Clear Sky Science · ja
荷重を考慮した運動プロファイリングによるマルチAGVシステムのスケジューリングのための動的チェーン
なぜ倉庫ロボットはより良いタイミングを必要とするのか
オンラインショッピングの普及により、倉庫には迅速かつ安全に、そして24時間体制で移動させる必要のある物資があふれています。多くの施設では床上を走るロボット群、いわゆる自動誘導車両(AGV)が棚やパレットを運搬しています。しかし、これらロボットの動きを単純化した仮定でスケジュールすると、時間を無駄にしたり、壊れやすい荷物を揺らしたり、場合によっては衝突のリスクを高めたりします。本稿は、複数のAGVを同時に計画・調整する新しい方法を示し、実際の物理的挙動を考慮することで、混雑した倉庫でも円滑な交通と荷物の安全を実現することを目指します。
数だけでなく荷物を動かすロボット
現代のAGVは倉庫や空港、工場で既に行き交い、カートを牽引したり棚やパレットを持ち上げたりしています。こうした車隊を管理する既存ソフトウェアの多くは高レベルで機能し、どのロボットがどの仕事を担当するかや大まかな経路を決めます。計算を単純化するために、通常は2点間の移動時間を固定とみなしており、ロボットが実際にどれだけ速く加速・減速できるかや荷重の重さを無視します。著者らは、この近道が実際の現場で問題を生むことを示します。ロボットは交差点に想定より早く到着したり遅れたりし、渋滞やニアミス、あるいは搭載物を揺らすような急ブレーキの可能性が高まります。
スケジュールに現実の物理を組み込む
研究者たちは、物理とスケジューリングを組み合わせた二段階のアプローチでこのギャップに取り組みます。まず、AGVのための動的走行時間推定器、DTT-AGVを設計します。通路を単一の時間区間として扱うのではなく、DTT-AGVは各移動を加速、定速走行、減速という段階に分けます。模型としては、棚を運ぶAGVをばねとダンパーでつながれた質量として単純化した機械モデルを用います。このモデルは加減速が荷重を揺らしたり振動させたりする様子を捉えます。ここから、アルゴリズムは速度、力、振動の制限を超えない範囲で、与えられた距離と荷重に対して車両が安全に走行できる速度を算出し、経路の各区間に対して現実的な走行時間を返します。
