Clear Sky Science · ja
変形可能畳み込みネットワークとチャネル間座標注意を用いた車両検出のためのYOLO-DC
カメラで車を検出することがなぜ重要なのか
現代の都市は、混雑した道路を監視して渋滞を管理し、自動運転車の実現を支えるカメラに大きく依存しています。しかし、カメラ映像からすべての車両を確実に検出するのは意外に難しく、遠方で極小に映る車両、渋滞で一部が隠れた車両、雨や霧、暗闇でぼやけた車両などがあると特に困難になります。本論文はYOLO‑DCという新しいコンピュータビジョンシステムを紹介します。これは現実世界の厄介な条件下や計算資源が限られた機器上でも、車やバスなどの車両を迅速かつ高精度に検出することを目指しています。
研究が取り組む交通の課題
都市の発展に伴い道路の渋滞、事故の増加、排出量の増大が問題になっています。スマート交通システムは交通をリアルタイムで監視し、人間や自動運転車を誘導することで支援を約束します。その核心は映像中の車両を高速かつ確実に検出することです。かつての「二段階」アルゴリズムは画像を複数回走査して非常に高い精度を出せますが、路側カメラや車載装置でのリアルタイム運用には遅すぎることが多い。近年の「単段」システム、例えばYOLO(You Only Look Once)系列は複雑さを若干犠牲にする代わりにはるかに高速で、実用上広く使われています。それでも小さく重なった車両や、詳細を隠す厳しい天候条件には弱点があります。YOLO‑DCは最新のYOLOv8モデルを基盤に、これらの課題に対処するために内部の層を再設計しています。
より賢い焦点でYOLO‑DCはより多くを見通す
