Clear Sky Science · ja
構造パラメータがデルタ並列ロボットのワークスペースに及ぼす影響と茶の生葉選別用途に向けた経路適応最適化
ロボットが茶工場に入る
生の茶葉は繊細だ。芽を潰したり葉を打ち傷つけたりすると、出来上がる飲み物の品質に影響する。それでも手作業での選別は疲労が溜まりやすく、速度も限られる。本稿は、軽量で高速に動ける産業用ロボット、いわゆるデルタロボットをどのように調整すれば、茶のコンベヤ上で葉を丁寧かつ確実に、かつ迅速に扱えるかを検討する。
茶葉が特別な扱いを必要とする理由
現代の茶加工では、生葉の選別が品質と価格に直結する。人手では長時間のシフトで歩調と均質性を保つのが難しい。高速包装で広く使われるデルタロボットは、剛性と精度が高く、素早く動けるため適合しそうに見える。しかし従来の多くの設計は箱や部品など一般的な物体を対象としており、二つのコンベヤ間の狭い領域にある壊れやすい芽を扱う想定ではない。ロボットの“ワークスペース”――到達可能な三次元領域――はこの狭い空間に合致し、取り上げ・持ち上げ・横移動・配置という門型の動作を、自身の構成部品と衝突せずに行える必要がある。
ロボットの形状が到達範囲をどう制御するか
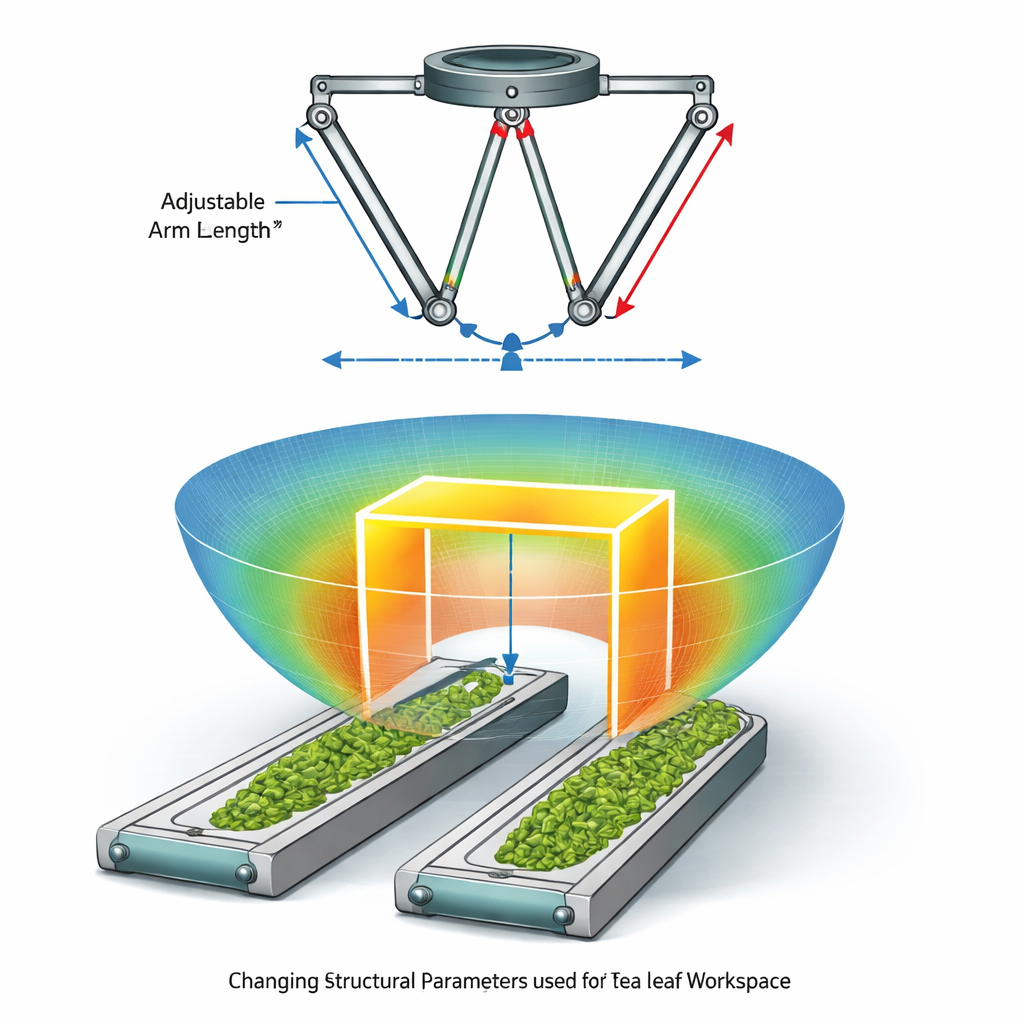
著者らはまずデルタロボットの運動を詳細に数学的に記述することから始める。三つの駆動関節の角度を、吸着グリッパーを載せた小さな可動プラットフォームの正確な位置に結び付ける。順運動(角度→位置)と逆運動(位置→角度)の両方の計算を用いて、関節角が安全な範囲に制限されたときにエンドエフェクタが到達し得る全ての点を定義する。これらの方程式をMATLABに実装して、ロボットの到達可能体積をシミュレーションし、複数の視点からカラフルなボウル形状の点群として可視化する。このワークスペースが、設計が茶葉選別経路を扱えるか評価するための基礎となる。
仮想実験で多数の設計を試す
複数の物理プロトタイプを作る代わりに、研究チームは四つの主要な幾何学的選択を設計のつまみとして扱う:上腕長(L)、下腕長(l)、固定基部三角形の半径(R)、可動三角形の半径(r)。直交実験計画を用いて、これら四つのパラメータをそれぞれ三段階で効率的に組み合わせ、九つの仮想ロボットを作成する。各ケースについてプログラムは総ワークスペース体積を算出し、高さ200 mm、幅400 mm、奥行200 mmの標準化された門型経路ボックスとどう重なるかを示す。これにより、各ワークスペースがどれほど大きいかだけでなく、茶葉がコンベヤ上を通る領域を実際にカバーするかどうかが分かる。
どの寸法が最も重要かを見つける
