Clear Sky Science · ja
グラフ信号処理に基づくFDA-MIMOレーダのための範囲・角度・速度同時推定アルゴリズム
混雑し騒がしい世界のための賢いレーダー
自動運転車から航空機監視に至るまで、現代社会は迅速かつ確実に物体を検出・追跡できるレーダーシステムに大きく依存しています。空域や道路、電波環境がますます混雑する中、レーダーは強い干渉やノイズの存在下で複数の移動標的を識別しなければなりません。本稿は、グラフ信号処理という新興分野の手法を取り入れることで、FDA-MIMOと呼ばれる強力なレーダーの一群が距離・方向・速度の三次元でより明瞭に対象を見通せるようにする新しい方法を紹介します。
なぜこの新しいレーダーアーキテクチャが重要なのか
従来のフェーズドアレイレーダーは主に角度方向にビームを切り替える、いわば懐中電灯を左右に向けるような動作をします。一方で周波数分散アレイ(Frequency Diverse Array: FDA)レーダーは各アンテナ素子がわずかに異なる周波数で送信する点が異なります。そのわずかな違いにより、ビームパターンは角度だけでなく距離や時間にも依存するようになります。これを多入力多出力(MIMO)技術と組み合わせると、FDA-MIMOレーダーは理論上、標的がどれくらい遠くにいて、どの角度にあり、どれだけの速さで移動しているかを三次元で特定できます。課題は、多数の標的が存在し信号がノイズに埋もれているような状況で、生の反射信号からその全情報を迅速かつ正確に抽出することです。
レーダー反射をネットワーク問題に変換する
