Clear Sky Science · ja
UAV画像におけるリアルタイム小物体検出のための協調型マルチアテンションネットワーク
上空から小さなディテールを見つけることが重要な理由
ドローンが交通監視、災害対応、セキュリティの一般的なツールになるにつれ、上空から見た非常に小さな物体(車、自転車、人など)を確実に検出する必要性が高まっています。こうした空撮画像では対象は数ピクセルにしかならず、影や反射、雑多な背景に埋もれやすいです。本論文は、こうしたドローン画像中の小さな物体をリアルタイムで、かつ高精度に検出するために設計された新しいコンピュータビジョンシステム、Collaborative Multi-Attention Network(CMA-Net)を紹介します。
高所から小さなものを識別する際の課題
ドローン画像における小物体検出は、通常の街頭写真より難易度が高いです。ドローンは高高度から多様な角度で撮影するため、車両や人は非常に小さくぼやけやすく、照明も急速に変化します。従来の2段階検出器は高精度なことが多い一方で、演算資源や通信帯域が限られた飛行プラットフォームではリアルタイム性が不足しがちです。高速な1段階手法はリアルタイムで動作しますが、処理が層を重ねるごとに詳細が失われるため小さな対象を見逃しやすくなります。著者らは、小物体検出を改善するにはスケール間の情報を賢く統合し、画像のより有益な部分に計算上の注意を集中させる方法が必要だと論じています。
より賢い特徴ラダーの構築
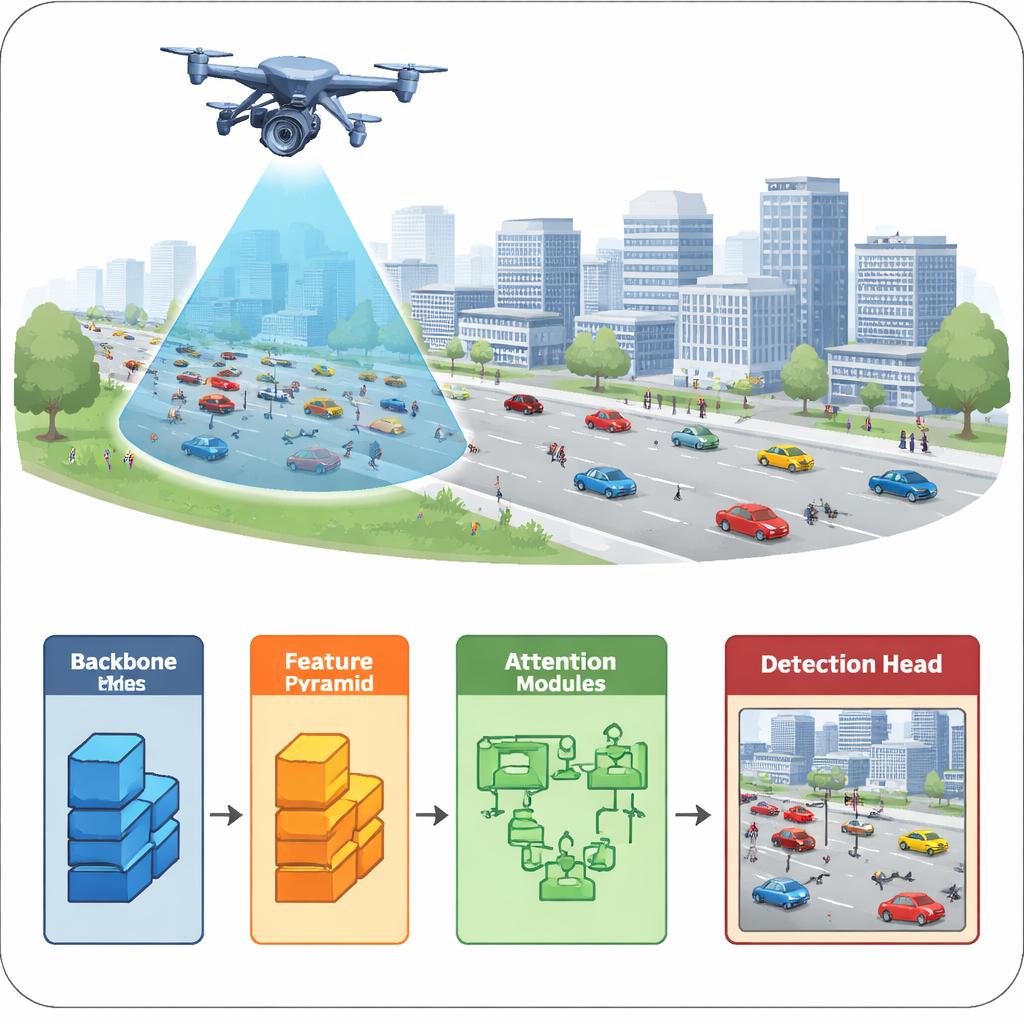
