Clear Sky Science · ja
ロボット収穫における赤唐辛子房の高精度検出のための軽量YOLOベースモデル
辛味を収穫するための賢いロボット
四川山椒(赤い殻を持つ小さな実)は、四川料理に特徴的なビリビリする辛味を与える一方で、収穫は意外に難しい作業です。果実は密集して刺のある房で成りやすく、簡単に傷つきますし、手作業での収穫は遅く季節限定の重労働になります。本研究は「Red-YOLO」と名付けた新しいコンピュータビジョンシステムを紹介します。これは小型の移動ロボットが実際の果樹園で、果実が重なったり葉の裏に隠れたりしている場合でも、繊細な唐辛子の房を迅速かつ正確に検出できるよう設計されています。
なぜ唐辛子の収穫は難しいのか
リンゴのような大きく滑らかな果実とは異なり、赤唐辛子は多数の小さな実がトゲのある枝に密に集まって成長します。房は木ごとに大きく見た目が異なり、緊密でコンパクトなものもあれば、散在してゆるいものもあり、枝葉や変化する光などの背景が混在します。ロボットにとって、ひとつの房がどこで終わり別の房が始まるのか、また実がどれほど密に詰まっているかを把握することは不可欠です。把持力や摘み取りツールのサイズは房の密度に応じて変える必要があり、さもないと脆い油胞が破れて品質や価値が低下します。
実際の画像ライブラリの構築
この作物向けの公開画像コレクションが存在しなかったため、研究者らはまず自前のデータセットを作成しました。四川省漢源県の実際の果樹園で2つの生育シーズンにわたり、消費者向けスマートフォンで果樹を撮影し、異なる太陽角度や時間帯に960枚の高解像度正方形画像を収集しました。各画像は手作業で丁寧にラベリングされ、コンパクトな房と散在する房を区別しました。多様性を学習させるために、多くの画像をデジタルで変換し、明るさやコントラストを調整、左右反転、一部の格子歪みや回転を加えました。これにより訓練用データは4300枚以上に拡張され、最終システムの性能を正直に評価するために手を加えていない少数の画像は別に確保されました。
より軽く、より鋭いコンピュータビジョンモデル
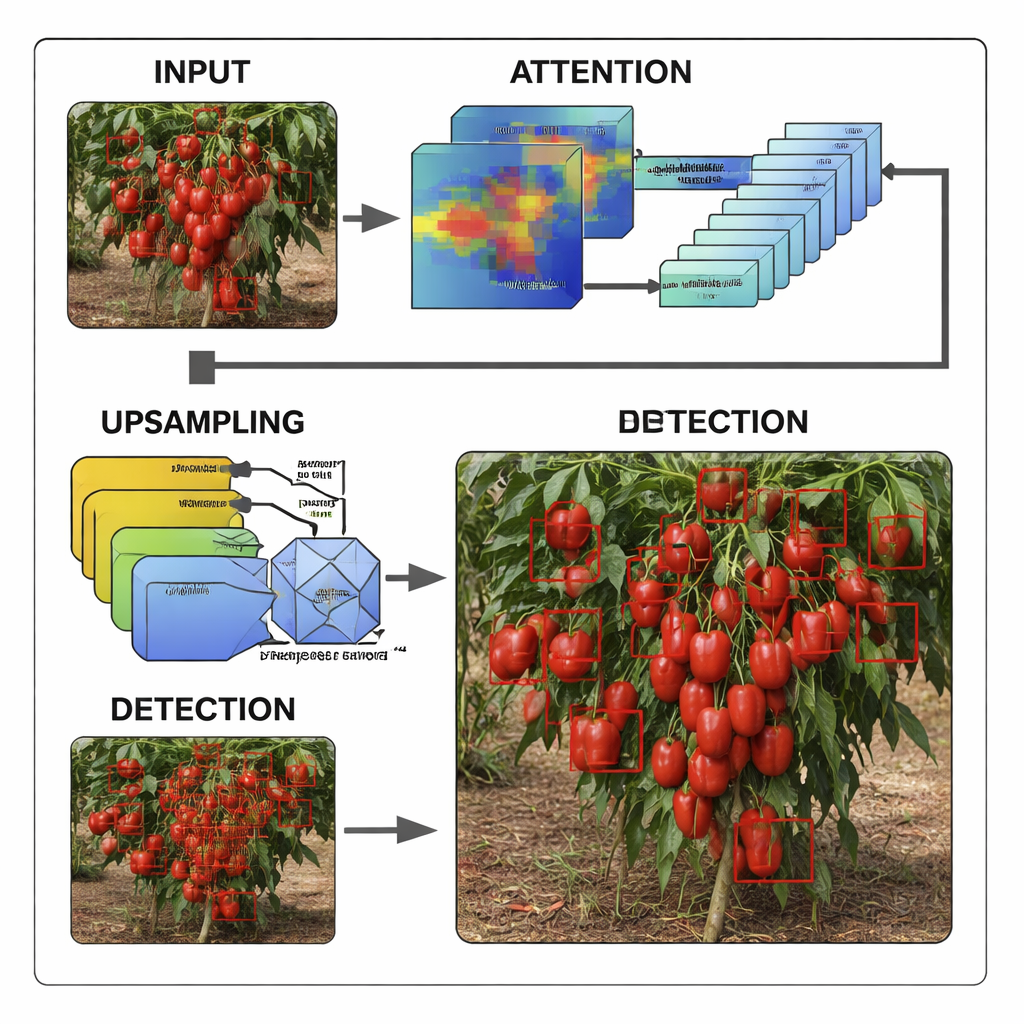
システムの中心にはYOLOv8があります。これは「you only look once」の物体検出モデルで、複数段階ではなく単一の高速パスで物体を見つけます。研究チームはこのモデルの非常に小さいバージョンを調整し、赤唐辛子の房検出に特化して再設計しました。注意モジュールを追加して、ネットワークが空、枝、遠景の木などの雑音を無視して果実を含みやすいチャネルや領域に焦点を当てるように教え込みました。ネットワークの一部を再設計して情報をより効率的に再利用し、不要な計算を削減しました。また単純なリサイズ処理をより賢いアップサンプリングブロックに置き換え、重なり合う唐辛子の細部や境界を再構築して、密集した房の始まりと終わりを識別しやすくしています。
