Clear Sky Science · ja
セマンティックセグメンテーション誘導型強化学習を用いた非構造化屋外環境での自律航行
森をハイキングするロボットの学習
小型ロボットが自力で森林の小道を歩き、GPSや人間のジョイスティックなしに木々や岩の間を縫うように進めると想像してみてください。本稿は、こうしたロボットに濃密な林の中で経路を「見分け」、瞬時ごとに安全に前進する方法を判断させるシステムを説明します。本研究は、森林監視、山火事予防、捜索救助、あるいは衛星信号が弱い・存在しない地域での屋外配送など、将来のロボット応用にとって重要です。
なぜ森林はロボットにとって難しいのか
森林は自律機械にとって最も過酷な環境の一つです。小道は狭く曲がりくねり、地面は不均一で、枝や茂みが視界を遮り、高い樹木によりGPS信号が不安定になります。従来の航法法は正確な地図、強いGPS、あるいは高価なレーザーセンサに依存しがちで、街路や工場床のような明確で構造化された空間を前提としています。森林ではこれらの前提が崩れます:影、季節変化、濃い植生が単純な視覚システムを混乱させ、ルールベースの制御器は実際の小道で生じる多様で予期せぬ状況に対応するのが難しくなります。
三つの「脳」が協働する
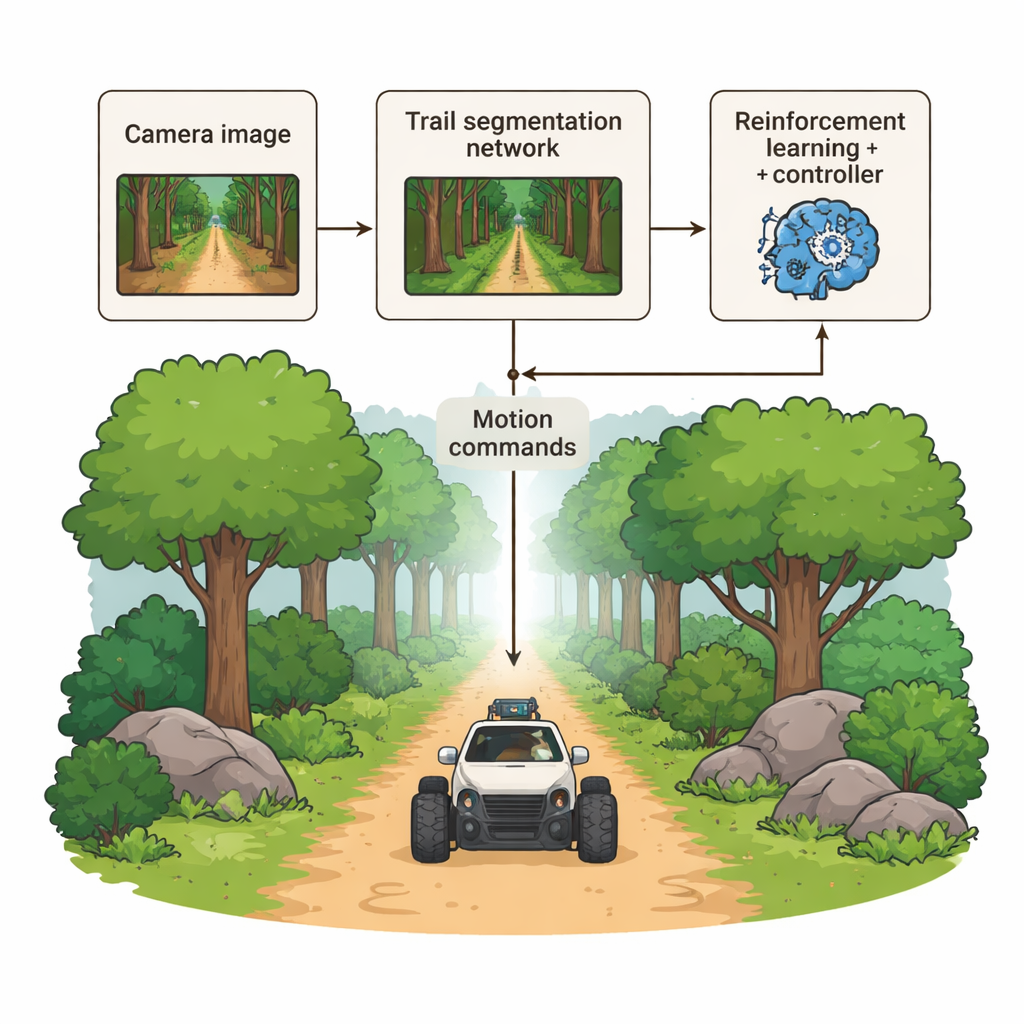
著者らは、ロボットに三つの補完的な「脳」を与えるハイブリッド航法システムを提案します。第一に、深層視覚モジュールが各カメラ画像を解析し、ピクセル単位に近い精度で歩行可能な小道の領域を示します。第二に、学習ベースの意思決定モジュールは強化学習を用いてスムーズな舵取りと速度指令を選び、小道上に留まり、衝突を避け、効率的にゴールに到達する行動を報酬します。第三に、古典的なコントローラが予測された小道の形状を安定した車輪運動に変換し、急な動きをならしてロボットの軌跡をぎくしゃくさせずに保ちます。単一のブラックボックス的なエンドツーエンドネットワークではなく、これらのモジュールは分離されつつも緊密に連携し、各段階を理解・デバッグしやすくしています。
