Clear Sky Science · ja
水中無人自律潜航艇のための拡張現実と強化学習を組み合わせた新しい通信フレームワーク
波間に潜む、より賢いロボットたち
海底では、自律型水中車両が気候研究、インフラ点検、捜索救助のための目と耳の役割を担っています。しかし、これらの潜水ロボットは基本的な問題に悩まされています。信号が遅く、ノイズが多く、エネルギーが限られる過酷な環境下で、はっきりと通信し、判断することが難しいのです。本論文は、拡張現実・仮想現実と、強化学習と呼ばれる人工知能の手法を組み合わせることで、水中ロボットの通信、物体検出、セキュリティを支援する新しい方法を提示します。
なぜ水中通信はこれほど難しいのか
水中でデータを送ることは、空気中よりはるかに難しいです。Wi‑Fiや5Gを支える電波は海水にすぐ吸収されます。音響(音波)信号はより遠くまで届きますが、データレートは非常に低く、遅延、反響、歪みが生じます。磁場誘導は数十メートルの範囲に限られます。既存の水中ロボットの制御システムはこれらの通信チャネルを個別に扱い、航行やセンシングに固定ルールを使うことが多く、環境変化への適応が遅く、バッテリーを無駄にし、盗聴や攻撃に対して脆弱になりがちです。
より良い本能を鍛える仮想の海 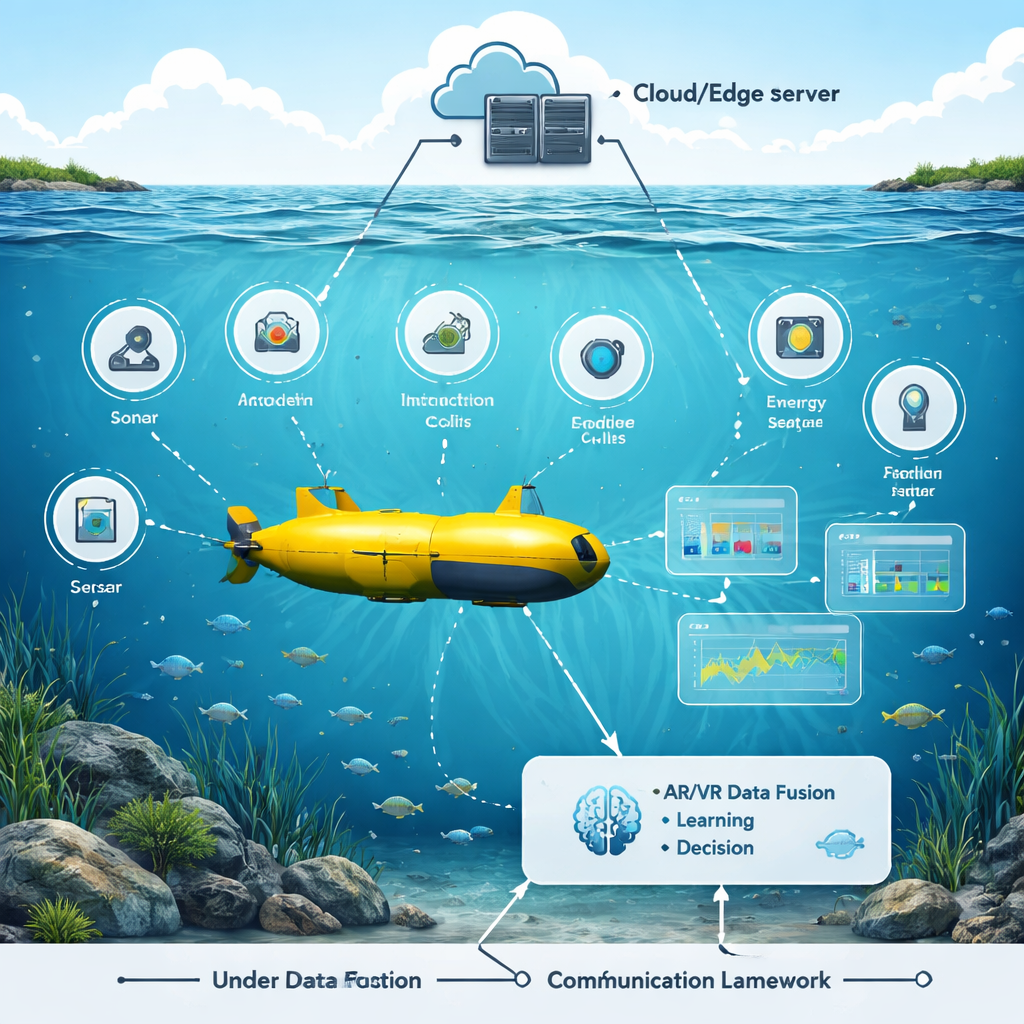
Figure 1.
