Clear Sky Science · ja
不確かさの存在下での適応型二次連続制御によるクアッドロータのパーチング(壁への着座)
ドローンを壁に貼りつける意味
バッテリーが切れるまでただホバリングするだけでなく、小鳥のように静かに壁に止まり、橋や作物、森の縁を何時間も見守れる小型ドローンを想像してください。本論文は、そのような「パーチング」ドローンが垂直面に接近し、跳ね返らずに接触して安定して張り付き、乱気流や機体挙動の不確かさがあっても耐えられるように制御する新しい方法を示します。本研究は、壊れやすい飛行機を信頼できる省エネルギーの点検ツールに変えるという課題に取り組んでいます。
ホバリングするロボットから壁に張り付く偵察機へ
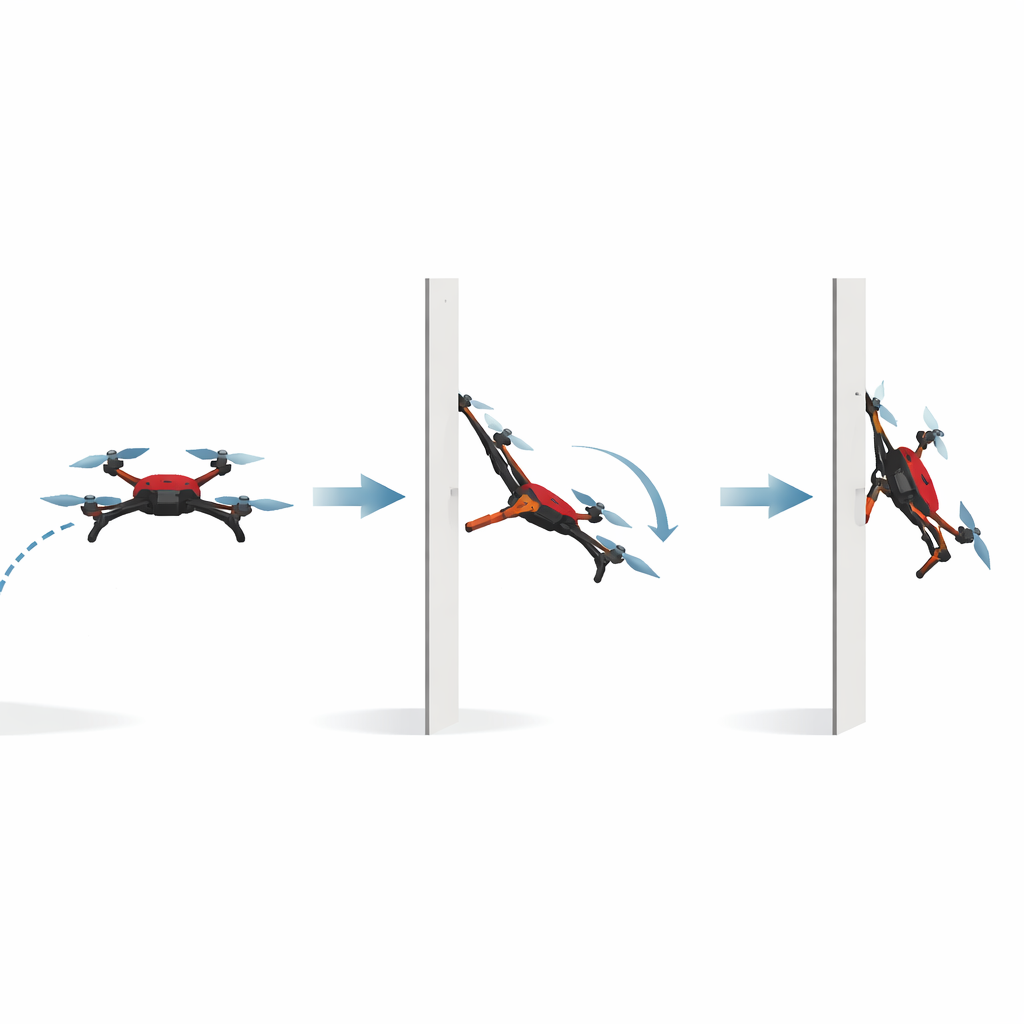
小型の四連ロータドローン(クアッドロータ)は、マッピング、建設点検、野生生物の監視、精密農業などで既に使われています。しかし最大の制約は持続時間です:ホバリングはバッテリーを消費します。壁や柱、橋の下面などにパーチすることで、ドローンは多くのモーターを停止させながらセンサーを所定位置に保ち、長期観測が可能になります。これを安全に行うのは簡単ではありません。短く重要なパーチ動作中、ドローンは壁へ接近して接触し、跳ね返りや滑り、制御喪失を起こさずにノーズダウン姿勢に回転しなければならず、突発的な突風やモデル誤差が運動を乱す可能性があります。
きれいな壁着地の難しさ
著者らは機首に軽い支持アームを備えたクアッドロータを検討しており、それが壁との物理的接点として機能します。自由飛行から接触へ移行する際、機体の位置(横方向、前後、高さ)と姿勢(ロール・ピッチ・ヨー角)は密接に結びついています:姿勢を変えれば推力が運動に変換される様子が変わり、壁からの突発的な反力が機体をねじることもあります。さらに、壁近傍の空力相互作用、組み立て誤差、センサノイズなどの実世界の影響が未知の擾乱として作用します。既存のロバスト制御手法は安定化を図れますが、多くはモーター指令に高周波の“チャタリング”を生じさせ、機器の摩耗を招き、誤差が徐々にしか縮まらない(予測できる短時間で収束しない)という問題があります。
バランスと適応のより賢い方法
これらの問題を克服するために、本論文は適応型二次連続制御(ASOCC)スキームを導入します。簡単に言えば、制御器は単に目標からの偏差の大きさを見るだけでなく、偏差がどれだけ速く変化しているかも観察し、その両方が有限時間でゼロに収束するように制御指令を形成します。組み込まれた擾乱オブザーバはリアルタイムの“ノイズリスナー”のように振る舞い、未知の力やモデル不一致の総効果を推定して制御則にフィードバックします。重要なのは、制御器の反応の強さを決めるゲインが事前に固定されるのではなく、これらの推定に基づいて動的に調整される点です。制御信号が急激に切り替わるのではなく滑らかに変化するため、チャタリングを大幅に低減しつつ高いロバスト性を維持できます。