YOLO‑DCの中心は改良された「バックボーン」ネットワークで、生の画像を抽象的な特徴に変換する最初の部分です。著者らはチャネル間座標注意と呼ばれる仕組みを導入しており、これはネットワークに画像のどこを見ればよいかだけでなく、どの種類の視覚パターンにより重みを置くべきかを効果的に教えます。これに変形可能畳み込み(サンプリングパターンを曲げて斜めや不規則な形状の車両に追随できるフィルタ)を組み合わせることで、異なる角度やスケール、位置で見える車両により適応できるバックボーンが実現します。道路のすべての領域を同等に扱うのではなく、実際の車両を建物や木、路面表示と区別するための特徴的な輪郭やテクスチャを強調することを学習します。
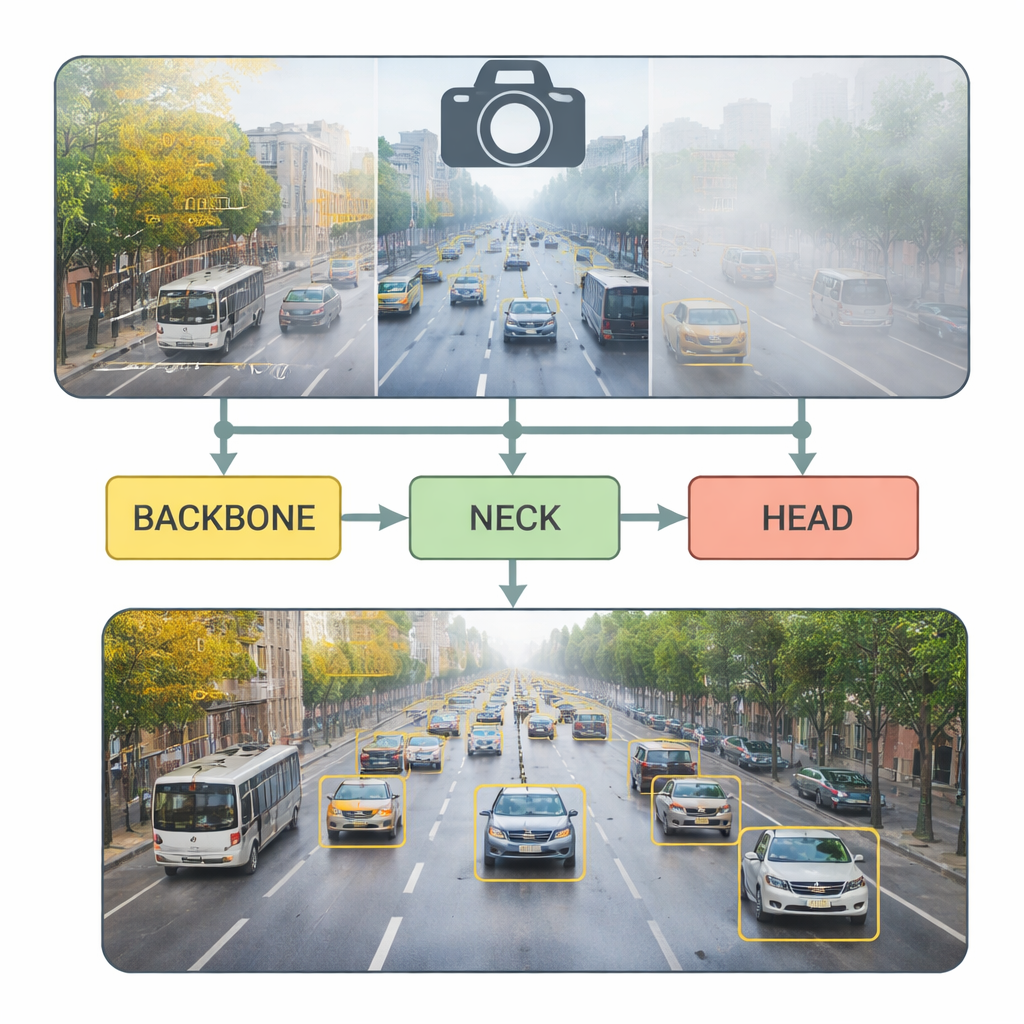
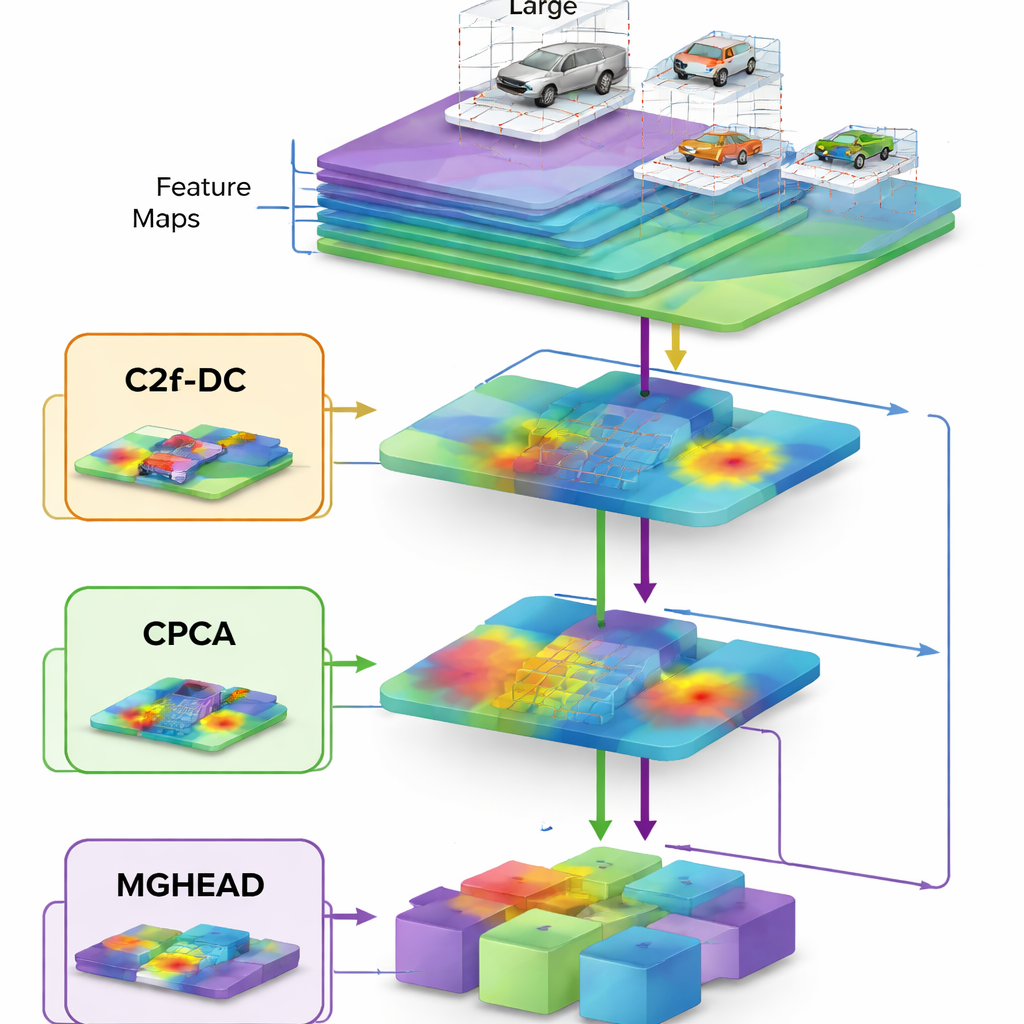
速度を落とさずに小さく遠い車両を捉える
モデルの中間部、いわゆるネックは、粗いズームアウトした視点の情報と細かいクローズアップの詳細を融合する役割を担います。YOLO‑DCはこの段階を二つの方法で強化しています。まずチャネル事前注意モジュールがネットワークにノイズの抑制と、フレーム内で遠方にある小さな車両からの微妙な手がかりを強調する手助けをします。次に、軽量なFasterNetアーキテクチャに触発された再設計ブロックが、データの一部にだけ完全畳み込みを適用して効率的に混合することで演算量を削減します。この慎重な再設計により、パラメータ数とメモリ転送量の両方が減り、処理が速くなる一方で精度が向上するという、エッジデバイス(交通カメラや車載コンピュータなど)にとって非常に望ましい組み合わせが得られます。
多様なサイズと悪天候下でも車両を見分ける
最終段階、いわゆるヘッドは物体の位置と種類を決定します。YOLO‑DCはここでマルチスケールグループ畳み込みを導入し、特徴マップを複数のチャネルグループに分割して各グループが異なるフィルタサイズを使った後で再結合します。