CMA-Netは広く使われる特徴抽出バックボーンであるResNet-50を出発点とし、そこにEfficient Bi-directional Feature Pyramid Network(E-BiFPN)を追加します。この構造は異なる解像度の特徴マップからなる「ラダー」を構築し、初期層の細かなディテールと深い層のより抽象的な文脈を混合できるようにします。従来設計と異なり、E-BiFPNは不要な高レベル層を削り、計算を削減するために部分畳み込みを用いる軽量な処理ブロックを導入しています。さらに、重み付き融合スキームが各スケールで浅い特徴と深い特徴のどちらをどれだけ信頼するかを学習するため、微細な車や歩行者に関する壊れやすい情報を強調しつつ背景ノイズを抑制できます。
ネットワークに注目すべき領域を教える
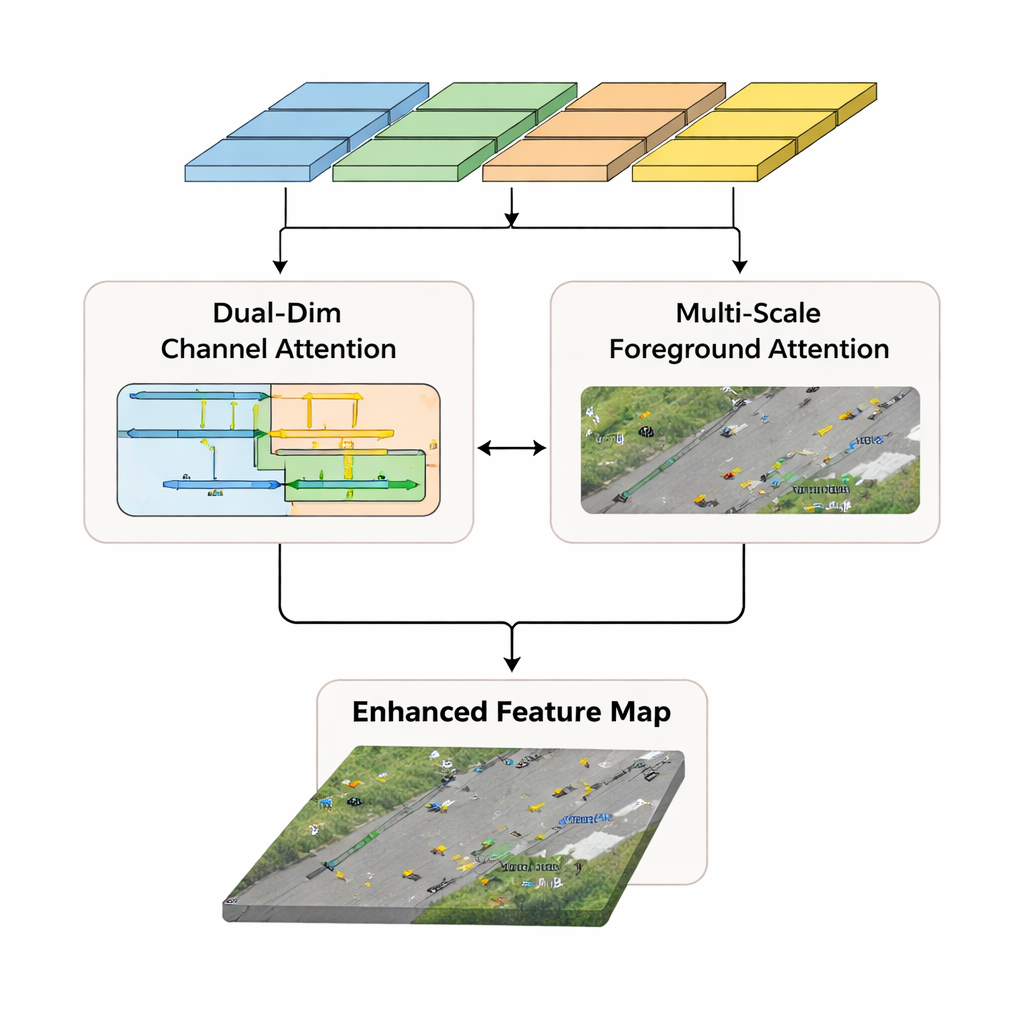
特徴の再配置に加え、CMA-Netは人間がシーンの関連部分に注目する様子を模したアテンション機構を用います。Dual-Dimensional Channel Attention(DDCA)モジュールは、全てを単一のグローバル要約に圧縮する代わりに、画像の幅方向と高さ方向に沿って特徴を別々に解析します。この設計は水平方向・垂直方向の長距離パターンを捉えるのに役立ち、小さな物体が複雑な背景に溶け込む場合でも位置に関する手掛かりを保持します。並列して動作するMulti-Scale Foreground Attention(MSFA)モジュールは、深い層の大きく容易に識別できる物体と浅い層の小さな物体を結びつけます。3つのスケールから情報をサンプリング・融合することで、MSFAは車両が存在しやすい前景領域を強調し、混乱を招く背景テクスチャを抑えることを学習します。
強化された特徴から高速な判断へ
