で何が起きているかをより現実的にモデル化する
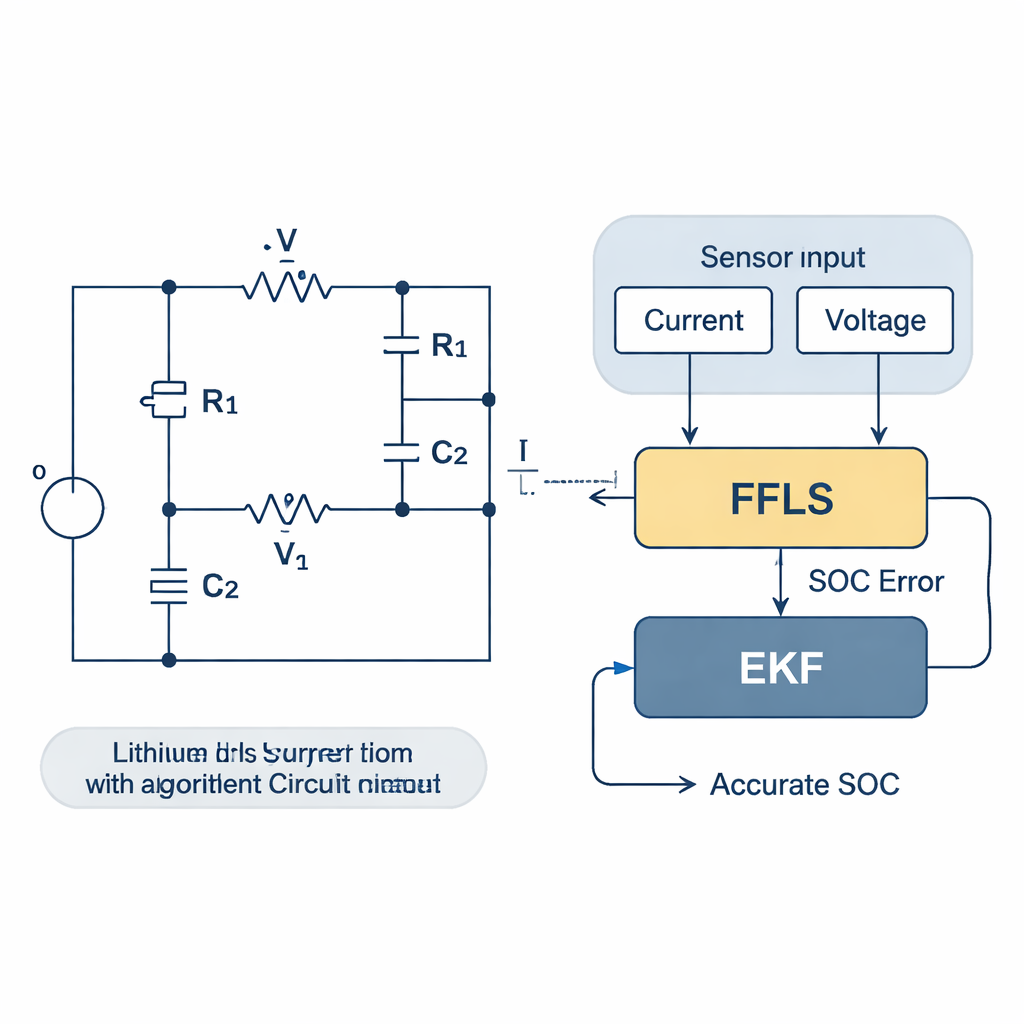
著者らはこれに対処するため、リン酸鉄リチウム電池パックをより現実的に表現するモデルをロボットに与えます。電池を単一の電圧だけで扱うのではなく、内部抵抗と、セル内部でのイオン移動や蓄積を模した二つの「分極」ブランチを持つ電気ネットワークとして表現します。この2次のRCモデルは、負荷変動に対する速い応答と遅い応答の両方を捉えます。ロボットは継続的に電流と電圧を測定し、これらの信号を忘却係数を含む最小二乗法でモデルに適合させます。忘却係数は、最近のデータにより重みを置き、条件が変わったときに古い履歴を薄める数学的手段です。
アルゴリズムに現場で学習・適応させる
このモデルの上に、研究チームは拡張カルマンフィルタを適用します。拡張カルマンフィルタはノイズのあるデータから隠れた状態を追跡するために広く使われる手法で、ここでの隠れた状態はバッテリーの真の充電状態です。ロボットが稼働するにつれて、フィルタはモデルと測定された電流に基づいて充電量の変化を予測し、測定電圧でその予測を補正します。忘却係数付き最小二乗モジュールが主要なモデルパラメータをオンラインで更新し続けるため、フィルタは工場出荷時の古いキャリブレーションに依存しません。巧妙なのは、内部抵抗と分極容量という量の間の関係を利用している点です:温度が上がると抵抗は下がり、容量は増加します。これらを同時に観察することで、物理的な温度センサなしに温度効果を推定し、モデルを適切に調整できます。
ロボットに充電のタイミングと方法を教える
正確な充電推定は物語の半分に過ぎません。もう半分は、ロボットがその推定をどう使うかです。著者らは継続的な「微補充」や過度の深放電の両方を避ける自律充電戦略を設計しました。上限と下限の充電閾値を定め、バッテリーが下限を下回ればロボットはドックに戻ることを優先し、すでに上限近くにある場合は充電を先延ばしにして稼働を続けます。安全な範囲内では、アイドル時間に充電を行います。システムはバッテリーパック内の各セルも監視し、あるセルが満たされる一方で他が遅れないようにバランスを取ります。これは早期劣化を防ぐ重要な手順です。ドッキングを効率化するために、ルームレベルのナビゲーションと短距離赤外誘導を組み合わせ、経路とドッキング時間を短縮します。
より長持ちで信頼性の高いロボット電源
公開バッテリーデータセット、シミュレーション、実機ロボットを用いた試験では、新手法は充電状態を約98%の精度で推定し、パーティクルフィルタ、ニューラルネットワーク、トランスフォーマーに基づく複数の高度な代替手法を明確に上回りました。本手法で管理されたバッテリーは、数週間の模擬使用で電荷をより良く保持し、競合手法より15~40%多くの充放電サイクルを生き延びました。内部抵抗の増加が緩やかであり、これはセルの健康状態が良好であることを示す指標です。ロボットはドックにいる時間が短く、バッテリーの健全性を維持しながら稼働時間を延ばせました。一般読者への結論は、この手法によりロボットが自分のバッテリーをより上手に「管理」できるようになるということです:エネルギーをより正確に判断し、賢いタイミングで充電を選び、高価なバッテリーパックの寿命を追加のセンサや重い計算資源なしに静かに延ばせます。
引用: Zhou, Y., Liang, X., Li, W. et al. Real time estimation of battery SOC and autonomous charging strategy for dynamic energy storage charging robot with extended Kalman filter. Sci Rep 16, 7810 (2026). https://doi.org/10.1038/s41598-026-37184-9
キーワード: 移動ロボット, バッテリーの充電状態, 自律充電, 拡張カルマンフィルタ, リン酸鉄リチウム電池