Clear Sky Science · ja
スマートシティのUAV経路計画のためのPPOヒューリスティックを用いた方向認識型自己適応A*アルゴリズム
都市ドローンのための賢い経路
高層ビルの間を縫うように飛び、医薬品や荷物、緊急物資を都市全体に届ける小型配送ドローンの群れを想像してください。安全かつ迅速に飛行するために、各ドローンは常に次にどの方向へ進むかを決め続けなければなりません。本稿は、混雑した三次元の都市空間でドローンがより良い経路を見つけられる新たな手法を紹介します。これにより、従来手法よりも短く、滑らかで、信頼性の高い航路が実現します。

なぜ良い経路探索は難しいのか
ドローンにとって経路選択は、単に点Aから点Bまで直線を引くだけの問題ではありません。建物や樹木、飛行禁止区域を避ける必要があり、旋回や高度に関する制約も守らねばなりません。よく知られたA*アルゴリズムのような古典的な経路計画法は単純な地図ではうまく機能しますが、現実的な3D都市環境では苦戦します。しばしば多くの候補を無駄に探索し、計算資源を浪費したり、必要以上にジグザグな経路を生んだり、環境が非常に複雑な場合には失敗することすらあります。スマートシティがより複雑になるにつれ、これらの弱点は安全で効率的な空域管理の深刻なボトルネックになります。
古典手法への方向認識型アップグレード
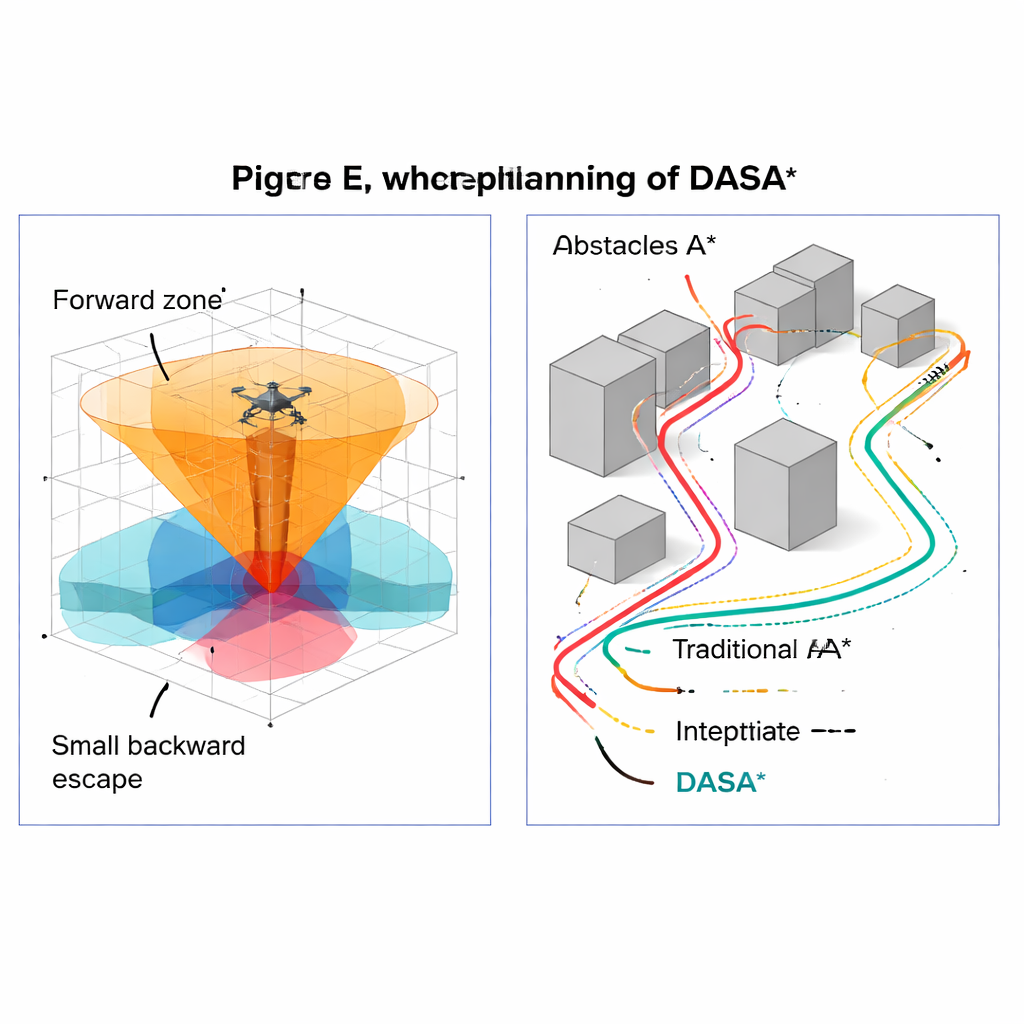
著者らはA*アルゴリズムを基盤に、DASA*(Direction‑Aware and Self‑Adaptive A*)と呼ぶ拡張版を提案します。ドローンの周囲を無差別に探索する代わりに、DASA*は目標の方向に注意を向けます。近傍の候補位置を、目標に向かう前方寄りの層、側方の層、行き止まりから脱出するのに役立つ少数の後方層の三層に分類します。単純なスタール(停滞)検出器が探索が「行き詰まり」つつある兆候を監視し、その際には狭い前方コーンからより広い近傍へ自動的に探索範囲を拡大します。このような目標に整合した慎重な展開は、無駄な探索を減らしつつ、有効な経路が存在する場合にはそれを見つけることを保証します。
混雑空間と開放空間への自己適応
DASA*のもう一つの重要な特徴は、周囲の状況に応じて歩幅を変えることです。障害物から十分に離れているときは大きなステップを取り、開けた空間を迅速に進みます。建物やその他の危険に近づくと小さなステップに切り替え、狭い隙間で精密な操縦を可能にします。この可変的な「ズームレベル」により、安全な場所では素早く移動し、精度が必要な場所でのみ減速できます。粗い経路が見つかった後、専用の調整段階で不要な経由点を除去し、残った主要点に滑らかな曲線を当てはめます。その結果、衝突を避けるだけでなく、熟練パイロットが選ぶような自然な飛行経路に近い、急激な曲がりの少ない経路が得られます。
