Clear Sky Science · ja
航空画像における小物体検出のための段間エッジ情報融合ネットワーク
上空から小さな詳細を見つけることが重要な理由
交通監視や災害対応、作物管理など、ますます多くの領域でドローンが上空から世界を監視しています。しかし、こうした航空画像で最も注目したい対象—人、車、動物など—は数ピクセルにしか見えないことが多いです。本論文は、こうした極めて小さい物体を、街路や畑、夜間の雑音に囲まれていても、より正確かつ迅速に検出するために設計された新しいコンピュータビジョンシステム、CEIFNetを紹介します。
大きな画面で小さなものを見る
一般的な物体検出システムは地上レベルの写真向けに作られており、そこでの車や人はフレームの目立つ部分を占めます。ドローン画像ではカメラが数百メートル上空にあり、各対象は非常に小さく、ニューラルネットワーク内で画像が縮小されるとぼやけたり見失われたりしやすくなります。著者らは、YOLO系のワンショット検出器が日常シーンには有効だが、対象が極小かつサイズ変動が大きい場合には苦戦することを指摘します。シーン全体を把握するための繰り返しのダウンサンプリングは、これら小さなターゲットからの弱い信号を消してしまう傾向があります。
クローズアップ視覚と大局的文脈の融合
これに対処するため、CEIFNetは互いを補完する二つの視覚経路を組み合わせます。一方の経路は古典的な畳み込みフィルタを用い、角やテクスチャといった局所の鮮明なパターンを捉えるのに長けています。もう一方の経路はトランスフォーマー風のアテンション機構を使い、画像の離れた部分間の関係を結びつけ、シーン全体を理解するのに優れています。クロスステージトランスフォーマーブロックと呼ばれる中核ブロック内では、入力特徴が分割され、大半のチャネルは軽量な畳み込み経路を通り、残りの一部は長距離関係を推論するアテンション経路を通ります。これらを再結合することで、計算コストを爆発させることなく微細な情報と全体認識の両方をネットワークに与えます。