ロボット同士の正面衝突を防ぐ
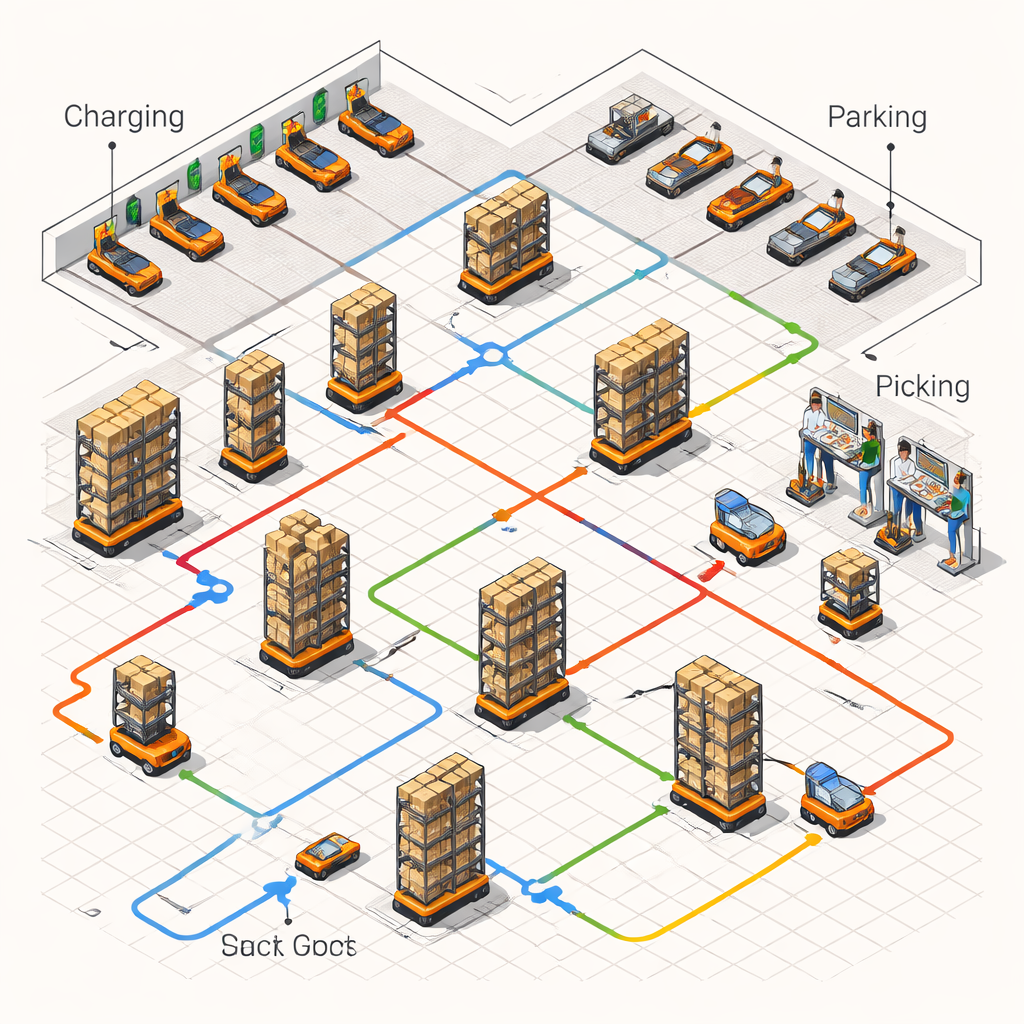
次に、チームは到着時刻連鎖法(ATC-AGV)を導入し、共有経路上の多数のロボットを調整します。DTT-AGVが各区間の所要時間を推定した後、ATC-AGVは各ロボット経路のノード(交差点、曲がり角、受け渡し点)ごとに厳密な到着時刻と出発時刻を割り当てます。共有ノードごとに時間の「チェーン」を構築し、荷重状態や充電中、旋回中といった現在のロボットの状態を考慮しつつ車両間の安全な間隔を確保します。もし新しい計画が二台のAGVを時間的に近接して同一ノードに配置してしまう場合、ATC-AGVは安全余裕を回復するために一台のスケジュールを必要十分なだけずらします。事実上、倉庫の床面グリッドを時間を意識した地図に変え、衝突が発生する前に防ぐ手助けをします。
より滑らかな動きと穏やかな走行の検証
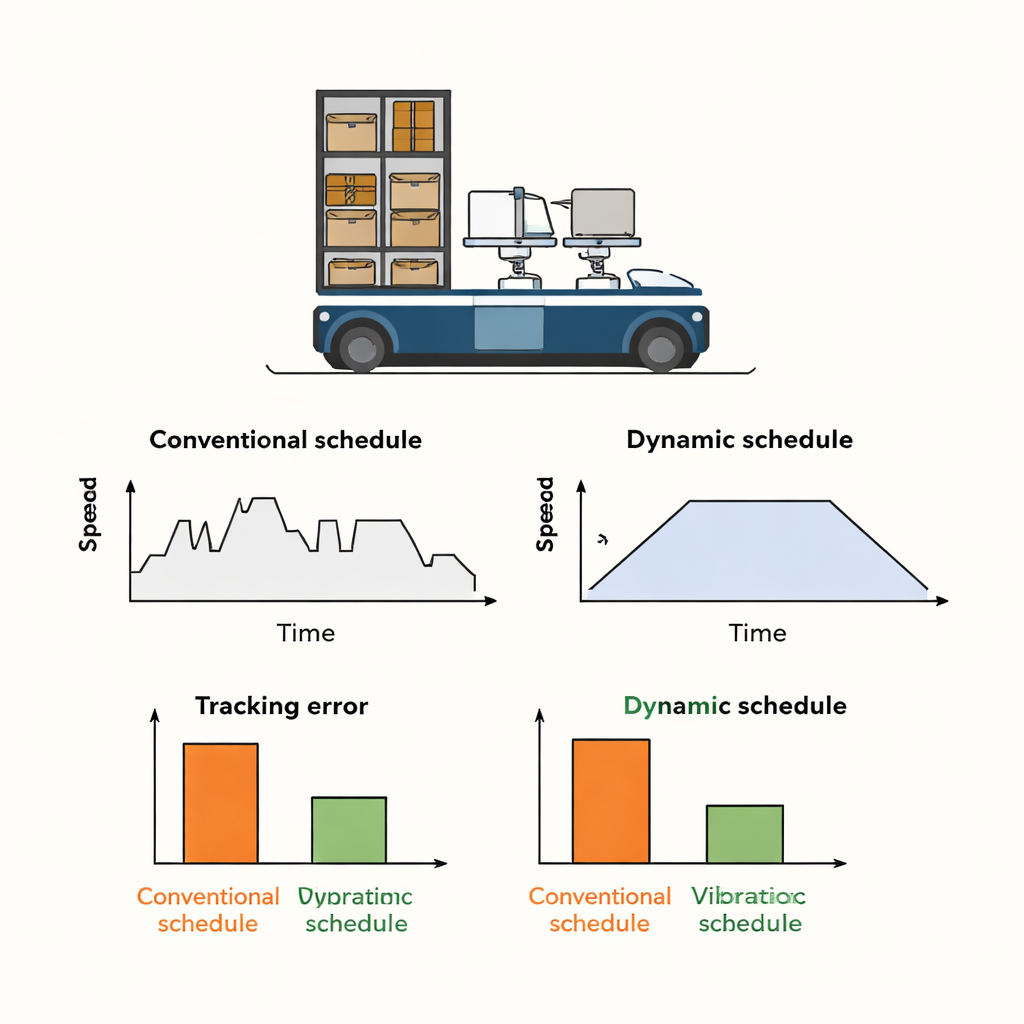
彼らの手法を検証するため、著者らは充電エリア、駐車スペース、棚エリアを含む格子状のクロスドッキング倉庫でAGVをシミュレーションします。従来の、ほぼ一定速度を仮定して詳細な運動段階を無視する手法と比較しました。あるテストでは、ロボットがL字の経路を移動してから90度曲がります。従来のアプローチは角で急激な速度変化を発生させ、実機のロボットはそれを正確に追従できません。その結果、ロボットの目標位置と実際の位置の差といった追従誤差が大きくなり、重要な地点で時間誤差が尖ることがありました。新しいプランナーでは経路が明確な加速、巡航、制動の段階に分割され、シミュレーション上のロボットは目標経路をより正確に追従し、誤差が大幅に小さくなり滑らかな旋回が実現しました。
