Clear Sky Science · ja
ホウ素中性子捕捉療法のための表面誘導患者位置決めシステムの開発と評価
がん治療用中性子の狙いを鋭くする
ホウ素中性子捕捉療法(BNCT)は、周囲の健常組織をできるだけ温存しながら腫瘍細胞を選択的に損傷させ得る有望ながん治療法です。しかし、この精度を治療効果に結びつけるには、固定された中性子ビームの前で患者をミリメートル単位の精度で正確に配置する必要があります。本論文は、その繊細なセットアップをより速く、より正確に、そして技師の手作業や判断に頼りすぎないようにするために設計されたカメラとロボットによる新しい位置決めシステムを紹介します。
なぜ位置決めがそこまで重要なのか
患者の周囲を回転してX線ビームを再形成できる多くの現代的放射線治療装置とは異なり、BNCTは重量のある固定中性子源に依存しており、ビームの操向余地が限られます。したがって動くべきはビームではなく患者です。従来はレーザー、皮膚マーキング、手動の移動台操作でこれを行ってきましたが、その過程は遅く技師の熟練度に大きく依存し、小さな位置ずれが腫瘍や近傍臓器への実際の線量に影響を与え得ます。頭部や頸部など取り扱いの難しい部位の複雑な腫瘍を扱うBNCTセンターが増えるにつれ、これらの制約は重大な障害となります。
ハイテクの助っ人:カメラ、ソフトウェア、ロボット
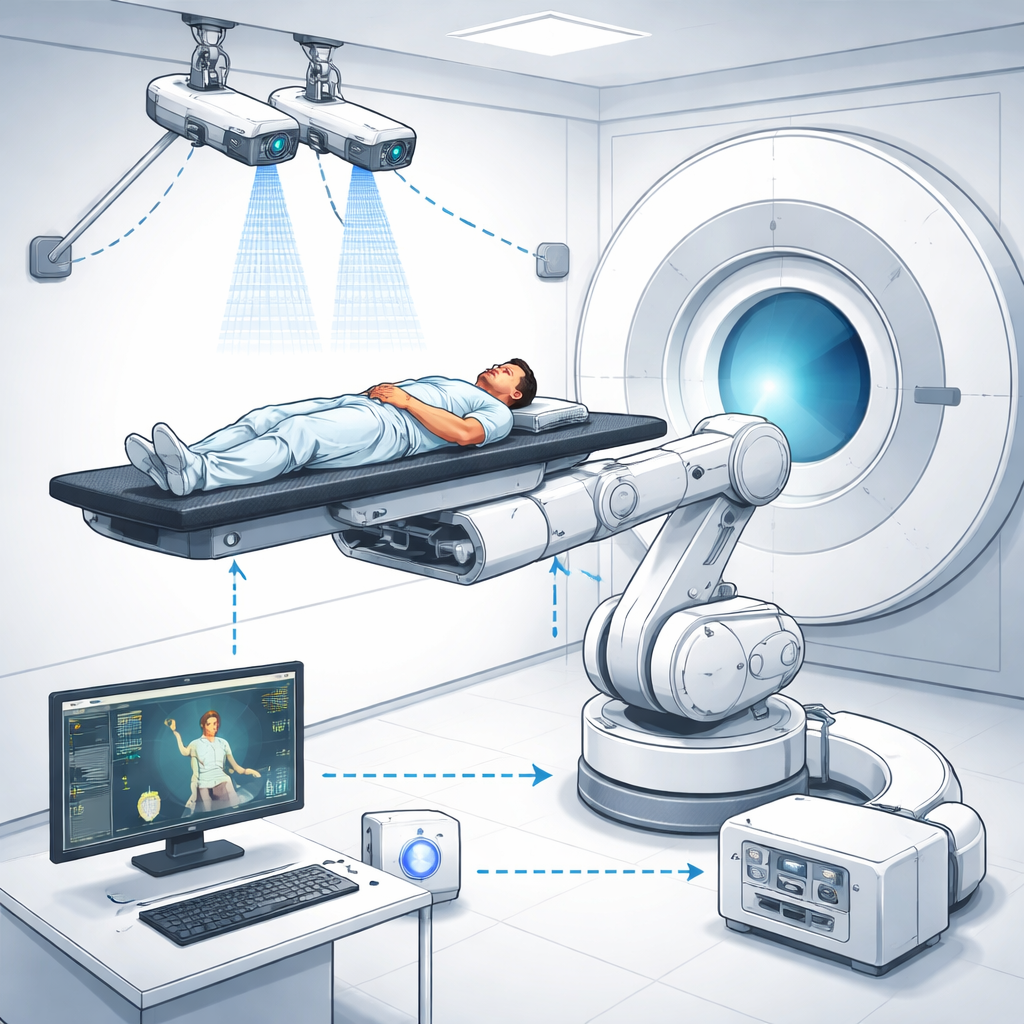
この問題に取り組むため、研究チームは3つの主要要素を組み合わせた統合型Surface-Guided BNCT(SG‑BNCT)システムを構築しました。具体的には、NeuMANTAという専用の治療計画ソフト、2眼のステレオビジョンカメラペア、そして治療ベッドを載せる6軸産業用ロボットです。NeuMANTA上では医師がCT画像上でBNCT治療を計画し、中性子ビームが通る正確な点と、患者皮膚上の3つの小さな基準点(フィデューシャルマーカー)を指定します。これらのマーカーは計画画像内での患者の位置を定義し、変換行列を介して計画座標系と実際の治療室座標系とを結びつけます。