著者らは、魚や岩、船、ブイが動き、現実的なノイズと信号損失を再現する賑やかな水中世界を再現する拡張・仮想現実のテストベッドを構築しました。複数のセンサー(ソナー、カメラ、音響モデム、エネルギーメーター、位置トラッカー)を備えた模擬の水中車両がこの環境を巡航します。仮想シーンでは研究者がオブジェクトの位置、水条件、センサー設定をスライドで変更でき、ロボットの反応を即座に確認できます。このAR/VR層は見た目のためだけではなく、生のセンサーデータを統合した3D像にまとめ、AIシステムが理解し行動しやすくします。
経験から学ぶロボットの教育
フレームワークの中心には、著者がAARLSS(Adaptive Augmented Reality and Reinforcement Learning Scheduling Strategy)と呼ぶAI戦略があります。固定された手順に従う代わりに、ロボットは仮想の海で試行錯誤によって学習します。常に、ロボットは融合されたセンサー状態を観察し、行動(進路変更、センサーのサンプリング率調整、短距離・長距離通信の切り替えなど)を選び、報酬を受け取ります。その報酬は、エネルギー節約、遅延の低減、セキュリティリスクの軽減、計算・ネットワークリソースの節約という四つの目標をバランスさせます。深層Q学習ネットワークは様々な決定の期待価値を保持・更新し、リプレイメモリに保存された過去の経験のミニバッチを使って、最近の状況と過去の状況の両方から学べるようにします。
スマートなスケジューリングからより安全な任務へ 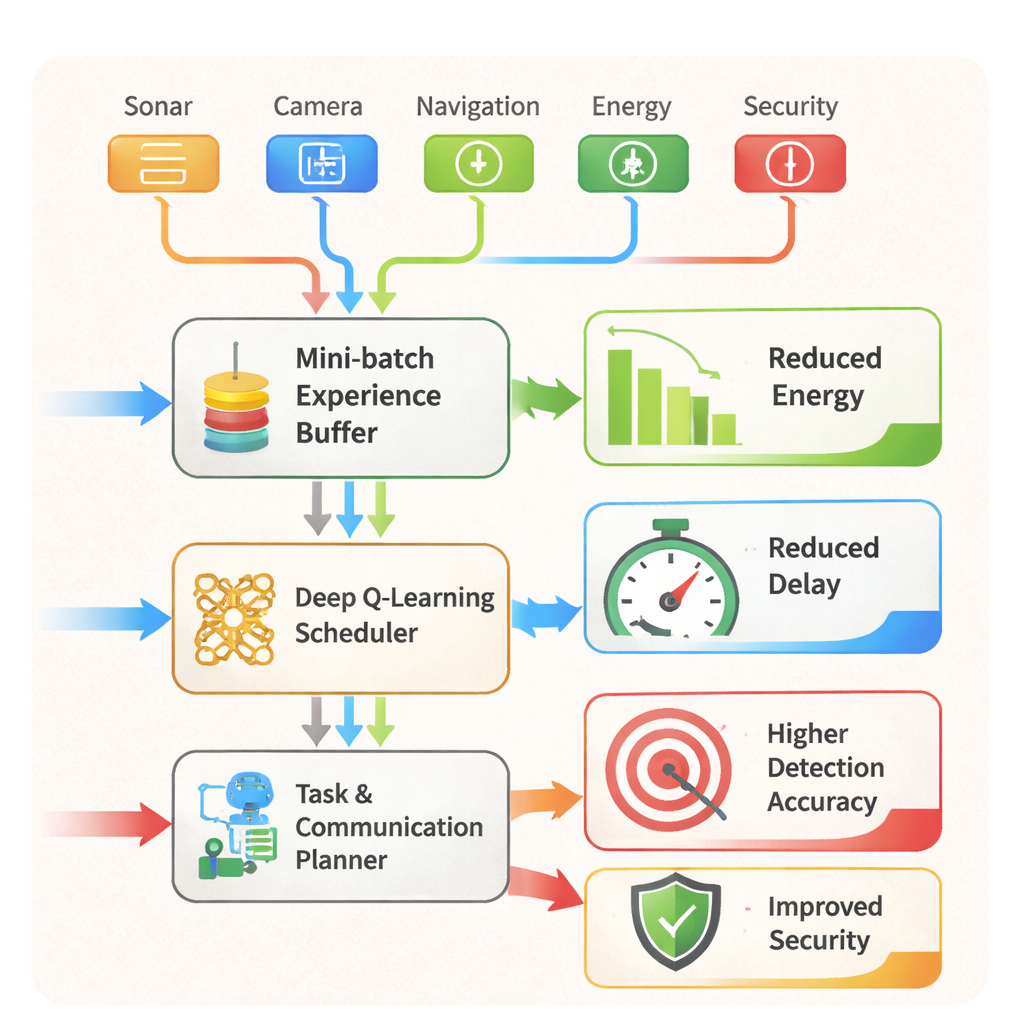
Figure 2.
