Clear Sky Science · ja
動的環境下の能動的意味論的ビジュアルSLAMのための相互情報量に基づく階層的NBV決定
先を見越して考えられるロボット
ロボットが工場から家庭、病院、オフィスへと進出するにつれ、人やほかの動く物体がいる空間を移動する必要が出てきます。本稿は、周囲がじっとしていない状況でも信頼できる地図を作成できるよう、どこを見てどう動くかを「先読み」する新しい方法を提示します。この研究は、安全なサービスロボットや賢い配達ロボット、空の廊下ではなく人と空間を共有する将来の家庭用アシスタントに関心がある人にとって重要です。
なぜ動く人はロボットを困らせるのか
多くのロボットは、カメラを使って同時に地図を作り自位置を推定するビジュアルSLAMという手法で自律移動します。静止した環境ではうまく機能しますが、人が歩いてきて視界を遮ったり物を持ち運んだりすると急速に破綻します。一つの一般的な対策は「意味論的」な視覚を使い、人や車、椅子を認識して地図作成時に無視することです。しかし、これが能動的に自分で経路を選ぶロボットには新たな問題を生みます。視覚情報を捨てすぎると、位置を見失ってしまう可能性があるからです。カメラの視野が狭いことも状況を悪化させます。近くを通る一人の人間が、ロボットにとって有用な風景の大部分を隠してしまうことがあるためです。
次にどこを見るかを選ぶための二層戦略
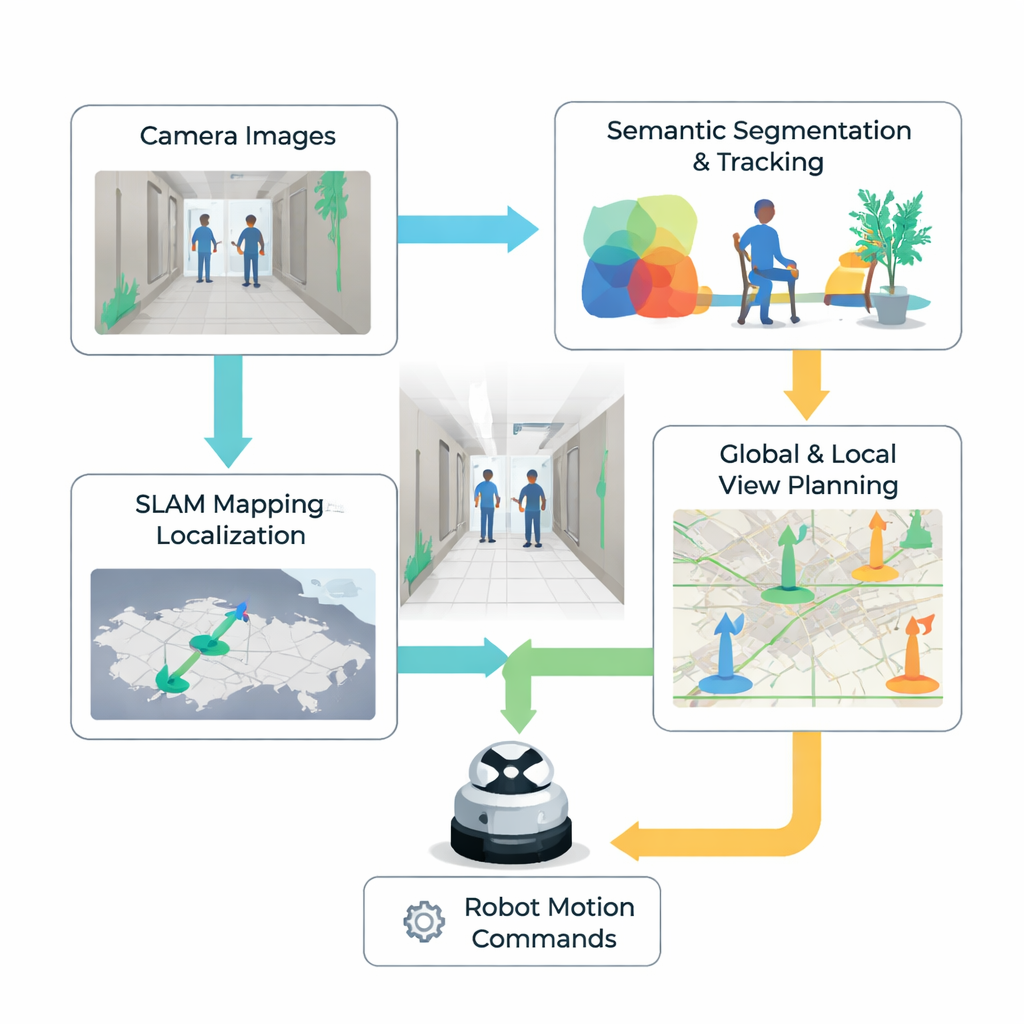
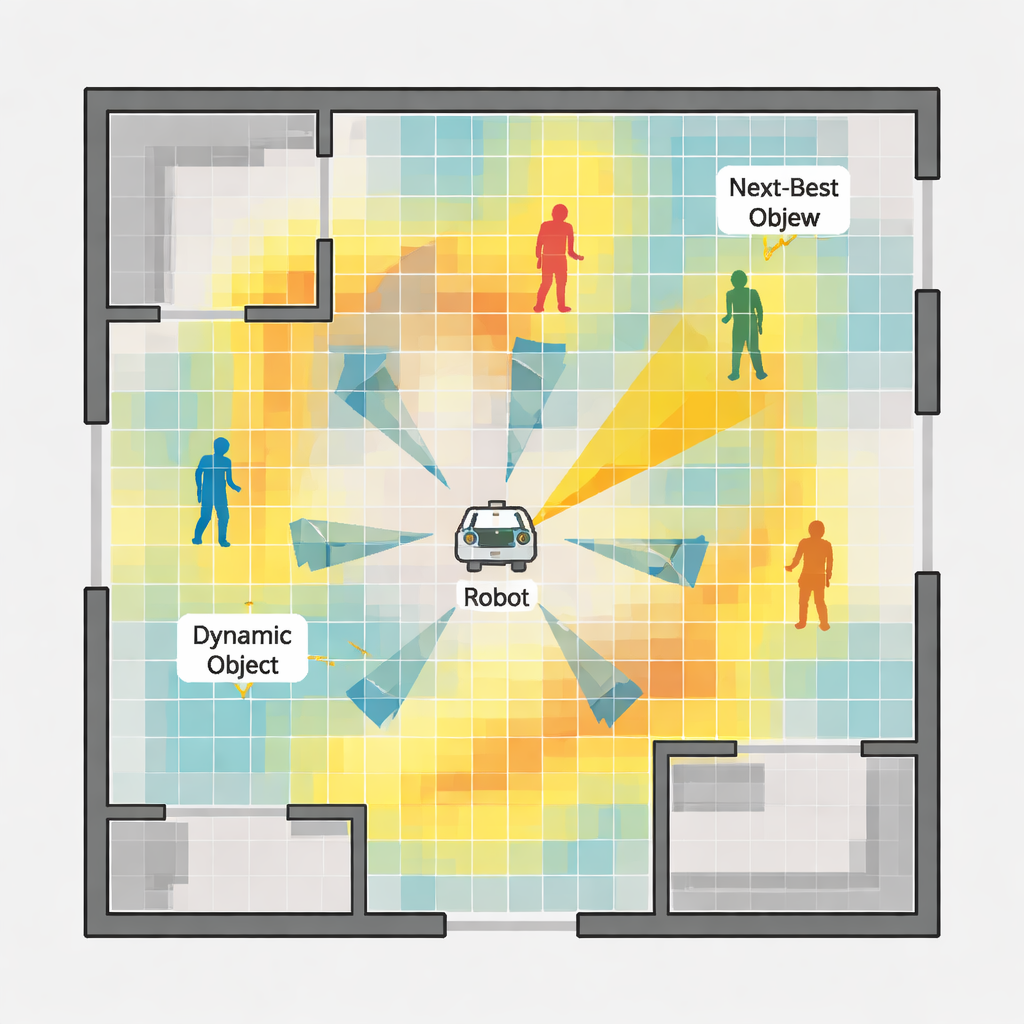
