Clear Sky Science · ja
改良型スーパー・ツイスティング滑りモード観測器と滑らかな遷移最適化に基づくPMSMの全速度域無センサ位置制御戦略
追加ハードウェアなしで電動機を賢く保つ
電気自動車から航空機のアクチュエータまで、多くの現代機器は永久磁石同期電動機(PMSM)と呼ばれる特殊な電動機に依存しています。これらのモータは効率が高く出力も強力ですが、通常は回転速度やロータ位置を正確に追跡するための繊細なセンサを必要とします。センサはコストを押し上げ、過酷な環境では故障しやすくなります。本研究は、機械的な位置センサを一切使わずに、この種のモータを全速度域で滑らかかつ正確に駆動する方法を探ります。
センサを取り除くのが難しい理由
一般的なPMSM駆動では、ロータシャフトに小型の位置センサが取り付けられ、制御系にロータの正確な角位置を伝えます。その情報は、例えば回転するメリーゴーラウンドを適切なタイミングで押すように、巻線へ電流を最適な時点で投入するために不可欠です。しかしセンサは壊れやすく嵩張り、コストもかかります。技術者は長年、モータ自身の電気信号からロータ位置を推定する「無センサ」手法でこれを置き換えようとしてきました。問題は、どの単一手法もすべての回転速度でうまく機能するわけではないことです。低速では電気的な手がかりが弱く、高速では単純なトリックがノイズや不正確さに悩まされます。そのギャップを段差や振動、制御喪失なしに埋めることが一貫した課題でした。
モータの声を聞くための二つの巧妙な手法
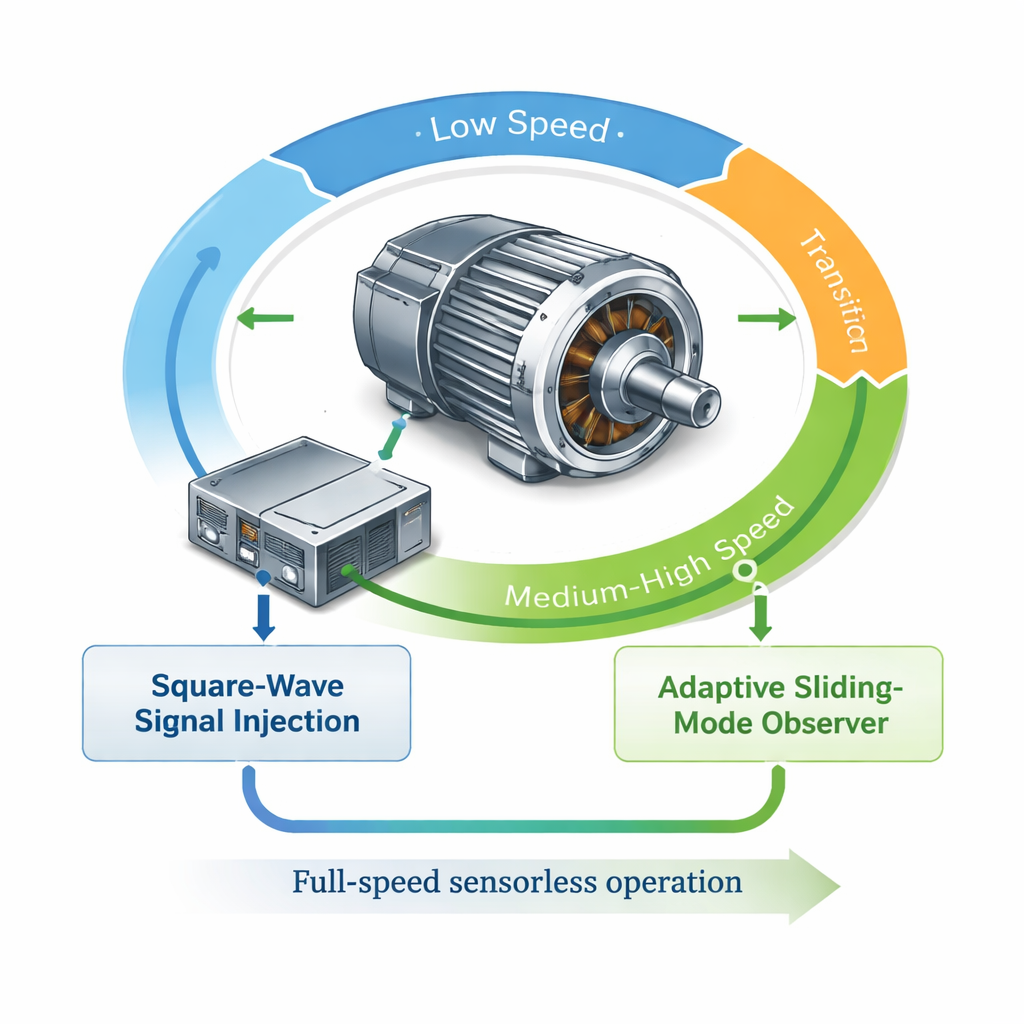