九つのシミュレーション設計を比較することで、どの構造選択が実用的な到達範囲に強く影響するかの順位付けが行われる。最も影響力が大きかったのは下腕(受動アーム)長で、下腕が長いほどワークスペースは大きくなる。次に重要なのは上腕(能動アーム)長で、これも可動域を広げるが、長くし過ぎると振動を招く可能性がある。基部半径は中程度の影響を持ち、基部が広すぎると可動アームがフレームと衝突しやすくなり、実際に使える体積が縮小する。可動プラットフォームの半径の影響は最も小さいが、プラットフォームを小さくするとアームの動作空間が若干広がる。範囲と分散の解析から、あるパラメータ組が総ワークスペースを最大にしても、茶葉選別に重要な狭い門型領域を必ずしもカバーするわけではないことが示される。
茶ラインに合う設計
最も実用的な構成は、全体の体積が最大のものではなく、ワークスペースが門型軌跡をきれいに包むものだった。具体的には、上腕250 mm、下腕400 mm、基部半径90 mm、可動プラットフォーム半径50 mmという組合せが、二つのコンベヤ間の必要経路を完全にカバーしつつロボットをコンパクトで安定に保つ。基準面からおよそ325 mmの作業高さ付近で最も広い実用スパンを達成し、両ベルトをまたいで把持・持ち上げ・横移動・配置のサイクルを安全領域を外れることなく完遂できる。
将来の茶工場にとっての意味
専門外の読者にとっての要点は、ロボットの腕長やプラットフォーム寸法の小さな変更が、単に広い空間で印象的に動く機械と、実際の生産ラインで確実に働く機械との違いを生むということだ。本研究は各構造パラメータが到達可能体積および現実的な門型経路とのオーバーラップにどのように影響するかを定量化しており、これにより茶葉を迅速かつ正確に、かつ損傷を最小にして選別するデルタロボットの設計指針を提供する。同じ手法は、速度・精度・優しい取り扱いが同時に要求される他の食品や壊れやすい製品向けのカスタムロボット設計にも応用できる。
引用: Ren, C., Zheng, W. & Wang, R. Influence of structural parameters on the workspace of delta parallel robots and path adaptability optimization for tea fresh leaf sorting applications. Sci Rep 16, 6651 (2026). https://doi.org/10.1038/s41598-026-35969-6
キーワード: デルタロボット, 茶葉選別, ロボットのワークスペース, ピックアンドプレース, 産業オートメーション