先を見越すようアルゴリズムに教える
従来のA*は、各位置が目標からどれだけ離れているかを推定するために単純な距離式に依存します。DASA*はこの推測を、Proximal Policy Optimization(PPO)という現代的な強化学習手法に基づく学習ガイドで置き換えます。訓練環境では、仮想エージェントが三次元空間で目標に向かって移動することを繰り返し練習し、距離や高さ差、方向情報を感知します。ニューラルネットワークは徐々に各状況の有望さを学習し、訓練後はDASA*のプラグイン式「直感モジュール」として機能します。この学習されたヒューリスティックは、特に単純な直線距離が誤解を招くような複雑な配置において、探索をより直接的に良好な解へ導きます。
仮想都市での実効性
研究者らは、箱形ビルや円筒状障害物で構成され現実の都市構造を模した複数の三次元都市シナリオでDASA*を評価しました。古典的なA*や、改良型の急速探索木(RRT)、粒子群最適化、差分進化、Theta*と呼ばれる別のA*の変種など、いくつかの代表的手法と比較しました。多くのテストケースにおいて、DASA*は一貫して短い経路を見つけ、展開する候補点数が大幅に少なく、計算速度も非常に速く—標準的なA*よりしばしば10倍から50倍速い—結果を示しました。また、迷路状に密集した環境でも成功率はほぼ完璧であったのに対し、競合手法のいくつかは失敗が多かったり、長くループする遠回りを生成したりしました。
日常生活への意味
単純に言えば、DASA*は飛行ロボットにより良い方向感と判断力を与えます。有望な方向に焦点を当て、局所環境に応じて詳細度を適応させ、成功に近いかを学習により見極め、最終経路を磨くことによって、生の地図データを効率的で滑らか、実用的な航路に変換します。実際のシステムに採用されれば、このアプローチは、空域が混雑し環境がますます複雑化する中でも、将来のスマートシティにおけるドローン配送、点検、緊急対応の安全性と信頼性の向上に寄与する可能性があります。
引用: Zhang, X., Tan, L. & Chai, J. Direction aware and self-adaptive A* algorithm with PPO heuristic for UAV path planning of smart city. Sci Rep 16, 6174 (2026). https://doi.org/10.1038/s41598-026-36066-4
キーワード: UAV経路計画, スマートシティドローン, A*アルゴリズム, 自律航行, ロボット運動計画