全速度域をカバーするために、著者らは補完的な二つの無センサ手法を組み合わせます。低速域では、モータの自然な電気フィードバックが信頼して測定できるほど十分でないため、巻線に意図的に高速の方形電圧信号を注入します。モータはロータ角に応じて異なる応答を示すため、得られた高周波電流を解析することでコントローラはロータの位置を推定できます。この「高周波注入」アプローチは、柔らかな探査信号を送りその反響を読むようなものです。一方、中速から高速では逆起電力として知られる自然なフィードバックが強くなるため、測定された電圧と電流からロータ位置と速度を推定する高度な数学的観測器を使用します。
デジタル観測器をより賢く、より静かにする
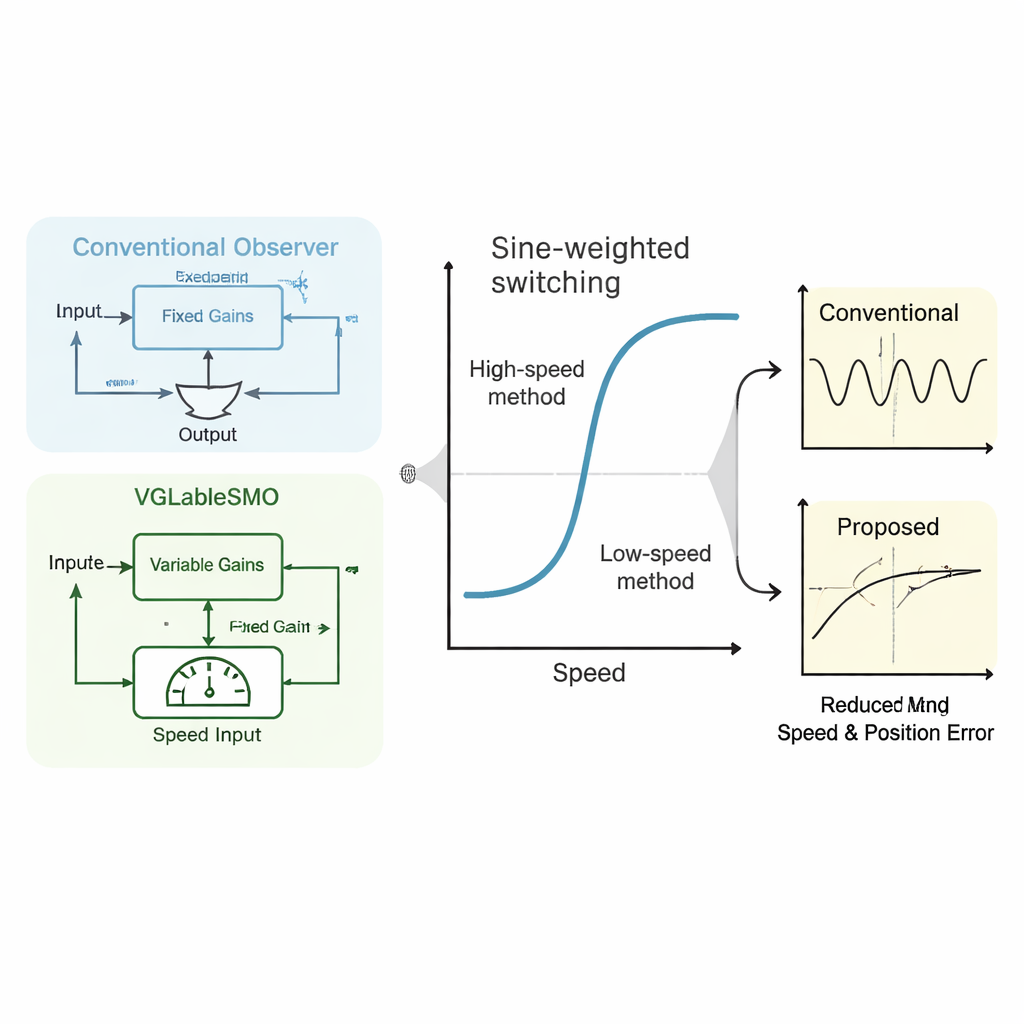
高速側の中核的な革新は、可変ゲイン線形スーパー・ツイスティング滑りモード観測器(VGLSTSMO)と呼ばれる改良観測器です。従来の滑りモード観測器はノイズや外乱に対して頑健であると評価されますが、しばしば“チャタリング”と呼ばれる小さく急速な振動が発生し、トルクや速度に波及することがあります。また内部の設定が固定されているため、ある動作条件では優れていても別の条件では性能が落ちることがあります。提案された観測器は、回転速度の変化に応じて内部ゲインを自動的に調整し、推定値を真の値へ穏やかに引き寄せる補正項を追加します。さらに適応機構がモータ内部電圧の推定を精緻化し、速度と位置の精度を向上させます。数値シミュレーションでは、この賢い観測器により中〜高速域での位置誤差が約0.9ラジアンから約0.2ラジアンに低減し、負荷変動後の収束時間も短縮されることが示されています。
低速と高速の受け渡しを滑らかにする