荷物に優しく、将来を見据えた設計
第二のテスト群は荷重そのものの挙動に注目します。従来のスケジュールを用いると、ロボットの底部に突然の加速度ショックが生じ、それが棚のばね様挙動を刺激して荷物に強い振動をもたらします。一方、動的で荷重を考慮したスケジュールでは、加速度はより狭い範囲に留まり、変化も穏やかです。時間を通して測定すると、荷重のピーク振動と平均振動の両方が大きく低下し、壊れやすい積み重ねられた荷物や不安定な品目にとって重要な効果が得られます。著者らはまた、車輪と床の摩擦のような見落とされがちな要因が推定にどう影響するかを調べ、典型的な倉庫条件下では追加のタイミング誤差がアルゴリズムに組み込まれた安全余裕の範囲内に収まることを確認しました。
実際の倉庫にとっての意味
簡単に言えば、本研究はAGVのスケジューラに対して、制御する機械の実際の運動を尊重するよう教えます。走行時間や優先通行の判断を、ロボットが実際にどれだけ速く加速・減速し、異なる荷重を振動させずに運べるかに基づかせることで、提案フレームワークは経路追従誤差を減らし、荷物の振動を低減し、交差点での衝突リスクを下げます。倉庫事業者やメーカーにとって、これは交通の円滑化、荷扱いの安全性向上、車隊の拡大やレイアウトの複雑化に応じてスケールできる基盤を意味します。
引用: Nguyen, T.P., Nguyen, H., Phan, D.M. et al. Dynamic chain for scheduling of the multi-AGV systems with load-aware motion profiling. Sci Rep 16, 6832 (2026). https://doi.org/10.1038/s41598-026-37083-z
キーワード: 自動誘導車両, 倉庫ロボティクス, 衝突回避スケジューリング, モーションプランニング, スマートロジスティクス