著者らは、ロボットがより情報に基づいて次の視点を決められるようにする階層的決定システムを提案します。高位レベルでは、ロボットは自由領域・占有領域・未知領域を表す鳥瞰グリッドマップを保持します。情報理論から借用した概念で、それぞれの遠隔視点がどれだけこのマップの不確実性を減らすかを見積もり、評価します。ロボットは大きな未探索領域を明らかにできる地点を好みますが、移動距離やカメラの回転量も考慮します。有望な領域が選ばれると、低位レベルのプロセスが引き継ぎ、その近傍で実際に狭いカメラ視野で十分な詳細を得るために、どのように動きどの方向を向くかを微調整します。
安定しているものを見つけ、不安定なものを避ける
局所的な意思決定プロセスの中心には、各カメラ画像から構築される「特徴確率マップ」があります。まず、システムは時間を経ても安定している可能性が高く、運動追跡に有用な視覚的ランドマーク(角やパターン)を検出します。次に、現代的な物体検出器を用いて人などの移動しうる物体を検出し、フレーム間で追跡します。これらの物体の動きを解析することで、単に現在の位置を推定するだけでなく、近い将来どこにいる可能性が高いかも見積もります。これら二つの情報源は画像上のヒートマップに融合されます:明るい領域は信頼できるランドマークを見る確率が高いことを示し、暗い領域は特徴が乏しいか移動物体に覆われやすい場所を示します。ロボットはこのマップを使って、左に曲がる、右に曲がる、前進するのどの小さな動きが次に最も明瞭で安定した視界を与えるかを判断します。
仮想世界と現実世界でのテスト
研究者らは、異なる大きさと複雑さを持つ2つの屋内シミュレーション空間(いずれもさまよう仮想歩行者で満たされた)と、現実の屋内環境を走行する実機ロボットで手法を検証しました。彼らは、主に空間のカバーや移動距離の短縮を目的とした既存の探索戦略と比較しました。