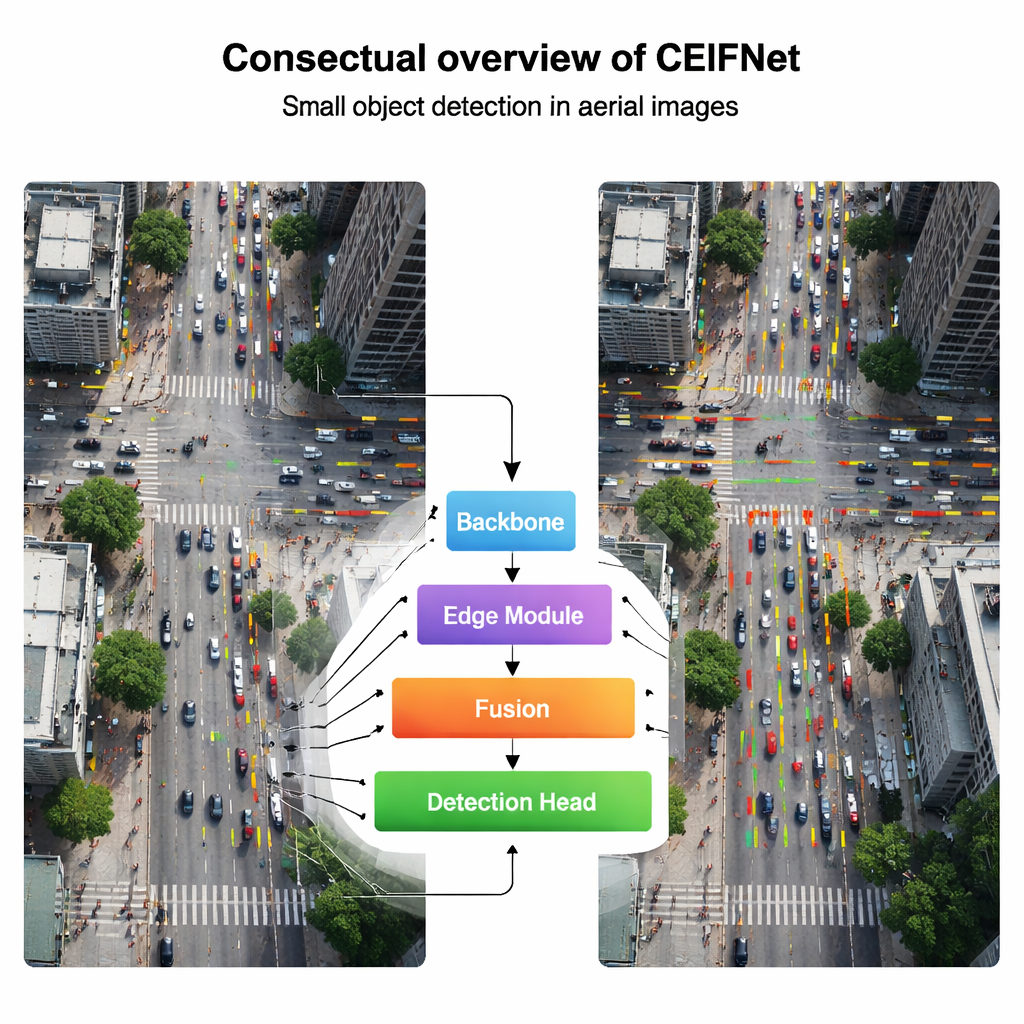
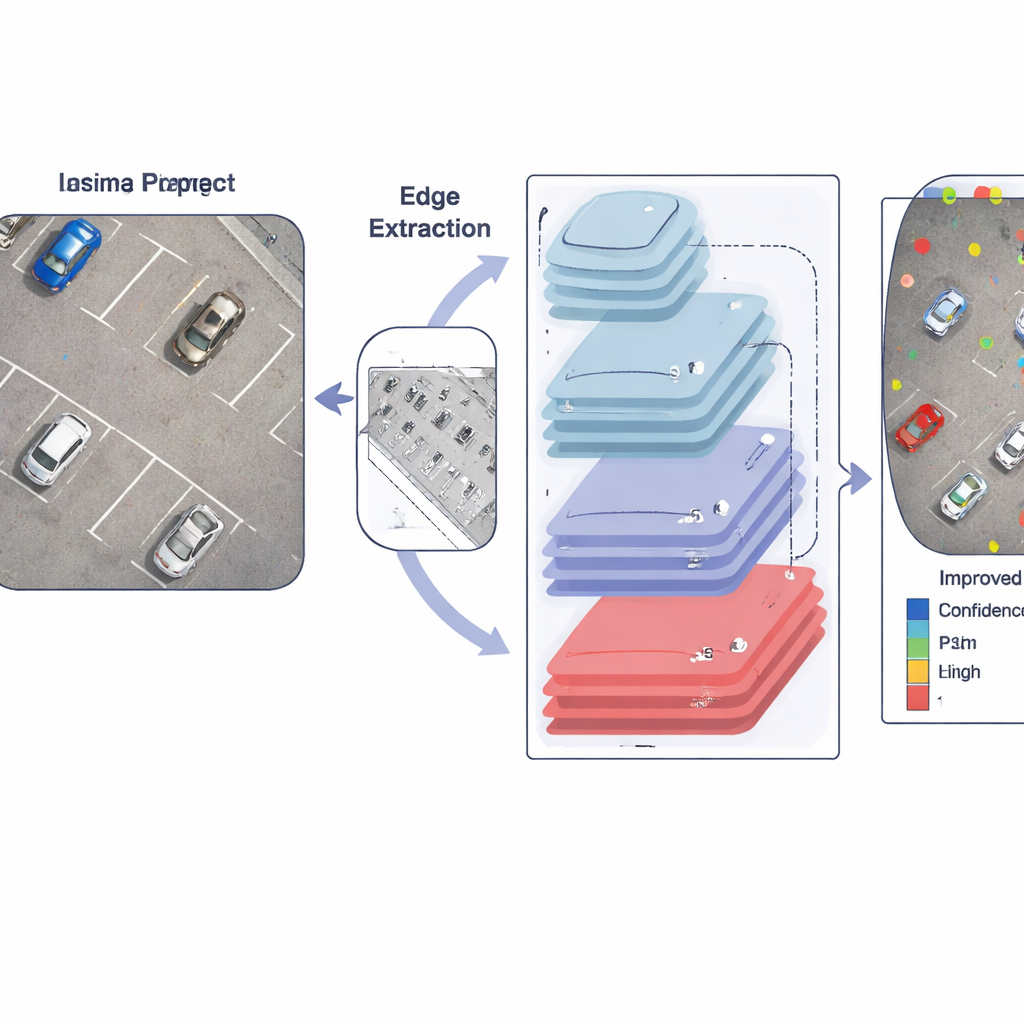
小さなターゲットの地図としてのエッジ活用
本論文の重要な洞察は、対象が数ピクセルしかない場合、物体の境界線—エッジ—が特に有用であるという点です。学習されたフィルタにのみ頼るのではなく、著者らは意図的にエッジ情報をネットワークに注入します。専用モジュールはまずソーベル演算子という単純だが堅牢なエッジ検出器を適用し、車や人の輪郭のように明るさが急変する箇所を強調します。これらのエッジマップは異なる特徴スケールに合わせて複数サイズにプーリングされ、チャネル間モジュールを通じて融合されます。画像がネットワークの深部へ流れるにつれて、こうした鋭化されたエッジの手がかりが後続層へ繰り返し供給され、通常のぼやけや縮小が起きても小さな物体の始まりと終わりを追跡するのに寄与します。
サイズ、位置、シーンの複雑さへの適応
出力側でCEIFNetは、見ているものに応じて動作を調整できる動的検出ヘッドを使います。固定フィルタを使用する代わりに、この最終段階は同時に三つの形式のアテンションを適用できます:特定の物体サイズを優先する、画像内のもっとも有望な位置に焦点を当てる、そしてもっとも情報量の多い特徴チャネルを強調する、というものです。これに加え、より細粒度のレイヤーを保持する特徴ピラミッド構造と組み合わせることで、混雑した交差点や忙しい駐車場、夜間の熱赤外シーンなど、現実的なドローン映像における小さく密集したターゲットに対してシステムはより敏感に反応します。