著者らはこの課題に対し、レーダーの観測をグラフ上に存在する信号として再構成することで取り組みます。このグラフの各ノードはFDA-MIMOアレイにおける特定の送受信アンテナ対を表し、リンクは隣接ノード間の空間的な信号関係を捉えます。これらの結びつきを慎重に定義することで、ある距離と角度に標的がある場合に反射が配列全体にどのように伝搬するかを記述する「隣接行列」を構築します。仮定した距離–角度の組が実際の標的と一致すると、測定された反射パターンはグラフの固有振動モードの一つとほぼ整合します。実際には、グラフ版のフーリエ変換を施すとエネルギーが単一のスペクトル成分に鋭く集中します。アルゴリズムは距離・角度のグリッドを横断してそのようなピークを探索し、標的の位置を見つけます。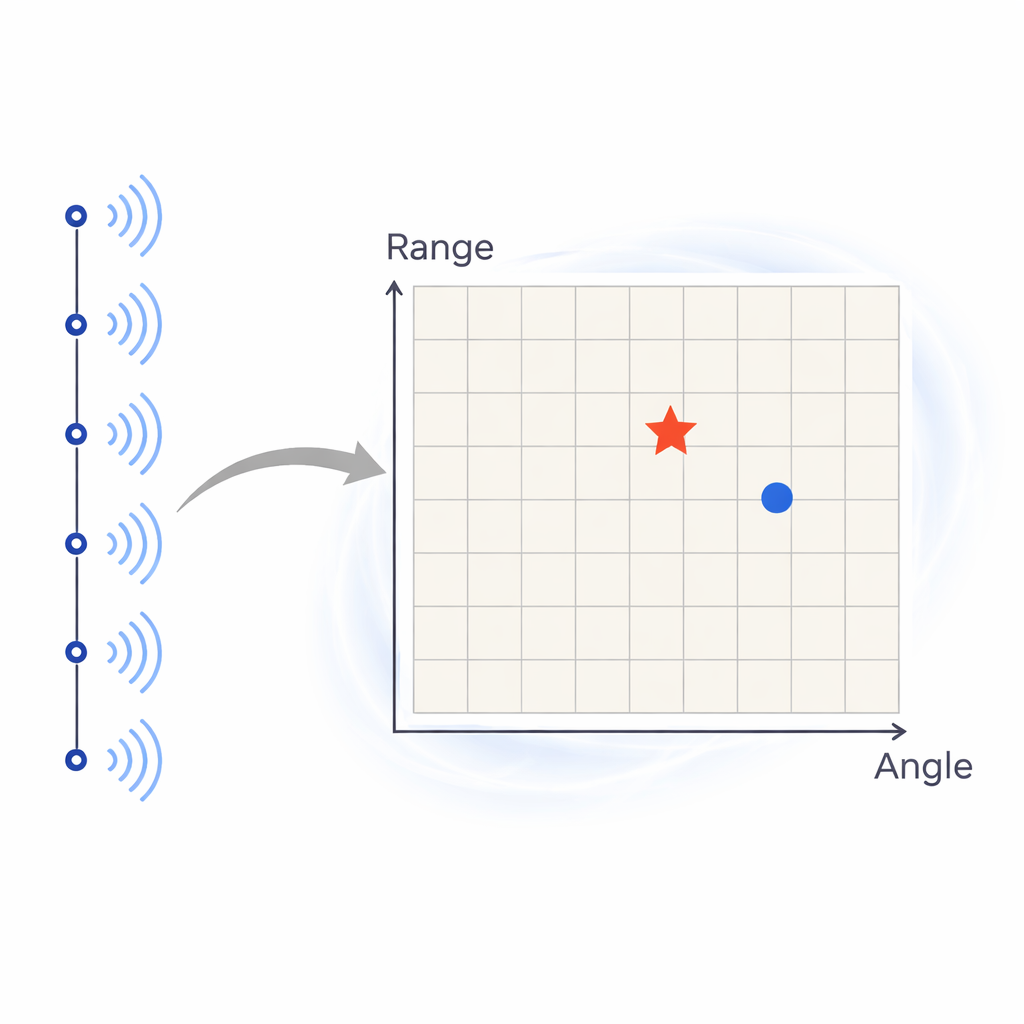
動きを加える:同じ考えで速度を測る
標的の速度を推定するために、この手法は時間次元、つまり複数のレーダーパルスにわたるグラフ概念を拡張します。ここでは各ノードが時間上の各パルスを表し、リンクは標的のある放射速度に従って信号がどのように変化するかを捉えるために隣接するパルスをループ状につなぎます。再び、仮定した速度が真の速度と一致すると、変換された信号はグラフのスペクトル領域で集中したピークを示します。アルゴリズムは候補となる速度を走査し、そのピークが最も強く現れる場所を探します。重要な点は、著者らが空間グラフからの距離–角度推定と時間グラフからの速度推定が互いに補強し合うように枠組みを設計していることです。全アンテナと全パルスからのデータを結合し、多次元的な構造を形成することで、冗長な計算を増やすことなく精度を向上させます。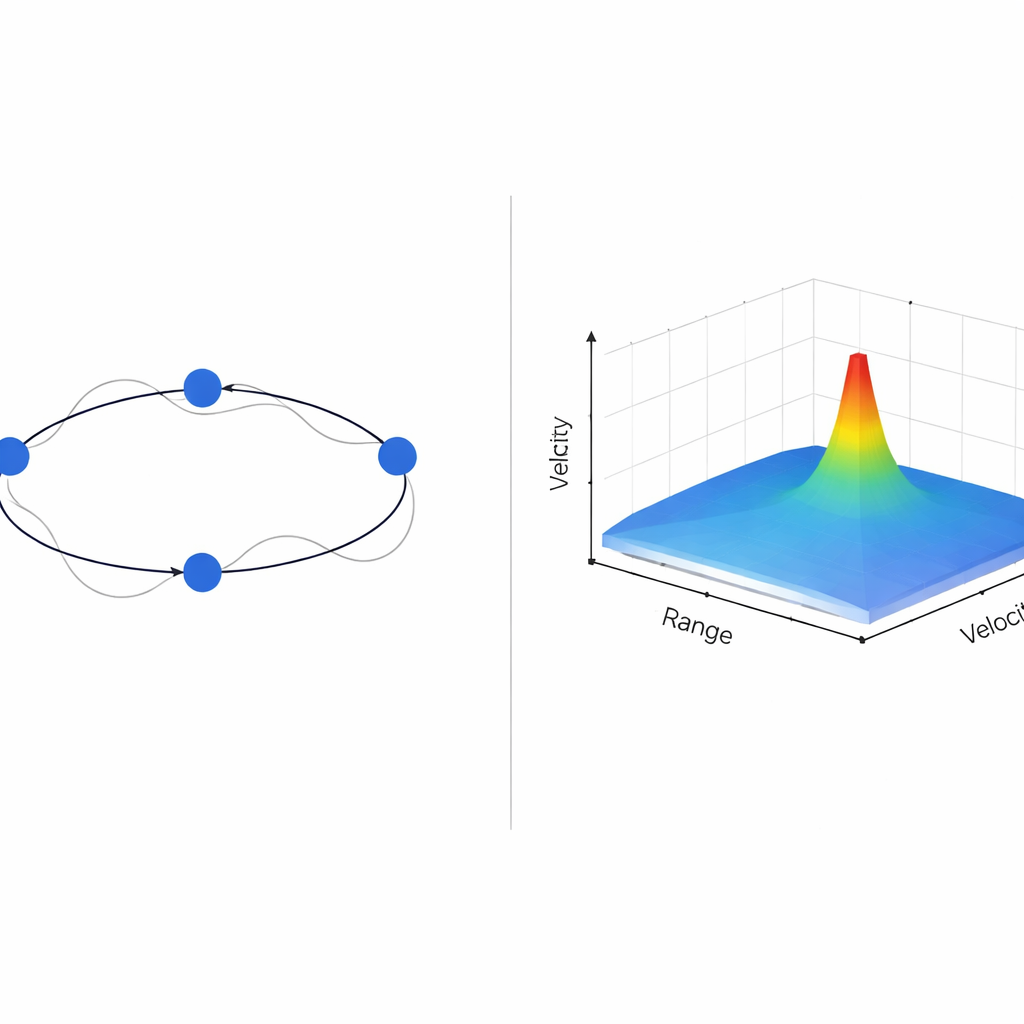
方法の検証