AARLSSはリアルタイムのスケジューラとしても機能します。どのタスク(航行、物体検出、通信、セキュリティチェック)をいつどこで動かすべきか、データをロボット内で処理するかエッジサーバにオフロードするか遅延させるかを決定します。これに加えて、組み込みの侵入検知システムがセンサーやネットワークデータのパターンを継続的にスキャンし、攻撃や故障を示す異常を検出すると、危険なリンクの遮断やローカル処理への強制などの保護措置をトリガーできます。AR/VRシミュレータ内でのテストでは、本フレームワークは複数の既存の強化学習手法を上回りました。水中車両のエネルギー使用量を約20%削減し、通信とタスクの遅延を約18〜20%短縮し、複雑な機動や乱雑なシーンでも物体検出の精度を約97〜98%に高めました。
現実の海が意味すること
専門外の読者にとっての要点は、この研究がより自律的で効率的かつ信頼できる水中ロボットへの道筋を示していることです。豊かな仮想の海で訓練し、エネルギー、時間、精度、セキュリティを同時に天秤にかけて学習することで、AARLSSはロボットにいつ発信し、いつ受信し、いつ省電力のために沈黙するかを選ばせると同時に、周囲に注意を払いデータを守ることを可能にします。これらの結果は開放海域ではなく高度なシミュレータから得られたものですが、将来的には人手の監督を減らしてより長く安全でデータ豊かな任務をこなす水中ロボット群が、海洋科学から洋上産業の点検まで幅広く改善をもたらすことが示唆されます。
引用: Lakhan, A., Mohammed, M.A., Ghani, M.K.A. et al. A novel augmented reality and reinforcement learning empowered communication framework for underwater unmanned autonomous vehicle. Sci Rep 16, 6241 (2026). https://doi.org/10.1038/s41598-026-36647-3
キーワード: 水中ロボティクス, 自律型水中車両, 強化学習, 拡張現実, 水中通信