実際のドローンシナリオでの性能検証
研究者らはCEIFNetを二つの過酷なドローンデータセットで評価しました:昼間の都市・郊外シーンから成るVisDrone2019と、多くのターゲットが薄く小さい熱赤外コレクションであるHIT-UAVです。両データセットで、新しいシステムは強力なYOLOベースのベースラインや他の最新検出器群よりも高い精度で物体を検出し、強力なグラフィックスカード上でリアルタイムで動作するのに十分な速度を維持しました。綿密なアブレーション実験により、ハイブリッドブロック、エッジモジュール、余分な細粒度レイヤー、動的ヘッドといった各構成要素が総合的な性能向上に寄与していることが示されました。
日常技術への意義
専門外の方への要点として、CEIFNetはドローンが大規模で複雑なシーンの中で「小さなものに気付く」ためのより賢い方法を提供する、ということです。エッジ情報を保持し、局所の詳細と大域的文脈を混ぜ合わせ、注意を動的に適応させることで、他のシステムが見落としたり位置を誤認したりする小物体を検出できます。これにより交通安全、捜索救助、精密農業といった空中監視の信頼性が向上し、ますます高く広い視点から信頼できる情報を抽出する将来のシステムへの道を示します。
引用: Xiao, J., Li, C., Chen, H. et al. Cross-stage edge information fusion network for small object detection in aerial images. Sci Rep 16, 7639 (2026). https://doi.org/10.1038/s41598-026-36251-5
キーワード: 航空物体検出, 小さな物体, ドローン撮影, エッジベース視覚, 深層学習