3Dカメラがセットアップをどう「見て」補正するか
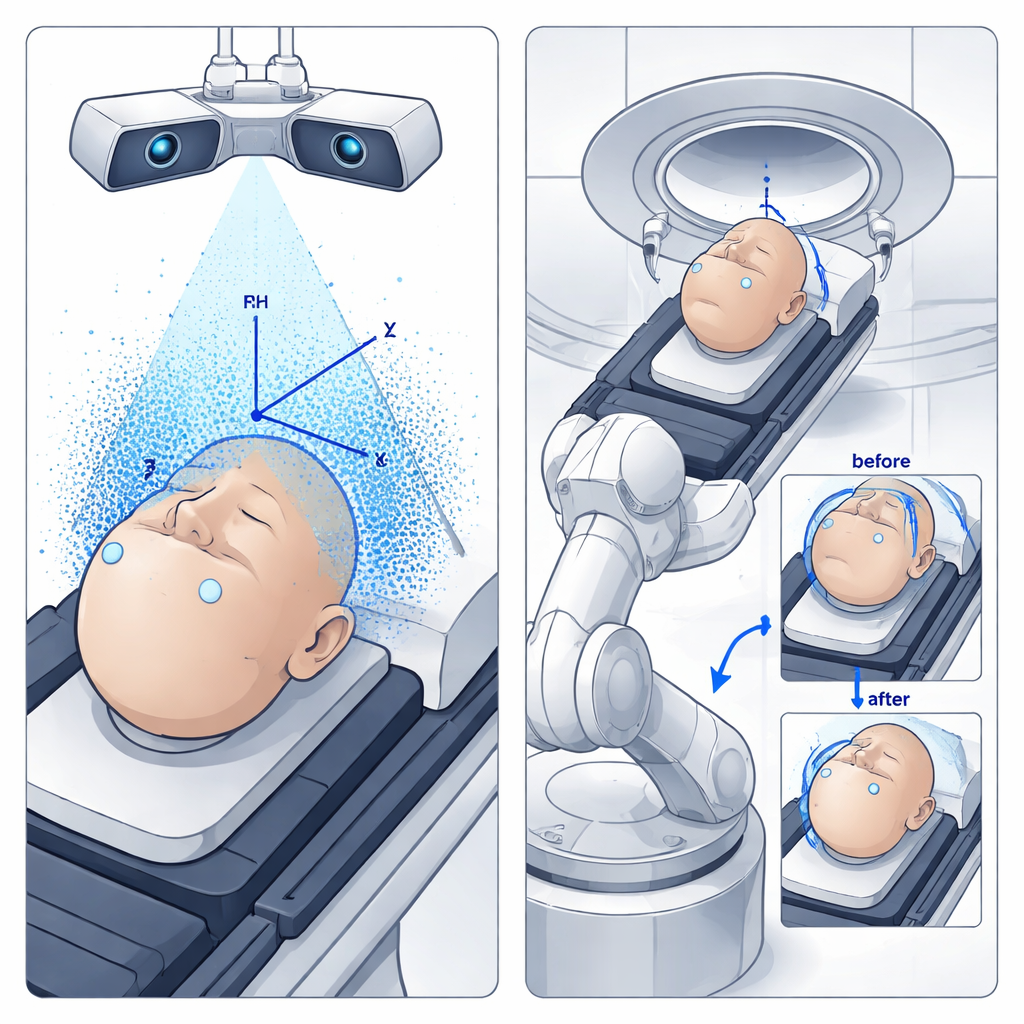
治療室では、高解像度の2台のカメラが人間の目のように異なる角度から患者を観察します。千枚以上の画像で学習した最新の物体検出アルゴリズム(YOLO)を用いて、システムは素早く同じフィデューシャルマーカーを患者表面から検出します。各マーカーが左右のカメラにどのように写るかを比較することで、コンピュータはマーカーの3次元位置を再構築し、表面の詳細なポイントクラウドを作成します。非共線の3点から患者座標系を再構築し、これを治療計画で定義された座標系と比較します。計画位置と実際位置の不一致は、産業用ロボットに対する並進と回転のコマンド(計6自由度)に変換されます。
代替患者を使ったテスト
実患者に適用する前に、チームはCTスキャンでもカメラでも見える内部・表面マーカーを備えた人体形状のファントムでシステムを試験しました。NeuMANTAで異なるビーム方向を持つ複数の治療セットアップを作成し、SG‑BNCTシステムにこれらの計画を自動で再現させるようにファントムを移動させました。中性子ビーム開口部の中心に置かれたレーザーを実際のビームの代わりとして用い、最終的にファントム上に得られた位置が意図したターゲットからビーム軸方向(ソースから皮膚までの距離)およびビームに垂直な平面内の横方向の両方でどれだけずれているかを直接測定しました。
どのくらい近づけたか?