小道を認識する視覚の教育
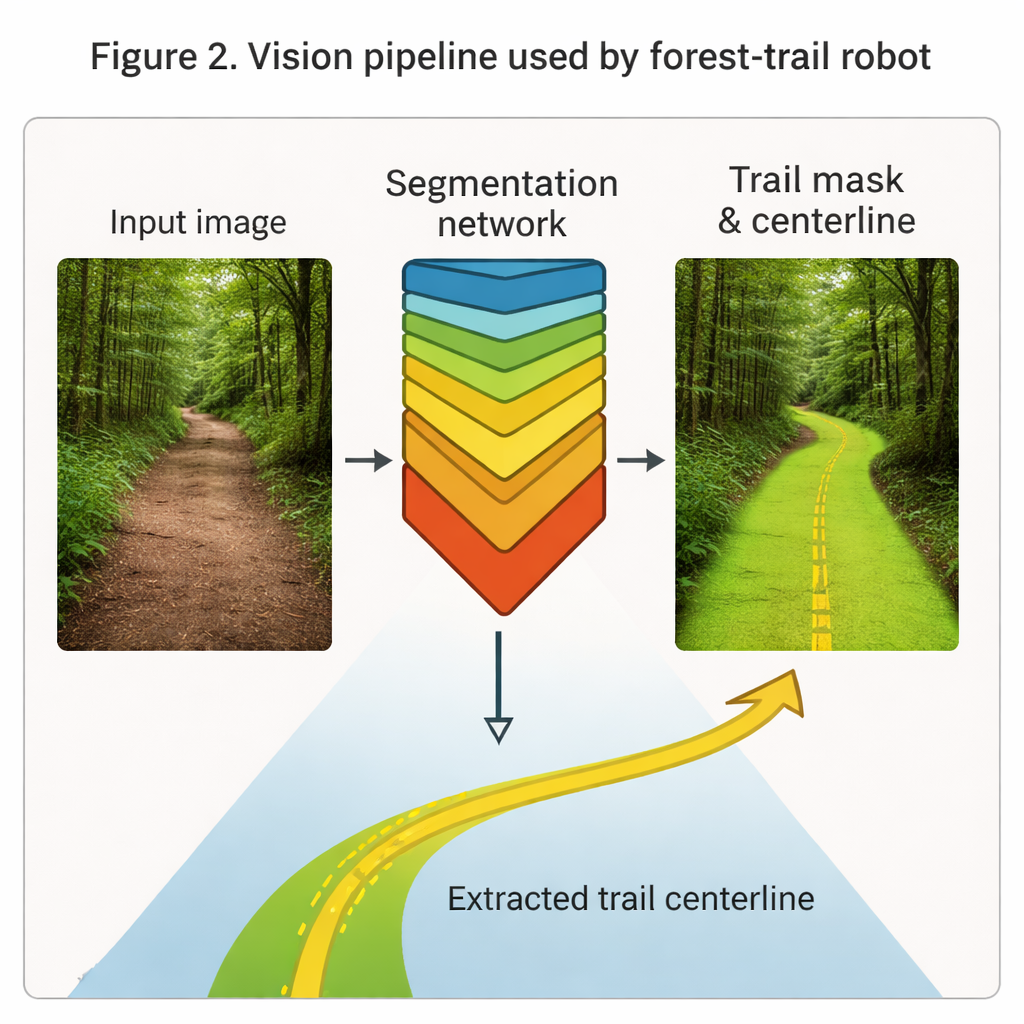
ロボットの「目」の中心にはMask R-CNNとして知られる深層ネットワークがあり、ここでは通常のカラー画像から森林の小道を強調するように調整されています。人間の目の高さから撮影され、光や天候、小道の種類が多様な約24,000フレームの実際のハイキング映像で学習させることで、システムは各フレームの小道領域をクリーンなマスクとして描くことを学びます。このマスクからは進行方向と曲率を捉えた細い中心線が抽出されます。テストでは視覚モジュールは人手で描かれたラベルと高い重なりを示し、ピクセル精度90%超を達成しており、枝や影が部分的に道を隠している場合でも堅牢に小道を輪郭化します。これらの幾何学的手がかりは、「道がどこにあるか」を簡潔に記述した形で学習と制御の両モジュールに直接供給されます。
良い判断を行うロボットの訓練
第二の重要な要素は意思決定モジュールで、強化学習という手法を用います。何を正確にすべきかを教え込むのではなく、ロボットは現実的なシミュレートされた森林内で行動を試し、良い結果には報酬を、悪い結果には罰則を受けます。小道に沿って前進することは報酬となり、逸脱、障害物との衝突、立ち往生は罰となります。約150,000ステップの訓練を通じて、システムは小道の中央を保つ戦略、曲がり角を優雅に処理する方法、枝や岩が現れたときの適切な反応を徐々に発見します。動作を滑らかで安全に保つために、学習された行動は古典的コントローラの出力とブレンドでき、特に急なカーブやノイズの多い状況で有用です。
システムの実地試験
