Clear Sky Science · ja
病棟での経路最適化により自律走行を強化したスマート患者ケアロボットの開発
看護師を置き換えるのではなく支えるロボット
世界中の病院は圧力にさらされています:高齢患者の増加、慢性疾患の増加、そして限界まで負担のかかったスタッフ。本研究は、看護を代替するのではなく、病棟での繰り返しの監視や夜間巡回を静かに担うことを目的としたスマート患者ケアロボットについて説明します。自律的に安全かつ確実に移動できることで、このロボットは転倒や急な発熱といった緊急事態を看護師がより早く発見する手助けになり、作業負荷の軽減や混雑した廊下や狭い出入口での事故リスク低減に寄与します。
病院の廊下がロボットにとって難しい理由
一見すると病院の廊下は単純に見えます:直線、きれいな床、規則的な扉。しかしロボットにとってはまったく別物です。ベッドやカート、壁、とりわけ狭いドア枠は、わずかな誤差でも衝突につながるタイトな空間を生み出します。既存の多くの病院用ロボットは、こうした状況に対処するために多数のセンサーや複雑なハードウェアを頼りにしています。本研究チームは別の道を選びました:主に一つの主要センサー、周囲の距離を測る2次元レーザースキャナと、より賢い経路計画の組み合わせで安全に移動できるロボットを目指したのです。

看護師のもう一つの目を作る
研究者たちは市販の台車型走行基盤の上にスマート患者ケアロボット(SPCR)を構築しました。本体には、転倒の検出や患者に触れることなくバイタルの取得を行うための3Dカメラを搭載し、周囲を全方位で連続的にスキャンする2Dレーザーセンサーを上部に配置しました。内部には組み込みコンピュータ、バッテリー、モータ制御装置、通信機器が搭載され、制御アプリとの通信や自らの走行判断を行います。ロボットは全方向移動が可能で、患者を観察するためのカメラアームを屈曲させることができ、実際の病院環境で数時間稼働するよう設計されています。
ハードを増やす代わりに賢い地図を
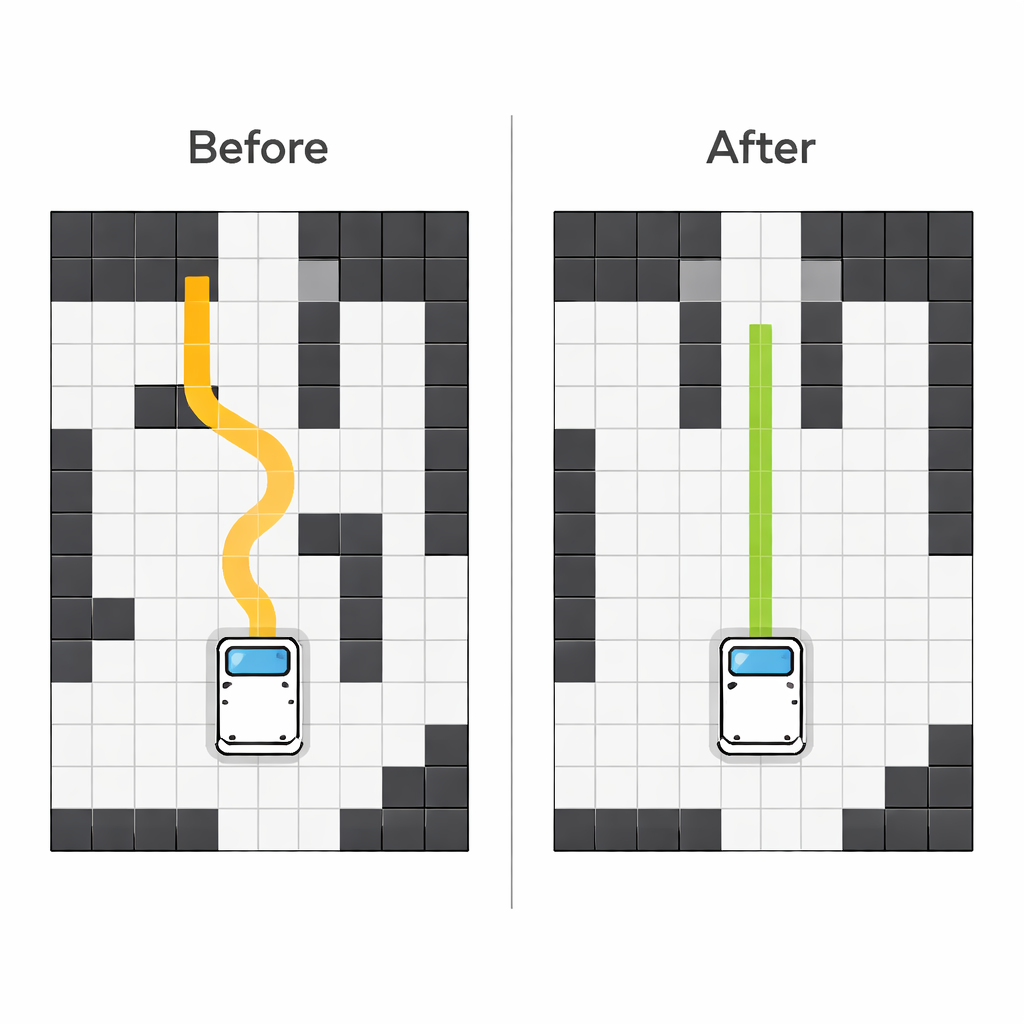