二つの異なる推定法を併用すると、加速時にどのように滑らかに受け渡すかという別の問題が生じます。単純な方法は一方の手法を直線的にフェードアウトし、他方をフェードインする重み付けですが、それでもトルクや速度に段差を生じることがあります。著者らはより穏やかな正弦形の重み付け関数を提案します。選択した遷移帯域内で、制御系は低速法から高速観測器への信頼を、鋭いランプではなく滑らかな波形に従って段階的に移行させます。この改良されたブレンドは、切り替え中の速度ジャンプや角度の乱れを目に見えて低減し、一時的な角度誤差を小さくし、誤差の収束時間を半減します。
実機にとっての意味
総じて、低速でのプロービング、高速での適応観測器、そして正弦重み付けによる滑らかな切り替えを組み合わせた戦略は、機械的センサなしで全速度域にわたり安定かつ精度の高い制御を実現します。シミュレーションでは、提案手法が速度のオーバーシュートや定常誤差を小さく抑え、ノイズや摩耗、不快感の原因となる激しいチャタリングを回避することが示されています。日常的な用途では、電気自動車や産業用駆動、推進システムがより信頼性が高く、コンパクトで低コストになりつつ、シャフト取り付けの壊れやすいセンサに依存せずに精密な運動制御を維持できることを意味します。
引用: Zhang, X., Li, P., Wang, B. et al. Full-speed domain position sensorless control strategy for PMSM based on improved super-twisting sliding-mode observer and smooth transition optimization. Sci Rep 16, 5730 (2026). https://doi.org/10.1038/s41598-026-35994-5
キーワード: 無センサモータ制御, 永久磁石同期電動機, 滑りモード観測器, 高周波信号注入, 電動駆動システム