この組み合わせの有効性を評価するため、研究者らは三種類の詳細な仮想森林を構築しました:狭く散らかった小道のあるもの、急な不均一地形と大きな障害物があるもの、分岐や行き止まり、紛らわしい偽の小道が多いものです。これらの地図で90試行を行った結果、ロボットは衝突なくゴールに到達したのは約87%のエピソードで、平均衝突回数は1回あたり0.2件程度、通常は小道中心から約30センチ以内に留まりました。経路完了も速く安定していました。モジュールを一つずつ削除・簡素化すると性能は著しく低下し、三つの構成要素がいずれも必要であることを示しました。レーザースキャナを用いるシステムを含む他の最近の手法と比較しても、この視覚のみのハイブリッド手法は成功率、精度、安全性の総合的なバランスで最良の結果を示しました。
現実世界のロボットにとっての意義
専門外の方への要点は、ロボットが注意深く有能なハイカーのように山道を歩けるようになりつつあるということです。「これは道だ」という強い視覚的文脈、「これらの動きは以前うまくいった」という経験に基づく意思決定、そして安定した操舵機構を組み合わせることで、提案システムは小型の車輪付きロボットが地図やGPSなしで複雑な森林を航行できるようにします。研究はシミュレーションで評価されており、極端な照明や稀な小道タイプなどの課題は残りますが、将来の現地で活動するロボットが人と安全に共有できる実践的な設計図を提供し、森林の調査、救助隊の支援、自然資源の管理に貢献する可能性があります。
引用: Tibermacine, A., Tibermacine, I.E., Akrour, D. et al. Autonomous navigation in unstructured outdoor environments using semantic segmentation guided reinforcement learning. Sci Rep 16, 2633 (2026). https://doi.org/10.1038/s41598-026-36022-2
キーワード: 自律航行, 森林ロボティクス, コンピュータビジョン, 強化学習, セマンティックセグメンテーション