ナビゲーションのためには、ロボットが進行可能な場所と進めない場所を示す地図がまず必要です。チームは病院廊下の精密図面を出発点とし、それをグリッド形式の地図に変換しました。各小さなマス目は通行可能領域、壁、障害物としてラベル付けされます。地図をそのまま使う代わりに、彼らは実際よりも慎重な形に地図を整形しました。「仮想障害領域」と呼ぶ余分な遮断領域を導入し、ドアの縁や狭い角などリスクのある箇所からロボットをやんわりと遠ざけます。改良版D* Liteアルゴリズムをベースにした経路計画ソフトウェアは、この安全側に寄せた地図上で急な旋回を避け、狭い通路の中心寄りを通るような経路を探索します。
実際の病棟でロボットを試す
システムは実際の病院廊下でテストされ、廊下、扉、障害物の組み合わせが異なる3つの区画に分割されました。ロボットはチェックポイント間を移動し、標準的な幅90センチメートルの扉を通過し、壁や固定物を避ける必要がありました。ロボット自体の幅は約76センチで、扉を通過する際は両側にわずか数センチのクリアランスしかなく、多くのロボットが苦戦する条件でした。グリッド地図の調整前後で性能を比較したところ、物に接触せずに経路を完了する成功率はすべての区画で30%以上向上し、より滑らかな経路と不要な操作の減少が見られました。
将来の患者ケアにとっての意義
専門外の読者にとっての要点はシンプルです:ロボットにますます多くのセンサーを搭載する代わりに、綿密なデジタル地図設計と賢い経路計画によって、病院用ロボットはより安全で実用的になり得るということです。狭い扉を夜間に確実に通り抜け、効率的な経路に従い、患者の基本的な異常を静かにチェックできるロボットは、看護師が家族への配慮、複雑な判断、緊急対応といった人間的ケアに専念する余地を生みます。著者らは本研究を基盤と見なし、今後はより多くのセンサーや充実した患者モニタリング機能を追加して、実際の病院環境で安全に動作する24時間対応の信頼できるロボットアシスタントを目指すと述べています。
引用: Kim, B., Hyun, J., Yang, B. et al. Development of smart patient care robot with enhanced autonomous navigation through path optimization in hospital wards. Sci Rep 16, 6026 (2026). https://doi.org/10.1038/s41598-026-36664-2
キーワード: 病院ロボット, 自律走行, 患者モニタリング, LiDARマッピング, 経路計画