小型ロボット向けの高速かつ高精度な視覚
これらの変更が有益かどうかを確かめるため、研究者らはRed-YOLOを従来の重い検出システムや各種の最新軽量YOLO変種と比較しました。従来の多段階モデルは強力ですが、小型の果樹園ロボットには遅くリソースを消費しすぎました。いくつかの新しいYOLOバージョンは改善を示しましたが、小さく部分的に隠れた房や雑然とした背景には苦戦し、果実を見落としたり葉を唐辛子と誤認したりすることがありました。Red-YOLOはより良いバランスを実現し、比較対象のモデルよりも全体的な精度と再現率が高く、モデルサイズを300万パラメータ未満に抑え、組み込みプロセッサで扱える計算負荷に留めました。さまざまな果樹園のシーンでのテストでは、果実が小さい、陰になっている、または重なり合っている場合でもRed-YOLOは一貫して房を検出しました。
研究室のモデルから果樹園の助っ人へ
非専門家にとっての重要な成果は実用面です。本研究は、コンパクトで慎重に調整された視覚システムが小型の収穫ロボットに現場で信頼できる「目」を提供できることを示しています。Red-YOLOを搭載したロボットは、房がコンパクトか散在かを自動的に判断して、摘み取り前に把持器の大きさや力を調節でき、損傷を減らし労力を節約できます。本研究は一つの品種と一地域に焦点を当てていますが、同じアプローチ—特化したデータセットを構築し、軽量な検出モデルを洗練する—は他の特殊作物にも応用可能です。これらの視覚システムがより堅牢に広く導入されれば、収穫をより速く、安全に、均質に行えるようになり、世界の好まれる風味を支える唐辛子の安定供給に寄与するでしょう。
引用: Zhao, H., He, J., Li, Y. et al. A lightweight YOLO-based model for accurate detection of red pepper clusters in robotic harvesting. Sci Rep 16, 5879 (2026). https://doi.org/10.1038/s41598-026-36671-3
キーワード: ロボット収穫, 唐辛子検出, コンピュータビジョン, 軽量YOLO, スマート農業