新しい制御の試験
研究者らはまずオブザーバとコントローラの組合せについて数学的解析を行い、エネルギー様のライアプノフ関数を用いて、境界付きの擾乱にもかかわらず全ての運動誤差が有限時間でゼロに収束することを証明しました。次に、ソフトウェア上で過酷なパーチシナリオをシミュレートし、風に似た力、ランダムな計測ノイズ、物理パラメータの意図的な誤差をモデルに与えました。これらの試験では、ASOCCはステージング、接近、パーチの三段階を通して機体を誘導し、位置・姿勢誤差を小さく保ちつつ制御入力を滑らかにしました。一般的なスライディングモード制御やモデルベース制御などの高度な代替手法と比較して、主要な追従誤差指標を約35~55%削減しました。
シミュレーションから実機の壁着座へ
シミュレーションを越えて、チームは市販のフライトボードと3Dプリントのフレーム(前方アーム付き)を用いて小型のパーチングクアッドロータを製作しました。屋内実験では、ドローンは自律的に傾斜した壁に向かって飛行し、高度約1メートルでノーズダウンして接触し、そのまま付着しました。時系列データは高度、水平位置、ピッチ角が望ましい軌跡に密に従っており、センサノイズによる小さな揺らぎしかありません。低コストのハードウェア、通信遅延、アクチュエータ制限があるにもかかわらず、衝突後に跳ね返ったり発振したりすることはなく、ASOCCが実際の飛行の乱雑さに対処できることを示しました。
将来の飛行点検に対する意義
専門外の方にとっての重要な結論は明快です:本研究は小型ドローンが不完全な条件下でも垂直面に確実に張り付き続けられる制御戦略を提供します。滑らかでありながら強力に修正する制御と適応型擾乱オブザーバを組み合わせることで、多くのロバスト制御に見られる振動やハードウェアへの負荷を伴わずに迅速で精密なパーチが可能になります。これにより、より軽いバッテリー、より単純なプラットフォーム、安全性の向上を伴う長時間の空中監視が現実味を帯び、インフラや作物、自然環境を静かに見守る自律的な“壁に張り付く”ロボットの群れへの道が開かれます。
引用: Gupta, S., Nandanwar, A., Dhar, N.K. et al. Perching of quadrotor using adaptive second-order continuous control in the presence of uncertainties. Sci Rep 16, 8578 (2026). https://doi.org/10.1038/s41598-026-36857-9
キーワード: クアッドロータのパーチング, 適応制御, ドローン検査, 擾乱オブザーバ, 空中ロボティクス