DDCAとMSFAブランチの出力は、小物体検出に適した豊かな特徴マップとして統合され、「アンカーフリー」検出ヘッドに渡されます。このヘッドは事前に定められた密なボックスグリッドに依存する代わりに、物体のカテゴリと位置を直接予測するため、計算が単純化され学習が柔軟になります。著者らは、混雑した道路や多様な天候、昼夜変化を含む2つの厳しい公開ドローンデータセット(UAVDTとStanford Drone)でCMA-Netを評価しました。CMA-Netはそれぞれ67.2%と62.0%の精度を達成し、かつ毎秒64フレームで動作したため、動画をリアルタイムで処理しながらYOLO系の人気検出器やより複雑なトランスフォーマーベースモデルの多くを上回りました。
現実のドローン運用にとっての意義
専門外の方への要点は、CMA-Netがドローンの小さく見えにくい物体を見逃しにくくしながら処理速度を落とさない点にあります。複数スケールにわたる情報を慎重に融合し、チャネル間および前景と背景の間でネットワークの注意を導くことで、小さな車両や人物が見落とされるのを防ぎます。この精度と速度の両立は、スマートな交通監視、群衆観察、緊急対応など、見落としや反応遅延が重大な結果を招きうる実用的な用途において有望です。
引用: Yang, J., Yue, X. & Wu, L. A collaborative multi-attention network for real-time small object detection in UAV imagery. Sci Rep 16, 5852 (2026). https://doi.org/10.1038/s41598-026-36440-2
キーワード: ドローンビジョン, 小物体検出, リアルタイム監視, アテンションネットワーク, 交通監視