一連のシミュレーションを通じて、研究者らは提案するグラフベースのアプローチを高精度手法として広く用いられるMUSICと比較します。単独および複数標的のシナリオ、近接する物体の分離能、信号対雑音比が極めて低い場合の性能を検証します。グラフベースのアルゴリズムは古典的手法と同等の計算負荷を実現しつつ、距離・角度・速度においてより鋭い分解能を提供します。特にノイズによる誤ったピークを抑制する効果が高く、よりクリーンで信頼性の高い標的マップを生成します。信号対雑音比が低く、多くの従来法が苦戦する状況でも、新しいアルゴリズムは標的の位置や速度に関する誤差の上限を堅く保ちます。
実世界のレーダーにとっての意義
平たく言えば、本研究はレーダーデータをネットワーク上に存在するものとして扱うことで、実際の標的とクラッターをより明瞭に分離できる賢い処理を可能にすることを示しています。防衛や航空管制から自動車の安全、環境センシングに至る応用分野で、提案手法は困難な条件下で複数の移動物体をより正確に追跡する可能性を約束します。過大な計算リソースを必要とすることなく、先進的なアンテナ設計とグラフベースの数学を融合することで、著者らはますます複雑化する電磁環境においてより遠く、より鮮明に、より確実に“見る”レーダーへの実用的な道筋を示しています。
引用: Li, Q., Meng, A., Liao, K. et al. A joint range–angle–velocity estimation algorithm for FDA-MIMO radar based on graph signal processing. Sci Rep 16, 6000 (2026). https://doi.org/10.1038/s41598-026-36124-x
キーワード: レーダーセンシング, ターゲット追跡, 信号処理, グラフ信号処理, FDA-MIMO