これにより検出器はより豊かなスケール感を持ち、一度に画面いっぱいに広がる大型バス、中型トラック、遠方にかろうじて見える小さな車まで認識できます。曇り、晴れ、雨、夜間の条件を含む道路シーンを収めたUA‑DETRACデータセットでの大規模なテストでは、YOLO‑DCは最先端の検出器と同等かそれ以上の精度を達成しつつ、必要な計算量はそれらのごく一部にとどめ、最新ハードウェア上で毎秒数百フレームの処理を実現しました。霧、雨、雪、砂嵐を対象としたDAWNデータセットでは、特に豪雨や濃霧で従来のシステムが失敗しがちな場面で大きな改善を示しました。
日常の道路にとってこの結果が意味すること
非専門家に向けた主要なメッセージは、YOLO‑DCが実際の交通をそのままに近い形で「見る」能力に優れているということです。混雑し、乱雑で、悪天候や照明不良でしばしば隠れる状況でも有効です。車両の形状に追従する柔軟なフィルタと、最も情報量の多い領域に焦点を当てる注意機構を組み合わせることで、より多くの車両を検出し、見落としを減らし、控えめなハードウェアでもライブ映像解析に十分な速度で動作します。これにより、より賢い交通管理、信頼性の高い事故監視、安全な自動運転の構成要素として有望であり、処理コストを低く抑えて都市全体や将来の車両に広く展開できる可能性があります。
引用: Liu, Z., Zhu, M., Gao, B. et al. YOLO-DC for vehicle detection using deformable convolutional networks and cross-channel coordinate attention. Sci Rep 16, 6284 (2026). https://doi.org/10.1038/s41598-026-37094-w
キーワード: 車両検出, インテリジェント交通, YOLO, 悪天候, リアルタイムビジョン