24件の実験セットアップ全体で、位置決め誤差は通常どちらの方向でも1ミリメートル未満であり、単発の最悪ケースでもビーム軸方向で約2〜3ミリメートルに達しました。残差誤差の原因は主に3つに帰されました:CT画像スライス厚、ステレオカメラの小さな較正不確かさ、ソフトウェアがマーカーを検出する際のピクセルレベルの微小な不正確さです。重要な点として、本システムは閉ループ動作を想定して設計されています。マーカー位置を反復的に再測定し、3Dアライメントを更新し、残差が所定の閾値を下回るまでロボットに追加の微調整を指示します。これらの反復試験では、最終的な偏差は一貫して1ミリメートルを大きく下回り、深さ方向と横方向の双方でサブミリメートルの整合を達成しました。
患者にとっての意義
複雑でセンシティブな部位にある腫瘍を含め、BNCTで恩恵を受け得る患者にとって、この表面誘導かつロボット支援の位置決めシステムは、より確実で効率的な治療を実現する可能性があります。治療計画ソフトを実際の患者を“見る”カメラと精密な動作を実行できるロボットに直結させることで、手動レーザー合わせや人の勘に頼る度合いを低減します。現行バージョンは真のリアルタイム動体追跡にはまだ遅く、これまで静的試験しか行われていませんが、技術は日常的にサブミリメートル精度で患者を位置決めできることを示しています。さらなる速度向上やハードウェアの耐放射化が進めば、この手法は臨床でより安全かつ一貫性のあるBNCT治療の実用的な基盤となり得ます。
引用: Chen, J., Xie, QL., Ping, JJ. et al. Development and evaluation of surface-guided patient position system for boron neutron capture therapy. Sci Rep 16, 5818 (2026). https://doi.org/10.1038/s41598-026-35834-6
キーワード: ホウ素中性子捕捉療法, 患者の位置決め, 立体視, 医療用ロボティクス, 表面ガイダンス