シミュレーションでは、新しいシステムは地図の歪みが少なく、探索にかかる時間はほぼ同等か短いままで位置推定精度が向上しました。また、位置を見失う確率や移動する人に過度に近づくリスクも低減しました。実機実験では、市販のロボット用コンピュータ上でリアルタイムに動作し、研究室外での展開が実用的であることを確認しました。
日常のロボットにとっての意味
平たく言えば、この研究は人がいるときにロボットがどこを見てどこへ行くかを選り好みする方法を教えます。シーン理解、動作予測、情報利得の指標を組み合わせることで、ロボットは単に最も近い未探索コーナーへ向かうのではなく、有益で安全な視点へと自律的に誘導できます。これにより内部地図の信頼性が高まり、動きの予測可能性も向上します。どちらも、人と混雑した空間を共有するロボットにとって重要な要素です。カメラを塞ぐような突然の大群衆など、依然として課題は残りますが、本手法は現実世界の混沌とした動的環境を優雅に扱う家庭用・サービス用ロボットに向けた一歩を示しています。
引用: Yang, Z., Sang, A.W.Y., Muthugala, M.A.V.J. et al. Mutual information-based hierarchical NBV decision for active semantic visual SLAM under dynamic environments. Sci Rep 16, 5847 (2026). https://doi.org/10.1038/s41598-026-36259-x
キーワード: 能動SLAM, ロボットナビゲーション, 動的環境, セマンティックマッピング, 次の最良視点